Clear Sky Science · de
Optimierte Lösungen der inversen Kinematik für einen 6-DOF-Roboter
Roboter, die sich wie eine ruhige Hand bewegen
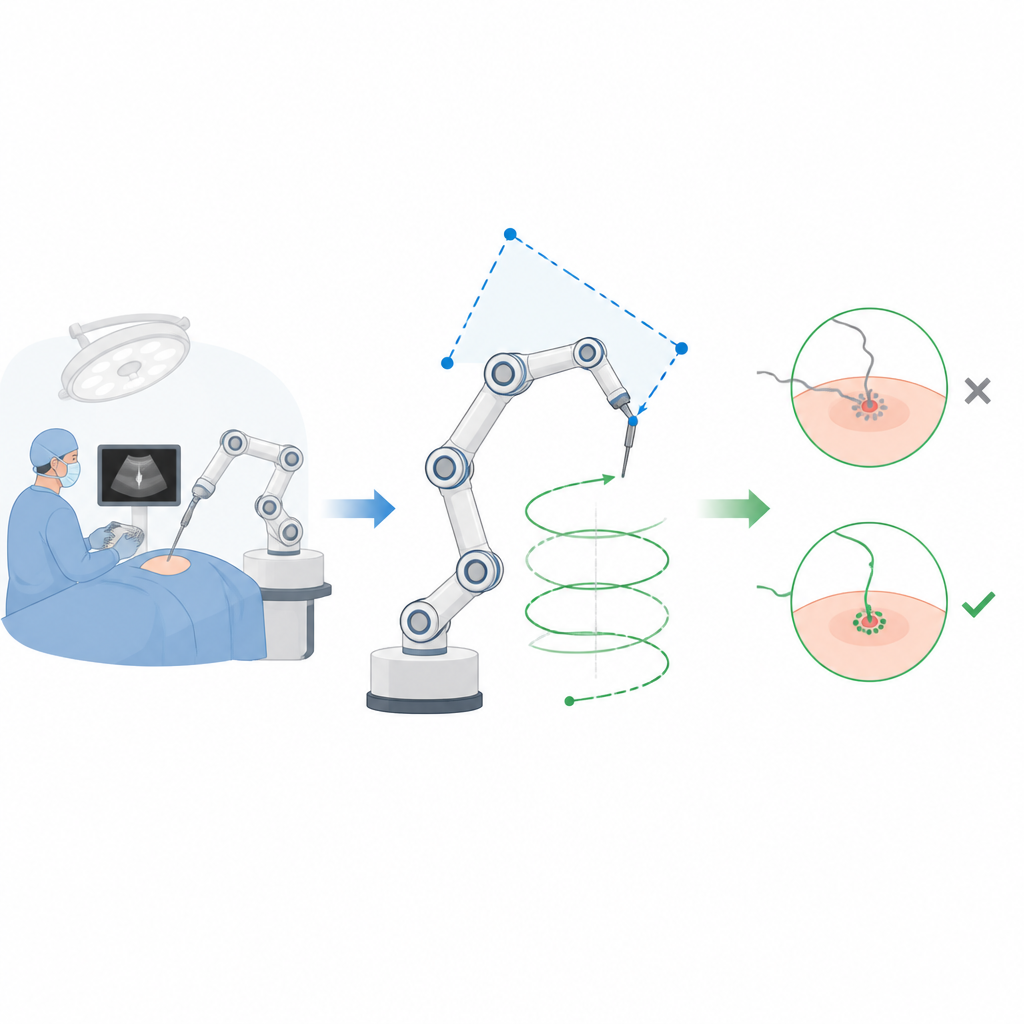
Wenn ein Chirurg einen Roboterarm zum Nähen empfindlichen Gewebes einsetzt, zählt jeder Bruchteil eines Millimeters. Der Roboter muss schnell und gleichmäßig einer geplanten Bahn folgen, selbst wenn seine Gelenke ungünstig stehen. Diese Arbeit untersucht, wie verschiedene Rechnerverfahren einem sechsgliedrigen Industrieroboter genau sagen können, wie seine Gelenke bewegt werden sollen, damit seine Spitze einer gewünschten Raumlinie so genau und zuverlässig wie möglich folgt.
