Clear Sky Science · he
פתרונות קינמטיקה הופכית ממוטבים עבור רובוט בעל 6 דרגות חופש
רובוטים שנעים כמו יד יציבה
כאשר מנתח משתמש בזרוע רובוטית לתפירת רקמה עדינה, כל עשירית מילימטר משנה. על הרובוט לנוע במהירות ובחלקות לאורך מסלול מתוכנן, גם כאשר מפרקיו נמצאים בעמדות לא נוחות. מסמך זה חוקר כיצד שיטות חישוב שונות יכולות להנחות זרוע תעשייתית בעלת שישה מפרקים כיצד להזיז כל מפרק כך שקצה הזרוע יעקוב אחרי קו רצוי במרחב בדיוק ובאמינות מירביים.
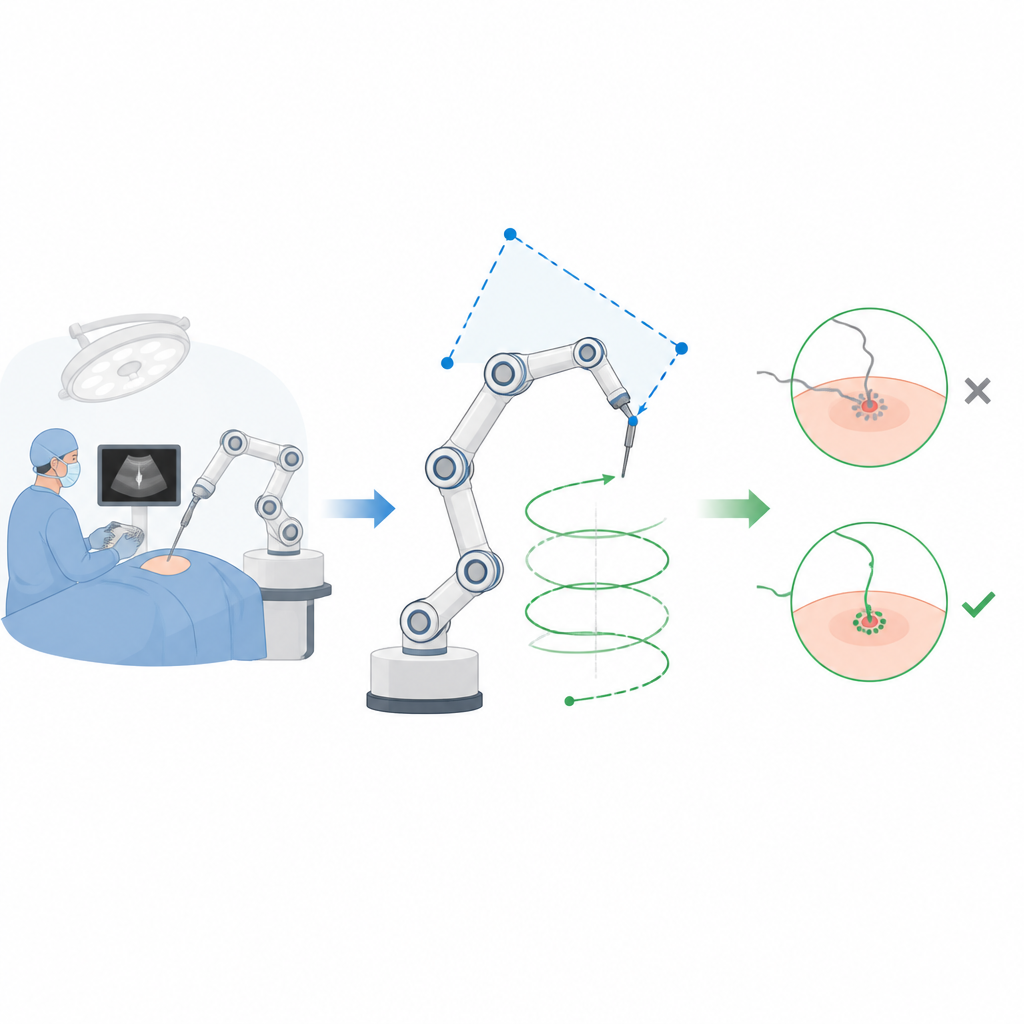
כיצד הרובוטים מחליטים באיזה כיוון לכופף
לזרוע רובוט יש מפרקים בדומה לזרוע אנושית, והבעיה הנפוצה נקראת קינמטיקה הופכית: אם יודעים היכן רוצים שמגיע קצה הרובוט, אילו זוויות צריכים המפרקים לקבל? עבור רובוטים פשוטים מהנדסים יכולים לנסח נוסחאות סגורות. אך זרועות מודרניות המשמשות בניתוח או בייצור לעיתים קרובות בעלות פריסות מורכבות ומגבלות מפרקים מחמירות. במקרים אלה מהנדסים פונים לשיטות חיפוש נומריות שמנסות שילובי מפרקים שונים עד שמוצאות אחד הממקם את הקצה קרוב ליעד תוך שמירה על תחומי בטיחות.
