Clear Sky Science · nl
Geoptimaliseerde oplossingen voor inverse kinematica voor een robot met 6 vrijheidsgraden
Robots die bewegen als een vaste hand
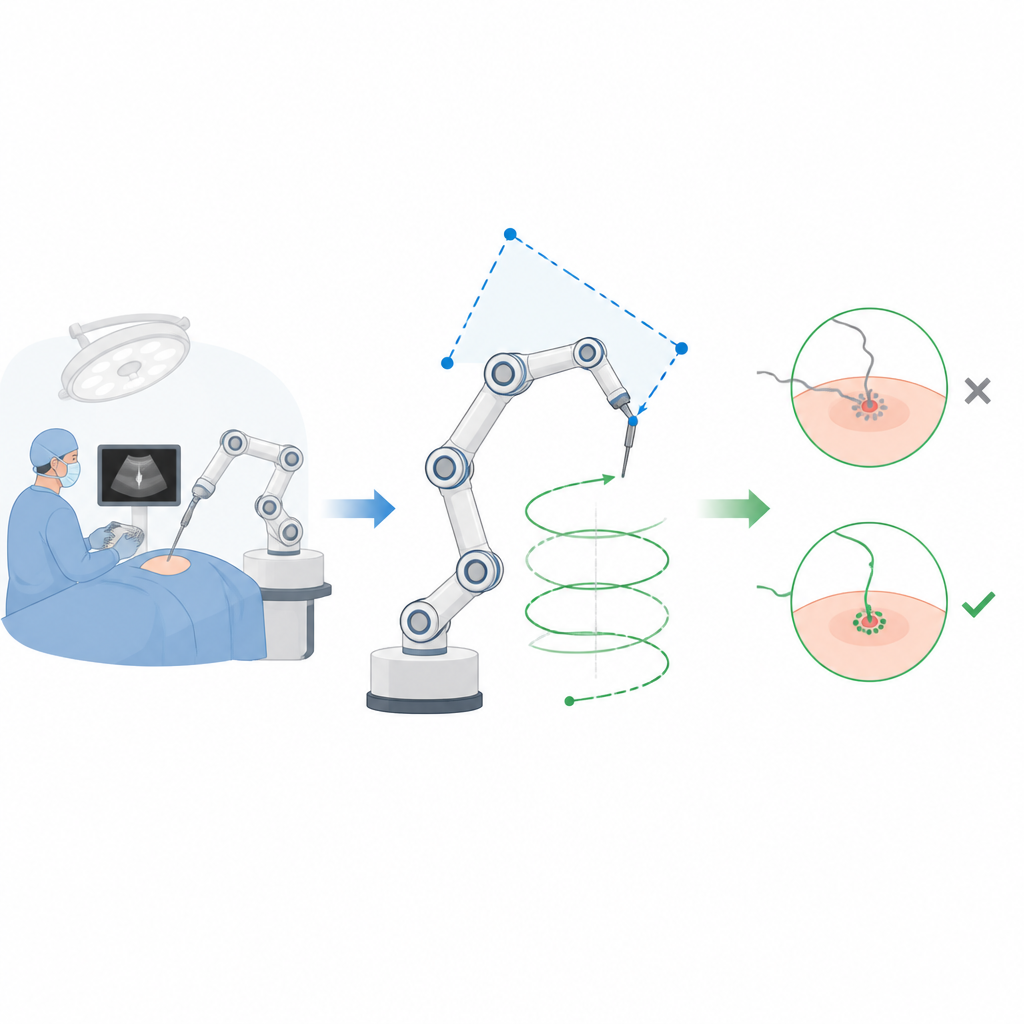
Wanneer een chirurg een robotarm gebruikt om kwetsbaar weefsel te hechten, telt elke fractie van een millimeter. De robot moet snel en vloeiend langs een gepland pad bewegen, zelfs wanneer zijn gewrichten in ongunstige standen staan. Dit artikel onderzoekt hoe verschillende computermethoden een industriële robotarm met zes gewrichten precies kunnen aansturen, zodat het uiteinde de gewenste lijn in de ruimte zo nauwkeurig en betrouwbaar mogelijk volgt.
