Clear Sky Science · it
Soluzioni di cinematica inversa ottimizzate per un robot a 6 gradi di libertà
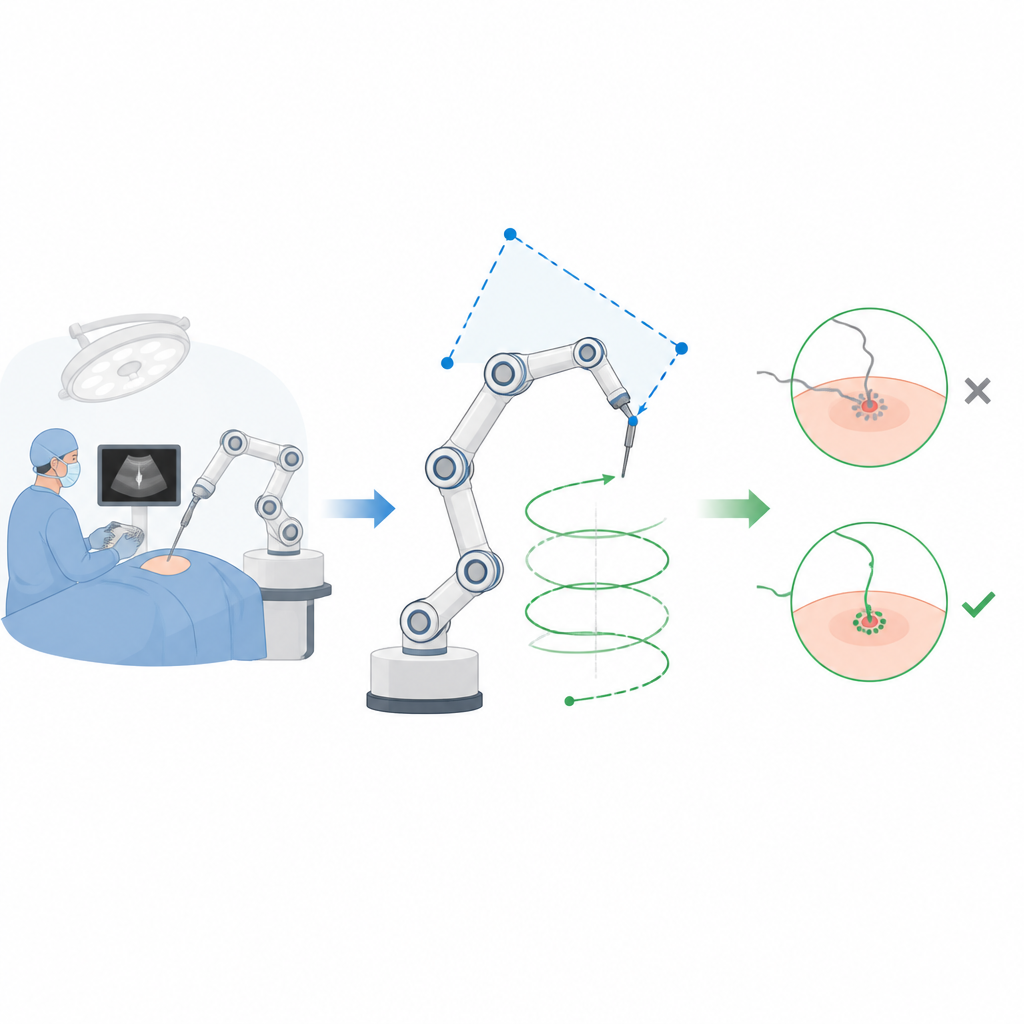
Robot che si muovono come una mano ferma
Quando un chirurgo usa un braccio robotico per suturare tessuti delicati, ogni frazione di millimetro conta. Il robot deve muoversi rapidamente e con scorrevolezza lungo un percorso pianificato, anche quando le sue giunture si trovano in posizioni scomode. Questo articolo esplora come diversi metodi computazionali possano indicare a un braccio industriale a sei giunti esattamente come muovere le articolazioni affinché la sua estremità segua una linea nello spazio nel modo più accurato e affidabile possibile.