מדוע קיצורי דרך קלאסיים לא תמיד מספיקים
ממירים נומריים מסורתיים מהירים, אך פועלים קצת כמו נהגים שמסתכלים רק כמה מטרים קדימה. השיטה המכונה תכנות ריבועי עוקב (Sequential Quadratic Programming) מחליקה במהירות במורד נוף מתמטי ומוצאת פתרון מקומי קרוב. זה עובד היטב כאשר הניחוש ההתחלתי כבר קרוב לפתרון טוב, אך עלול להיתקע בעמק גרוע אם נקודת ההתחלה לא מוצלחת או כאשר הרובוט קרוב לקונפיגורציה שבה שינויים קטנים במפרקים גורמים לתזוזה גדולה בקצה. גישות אחרות, כגון אופטימיזציה בהשראת נמלים (Ant Colony Optimization) או Branch and Bound, מחפשות באופן רחב יותר אזורים מבטיחים אך עלולות לקחת זמן רב יותר בחישוב.
הרכבת אסטרטגיות חיפוש תחת קורת גג אחת
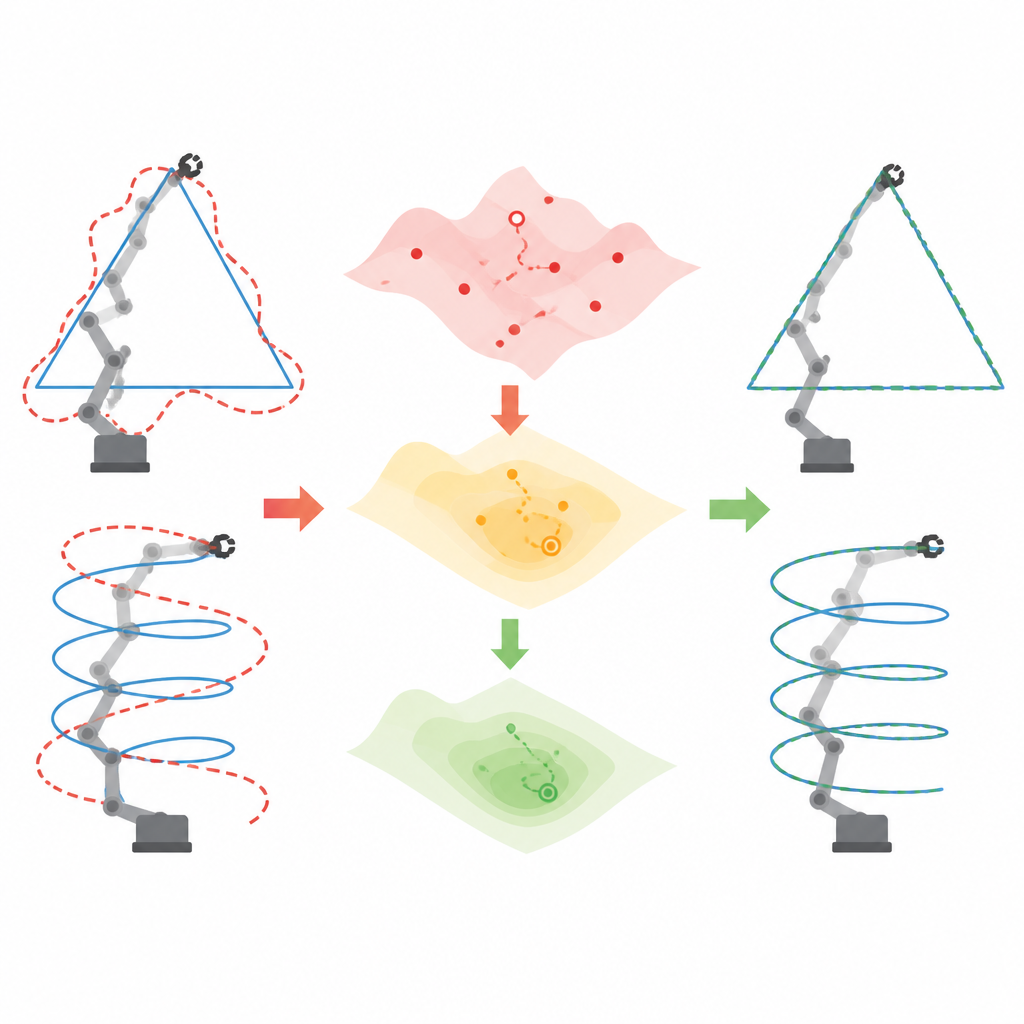
המחברים בנו מסגרת בדיקה אחידה סביב זרוע תעשייתית בעלת שישה מפרקים בשם Viper 650s. כל שיטה שנחקרה הייתה צריכה לפתור בדיוק את אותן משימות באמצעות אותו דגם רובוט, אותם מגבלות מפרקים ואותם מדדי הצלחה. נבחרו שני מסלולים מייצגים: משולש שטוח ואילבורית תלת-ממדית, כל אחד מוגדר על ידי 51 נקודות יעד. עבור כל נקודה במסלולים אלה השיטות נדרשו לחשב זוויות מפרק שממקמות את קצה הרובוט בקרבה מקסימלית למיקום ולכיוון הרצויים, תוך הימנעות מעמדות מפרק אסורות ושמירה על חלקות התנועה מנקודה לנקודה.