Hoe robots beslissen welke kant ze buigen
Een robotarm heeft gewrichten zoals een menselijke arm, en een veelvoorkomend probleem wordt inverse kinematica genoemd: gegeven waar je het uiteinde van de robot wilt hebben, welke hoeken moeten de gewrichten dan aannemen? Voor eenvoudige robots kunnen ingenieurs exacte formules opstellen. Moderne armen die in de chirurgie of productie worden gebruikt, hebben vaak echter complexe configuraties en strakke gewrichtsbeperkingen. In die gevallen schakelen ingenieurs over op numerieke zoekmethoden die verschillende gewrichtscombinaties uitproberen totdat ze er een vinden die het uiteinde dicht bij het doel plaatst en binnen veilige grenzen blijft.
Waarom klassieke shortcuts niet altijd volstaan
Traditionele numerieke oplossers zijn snel, maar ze gedragen zich een beetje als bestuurders die slechts een paar meter vooruit kijken. De methode bekend als Sequential Quadratic Programming glijdt snel heuvelafwaarts op een wiskundig landschap om een nabije oplossing te vinden. Dit werkt goed wanneer de beginguessing al dicht bij een goede oplossing ligt, maar kan vastlopen in een ongunstige dal als het startpunt ongelukkig is of de robot zich in een configuratie bevindt waarbij kleine gewrichtsveranderingen grote bewegingen van het uiteinde veroorzaken. Andere benaderingen, zoals Ant Colony Optimization of Branch and Bound, zoeken veel breder naar veelbelovende regio's maar kunnen meer rekentijd vergen.
Zoekstrategieën onder één dak brengen
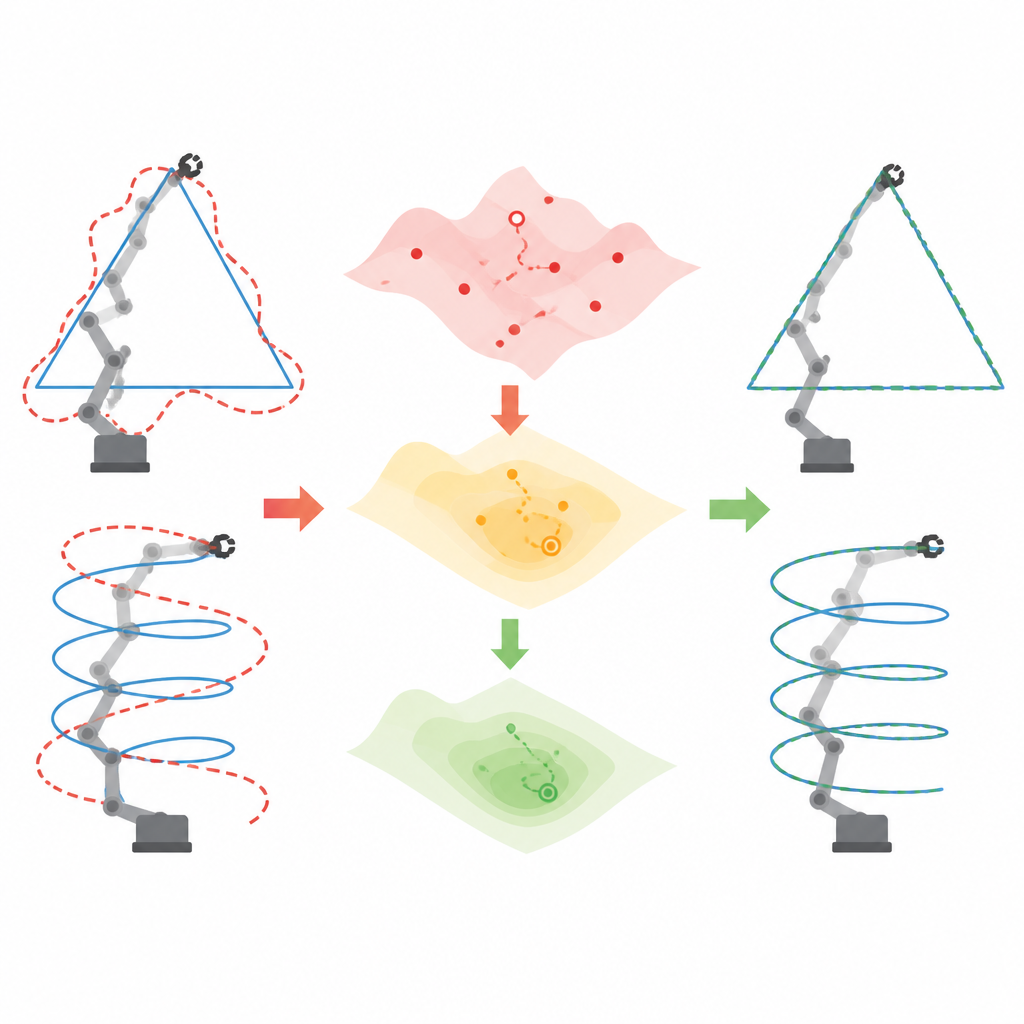
De auteurs bouwden een enkel testframework rond een industriële zespootige robot genaamd de Viper 650s. Elke methode die ze bestudeerden moest precies dezelfde taken oplossen met hetzelfde robotmodel, dezelfde gewrichtsbeperkingen en dezelfde succesmaatstaven. Twee representatieve paden werden gekozen: een vlakke driehoek en een driedimensionale helix, elk gedefinieerd door 51 doelpunten. Voor elk punt langs deze paden moesten de methoden gewrichtshoeken berekenen die het robotuiteinde zo dicht mogelijk bij de gewenste positie en oriëntatie plaatsen, terwijl illegale gewrichtsposities worden vermeden en de beweging van het ene punt naar het volgende soepel blijft.
Globaal zoeken combineren met fijnslijpen