Wie Roboter entscheiden, wohin sie sich biegen
Ein Roboterarm hat Gelenke wie ein menschlicher Arm; ein häufiges Problem heißt inverse Kinematik: Gegeben ist die gewünschte Position der Spitze — welche Gelenkwinkel müssen eingenommen werden? Bei einfachen Robotern lassen sich oft exakte Formeln herleiten. Moderne Arme, wie sie in Chirurgie oder Fertigung eingesetzt werden, besitzen jedoch oft komplexe Geometrien und enge Gelenkgrenzen. In solchen Fällen greifen Ingenieure auf numerische Suchverfahren zurück, die verschiedene Gelenkkombinationen ausprobieren, bis eine gefunden ist, die die Spitze nahe am Ziel platziert und gleichzeitig sichere Bereiche einhält.
Warum klassische Abkürzungen nicht immer ausreichen
Traditionelle numerische Löser sind schnell, verhalten sich aber ein wenig wie Fahrer, die nur ein paar Meter vorausblicken. Das Verfahren namens Sequential Quadratic Programming (SQP) gleitet schnell einen mathematischen Berg hinab, um eine nahegelegene Lösung zu finden. Das funktioniert gut, wenn die Anfangsschätzung bereits nahe an einer guten Lösung liegt, kann aber in einem schlechten Tal steckenbleiben, wenn der Startpunkt unglücklich ist oder der Roboter sich in einer Konfiguration befindet, in der kleine Gelenkänderungen große Spitzenbewegungen verursachen. Andere Ansätze, etwa Ameisenkolonie-Optimierung oder Branch-and-Bound, durchsuchen weiter nach vielversprechenden Regionen, können dafür jedoch mehr Rechenzeit benötigen.
Suchstrategien unter einem Dach vereinen
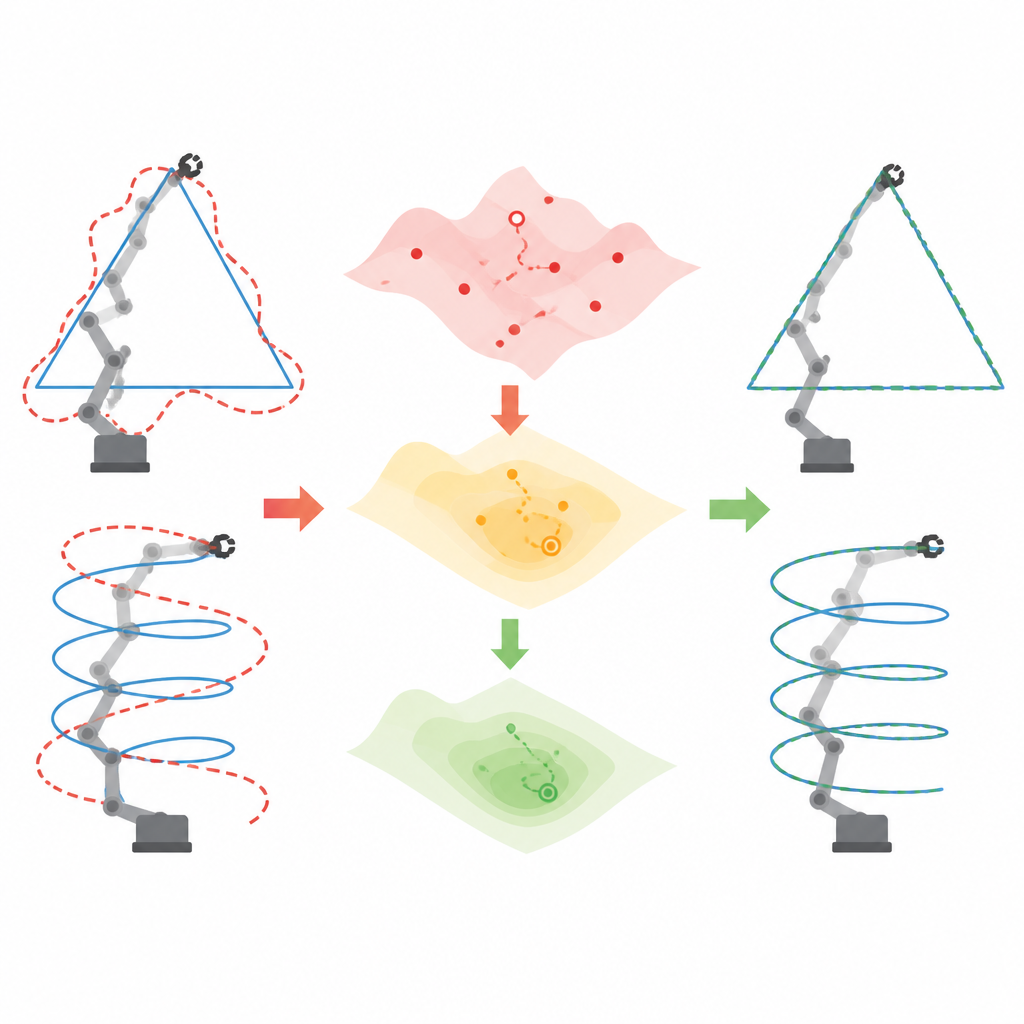
Die Autor:innen bauten einen einheitlichen Testrahmen um einen sechsgliedrigen Industrieroboter namens Viper 650s. Alle untersuchten Methoden mussten exakt dieselben Aufgaben mit dem gleichen Robotermodell, denselben Gelenkgrenzen und denselben Erfolgsmaßen lösen. Es wurden zwei repräsentative Bahnen gewählt: ein flaches Dreieck und eine dreidimensionale Helix, jeweils definiert durch 51 Zielpunkte. Für jeden Punkt entlang dieser Bahnen mussten die Methoden Gelenkwinkel berechnen, die die Roboterspitze so nahe wie möglich an die gewünschte Position und Orientierung bringen, dabei illegale Gelenkstellungen vermeiden und die Bewegung von einem Punkt zum nächsten glatt halten.
Globale Suche mit Feintuning kombinieren