Come i robot decidono in che direzione piegarsi
Un braccio robotico ha giunti simili a quelli del braccio umano, e un problema comune è chiamato cinematica inversa: dato dove si vuole che sia l’estremità del robot, quali angoli dovrebbero assumere le singole giunture? Per robot semplici gli ingegneri possono ricavare formule esplicite. Ma i bracci moderni usati in chirurgia o produzione spesso hanno configurazioni complesse e limiti articolari stringenti. In questi casi gli ingegneri ricorrono a metodi numerici di ricerca che provano diverse combinazioni di giunti finché non trovano una soluzione che posizioni l’estremità vicino all’obiettivo rispettando intervalli sicuri.
Perché gli stratagemmi classici non bastano sempre
I risolutori numerici tradizionali sono veloci, ma si comportano un po’ come conducenti che guardano solo pochi metri avanti. Il metodo noto come Sequential Quadratic Programming procede rapidamente in discesa su un paesaggio matematico per trovare una soluzione vicina. Ciò funziona bene quando la stima iniziale è già prossima a una buona soluzione, ma può rimanere intrappolato in un minimo locale se il punto di partenza è sfortunato o se il robot si trova vicino a configurazioni in cui piccoli spostamenti delle giunture provocano grandi movimenti dell’estremità. Altri approcci, come l’Ant Colony Optimization o il Branch and Bound, esplorano più ampiamente regioni promettenti ma possono richiedere tempi di calcolo maggiori.
Unire strategie di ricerca sotto un unico tetto
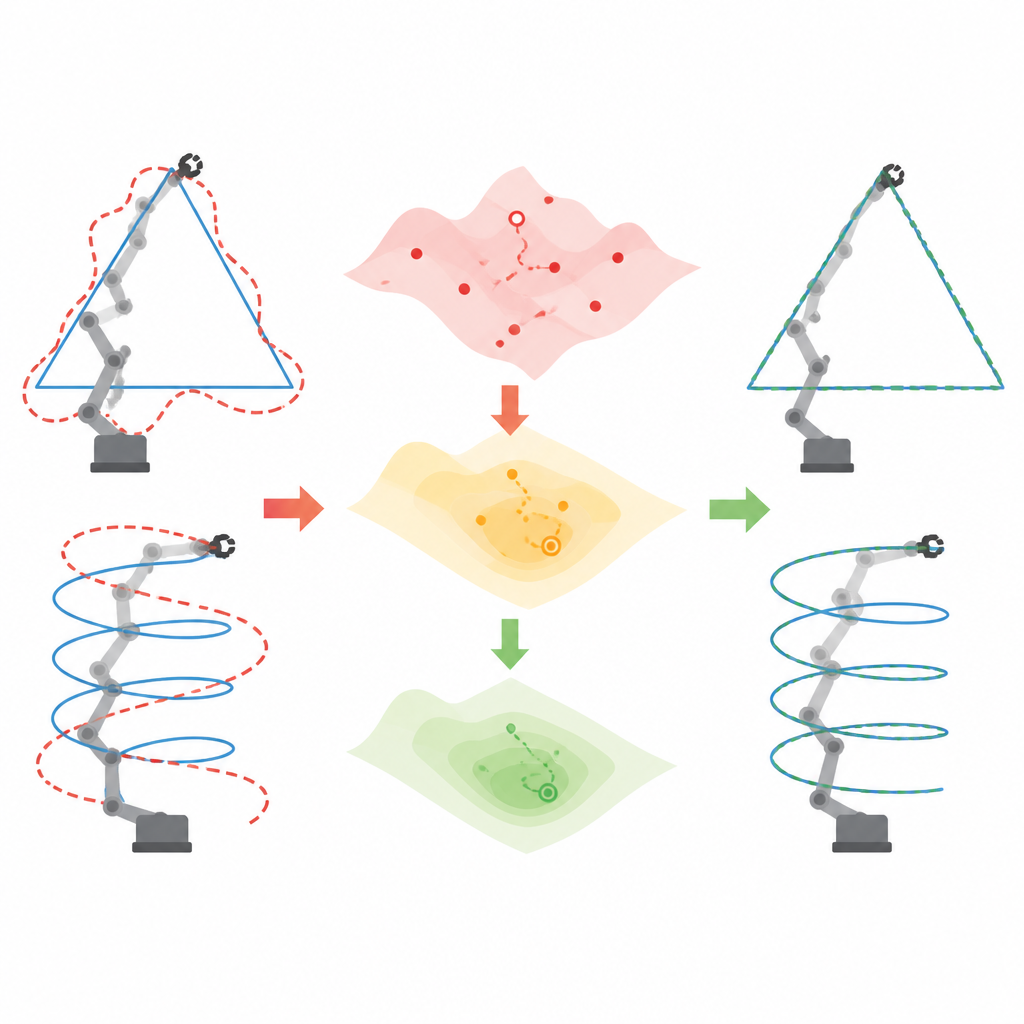
Gli autori hanno costruito un unico framework di test attorno a un robot industriale a sei giunti chiamato Viper 650s. Ogni metodo studiato doveva risolvere esattamente gli stessi compiti usando lo stesso modello del robot, gli stessi limiti delle giunture e le stesse misure di successo. Sono stati scelti due percorsi rappresentativi: un triangolo piano e un’elica tridimensionale, ognuno definito da 51 punti target. Per ogni punto lungo questi percorsi, i metodi dovevano calcolare gli angoli delle giunture che posizionassero l’estremità del robot il più vicino possibile alla posizione e all’orientamento desiderati, evitando posizioni articolari illegali e mantenendo il moto fluido da un punto al successivo.
Mischiare ricerca globale e rifinitura locale