Zes oplossingsstrategieën werden vergeleken. Drie waren "op zichzelf staande" methoden: de snelle lokale oplosser (SQP), een gebiedsverdelende zoekmethode (Branch and Bound) en een zwerm-geïnspireerde zoektocht (Ant Colony Optimization). De andere drie waren hybriden die deze ideeën aaneenrijgden. Eén gebruikte de zwerm om een goed startpunt voor SQP aan te dragen. Een andere gebruikte Branch and Bound om veelbelovende gewichtsintervallen uit te snijden voordat SQP verfijnde. Het meest uitgebreide ontwerp combineerde alle drie de fasen: eerst verkenden de mieren de volledige gewrichtsruimte om veelbelovende gebieden te vinden, daarna vernauwde Branch and Bound die gebieden tot strakkere vakken, en ten slotte polijstte SQP het resultaat tot een nauwkeurige lokale oplossing.
Wat de tests onthulden
Het team voerde elke methode 20 keer uit op zowel het driehoek- als het helixpad en mat twee hoofdresultaten: hoe lang het duurde om een heel traject te berekenen en hoe ver, gemiddeld, het uitgevoerde pad van het robotuiteinde afweek van het ideale pad. De eenvoudige SQP-methode was consequent het snelst, wat aantrekkelijk is wanneer rekentijd de belangrijkste zorg is. De driefasen-hybride die mierzoektocht, begrensde zoekactie en lokale verfijning combineerde, leverde echter de kleinste gemiddelde padowijking op beide paden en verkleinde de afwijkingen met ongeveer een kwart vergeleken met SQP onder de geteste omstandigheden, tegen de prijs van extra rekentijd.
Waarom dit belangrijk is voor robots in de praktijk
In eenvoudige bewoordingen laat deze studie zien dat het zorgvuldig combineren van ruimtelijke zoekmethoden met precieze lokale afstemming een robotarm een lijn getrouwer kan laten volgen, zonder dat de hardware of laag-niveau motoren worden veranderd. Voor taken zoals chirurgisch hechten of fijne assemblage, waarbij kleine geometrische verschillen van belang kunnen zijn, biedt de driefasen-hybride een nauwkeuriger optie, terwijl klassieke SQP een goede keuze blijft wanneer snelheid prioriteit heeft. Het werk dient als een gemeenschappelijke benchmark die ingenieurs helpt bij het kiezen en verfijnen van bewegingsplanningsmethoden voor veeleisende robottoepassingen.
Bronvermelding: Bayoume, M.O., Abdelgeliel, M., Saber, E. et al. Optimized inverse kinematics solutions for a 6-DOF robot. Sci Rep 16, 15342 (2026). https://doi.org/10.1038/s41598-026-51032-w
Trefwoorden: inverse kinematica, robotarmbesturing, chirurgische robotica, optimalisatiemethoden, trajectvolging