Sechs Lösungsstrategien wurden verglichen. Drei waren «einzelne» Methoden: der schnelle lokale Löser (SQP), eine regionsaufspaltende Suche (Branch and Bound) und eine schwarminspirierte Suche (Ant Colony Optimization). Die anderen drei waren Hybride, die diese Ideen hintereinander schalteten. Eine nutzte den Schwarm, um eine gute Startschätzung für SQP zu liefern. Eine andere verwendete Branch and Bound, um vielversprechende Gelenkbereiche auszuwählen, bevor SQP verfeinerte. Das aufwändigste Design kombinierte alle drei Stufen: Zuerst erkundeten Ameisen den gesamten Gelenkraum, um vielversprechende Bereiche zu finden; Branch and Bound schränkte diese Bereiche dann auf engere Boxen ein; schließlich polierte SQP das Ergebnis zu einer präzisen lokalen Lösung.
Was die Tests zeigten
Das Team führte jede Methode 20-mal sowohl auf der Dreiecks- als auch auf der Helixbahn aus und maß zwei Hauptgrößen: wie lange die Berechnung einer gesamten Trajektorie dauerte und wie weit die ausgeführte Bahn der Roboterspitze im Mittel von der idealen Bahn abwich. Die einfache SQP-Methode war durchgängig am schnellsten und damit attraktiv, wenn die Rechenzeit im Vordergrund steht. Der dreistufige Hybrid aus Ameinensuche, begrenzter Suche und lokaler Verfeinerung erzielte jedoch auf beiden Bahnen den geringsten mittleren Bahnfehler und reduzierte die Abweichungen unter den getesteten Bedingungen um etwa ein Viertel gegenüber SQP — allerdings zu einem höheren Rechenaufwand.
Warum das für reale Roboter wichtig ist
Kurz gesagt zeigt diese Studie, dass die sorgfältige Kombination von breitgefächerter Suche und präziser lokaler Feinabstimmung einen Roboterarm eine Linie treuer nachzeichnen lässt, ohne die Hardware oder die Antriebstechnik zu ändern. Für Aufgaben wie chirurgisches Nähen oder feine Montage, bei denen kleine geometrische Unterschiede entscheidend sein können, bietet der dreistufige Hybrid eine genauere Option, während klassisches SQP eine gute Wahl bleibt, wenn Geschwindigkeit Priorität hat. Die Arbeit dient als gemeinsamer Benchmark und hilft Ingenieur:innen dabei, Bewegungsplanungsmethoden für anspruchsvolle Roboteranwendungen auszuwählen und zu verfeinern.
Zitation: Bayoume, M.O., Abdelgeliel, M., Saber, E. et al. Optimized inverse kinematics solutions for a 6-DOF robot. Sci Rep 16, 15342 (2026). https://doi.org/10.1038/s41598-026-51032-w
Schlüsselwörter: inverse Kinematik, Roboterarmsteuerung, chirurgische Robotik, Optimierungsmethoden, Trajektorienverfolgung