Sono state confrontate sei strategie di soluzione. Tre erano metodi “standalone”: il risolutore locale veloce (SQP), una ricerca che divide la regione (Branch and Bound) e una ricerca ispirata agli sciami (Ant Colony Optimization). Le altre tre erano ibridi che concatenavano queste idee. Uno usava lo sciame per suggerire un buon punto di partenza per SQP. Un altro usava Branch and Bound per ritagliare intervalli articolari promettenti prima di raffinarli con SQP. Il progetto più elaborato combinava tutte e tre le fasi: le formiche esploravano prima l’intero spazio delle giunture per trovare aree promettenti, Branch and Bound restringeva poi quelle aree in scatole più strette e infine SQP lucidava il risultato fino a una soluzione locale precisa.
Cosa hanno rivelato i test
Il team ha eseguito ogni metodo 20 volte sia sui percorsi del triangolo sia su quelli dell’elica e ha misurato due risultati principali: quanto tempo impiegava a calcolare un’intera traiettoria e quanto si discostava, in media, il percorso eseguito dall’estremità del robot dal percorso ideale. Il metodo SQP puro è risultato costantemente il più veloce, rendendolo attraente quando il tempo di calcolo è la considerazione principale. Tuttavia, l’ibrido in tre fasi che mescolava ricerca con formiche, ricerca limitata e raffinamento locale ha prodotto l’errore medio di traiettoria più piccolo su entrambi i percorsi, riducendo le deviazioni di circa un quarto rispetto a SQP nelle condizioni testate, a costo di un calcolo aggiuntivo.
Perché questo è importante per i robot nel mondo reale
In termini semplici, questo studio mostra che combinare con cura una ricerca ampia con una messa a punto locale precisa può far sì che un braccio robotico segua una linea in modo più fedele, senza cambiare l’hardware o gli attuatori di basso livello. Per compiti come la sutura chirurgica o il montaggio di precisione, dove piccole differenze geometriche possono essere determinanti, l’ibrido in tre fasi offre un’opzione più accurata, mentre il classico SQP rimane una buona scelta quando la velocità è la priorità. Il lavoro funge da benchmark comune, aiutando gli ingegneri a scegliere e perfezionare i metodi di pianificazione del moto per applicazioni robotiche esigenti.
Citazione: Bayoume, M.O., Abdelgeliel, M., Saber, E. et al. Optimized inverse kinematics solutions for a 6-DOF robot. Sci Rep 16, 15342 (2026). https://doi.org/10.1038/s41598-026-51032-w
Parole chiave: cinematica inversa, controllo di bracci robotici, robotica chirurgica, metodi di ottimizzazione, tracciamento di traiettoria