שילוב חיפוש גלובלי עם כוונון מדויק
השוו שישה אסטרטגיות פתרון. שלוש מהן היו שיטות "עצמאיות": המפענח המקומי המהיר (SQP), חיפוש שבירת תחומים (Branch and Bound) וחיפוש בהשראת משפחות (Ant Colony Optimization). השלוש הנותרות היו היברידים ששילבו את הרעיונות הללו. אחת השתמשה בנמלים כדי להציע נקודת התחלה טובה ל-SQP. אחרת השתמשה ב-Branch and Bound כדי לחתוך טווחי מפרקים מבטיחים לפני שיושם SQP לכיוונון. העיצוב המפורט ביותר שילב את כל השלבים: הנמלים חקרו תחילה את כל מרחב המפרקים כדי למצוא אזורים מבטיחים, Branch and Bound היצמצם אזורים אלה לתיבות הדוקות יותר, ולבסוף SQP ליטש את התוצאה לפתרון מקומי מדויק.
מה חשפו הבדיקות
הצוות הריץ כל שיטה 20 פעמים על שני המסלולים — המשולש והאילבורית — ומדד שתי תוצאות עיקריות: כמה זמן לקח לחשב מסלול שלם ועד כמה, בממוצע, סטה המסלול שבוצע של קצה הרובוט מהמסלול האידיאלי. שיטת SQP הפשוטה הייתה בעקביות המהירה ביותר, מה שהופך אותה לאטרקטיבית כאשר זמן חישוב הוא דאגה ראשית. יחד עם זאת, ההיבריד התלת-שלבי ששילב חיפוש נמלים, חיפוש תחום ומילוי מקומי נתן את שגיאת המסלול הממוצעת הקטנה ביותר בשני המסלולים, וקיצץ סטיות בכ־הרבע בהשוואה ל-SQP בתנאי המבחן, במחיר של עלות חישוב נוספת.
מדוע זה חשוב לרובוטים בעולם האמיתי
באופן פשוט, המחקר מראה ששילוב זהיר של חיפוש רחב טווח עם כוונון מקומי מדויק יכול לגרום לזרוע רובוטית לעקוב אחרי קו בצורה נאמנה יותר, מבלי לשנות את החומרה או את המנועים ברמת הבסיס. עבור משימות כמו תפירה כירורגית או הרכבה עדינה, שבהן הבדלים גיאומטריים קטנים יכולים להיות משמעותיים, ההיבריד התלת-שלבי מציע אופציה מדויקת יותר, בעוד ש-SQP הקלאסי נשאר בחירה טובה כאשר המהירות חשובה. העבודה משמשת כאבן בוחן משותפת, ומסייעת למהנדסים לבחור ולשפר שיטות תכנון תנועה ליישומים רובוטיים תובעניים.
ציטוט: Bayoume, M.O., Abdelgeliel, M., Saber, E. et al. Optimized inverse kinematics solutions for a 6-DOF robot. Sci Rep 16, 15342 (2026). https://doi.org/10.1038/s41598-026-51032-w
מילות מפתח: קינמטיקה הופכית, בקרת זרוע רובוטית, רובוטיקה כירורגית, שיטות אופטימיזציה, מעקב מסלול