Clear Sky Science · sv
Optimerade lösningar för invers kinematik för en 6-DOF-robot
Robotar som rör sig som en stadig hand
När en kirurg använder en robotarm för att sy känslig vävnad spelar varje bråkdel av en millimeter roll. Robotens måste röra sig snabbt och mjukt längs en planerad bana, även när dess leder befinner sig i besvärliga positioner. Denna artikel undersöker hur olika datorstyrda metoder kan ange exakt hur en sexlederad industrirobotarm ska vrida sina leder så att spetsen följer en önskad linje i rummet med största möjliga noggrannhet och pålitlighet.
Hur robotar bestämmer åt vilket håll de ska böjas
En robotarm har leder likt en människas arm, och ett vanligt problem kallas invers kinematik: givet var du vill att robotens spets ska befinna sig, vilka vinklar ska varje led anta? För enkla robotar kan ingenjörer skriva exakta formler. Men moderna armar som används i kirurgi eller tillverkning har ofta komplicerade utformningar och snäva ledgränser. I dessa fall vänder sig ingenjörer till numeriska sökmetoder som testar olika kombinationer av leder tills de hittar en som placerar spetsen nära målet samtidigt som säkra intervall respekteras.
Varför klassiska genvägar inte alltid räcker
Traditionella numeriska lösare är snabba, men de beter sig lite som förare som bara tittar några meter framåt. Metoden känd som Sequential Quadratic Programming (SQP) glider snabbt nedför en matematisk landskap för att hitta en närliggande lösning. Detta fungerar bra när startgissningen redan ligger nära ett bra svar, men den kan fastna i en dålig dal om startpunkten är olycklig eller om roboten befinner sig nära en konfiguration där små ledändringar ger stor förflyttning i spetsen. Andra tillvägagångssätt, såsom Ant Colony Optimization eller Branch and Bound, söker mer vida efter lovande regioner men kan ta längre tid att beräkna.
Samlade sökstrategier under ett tak
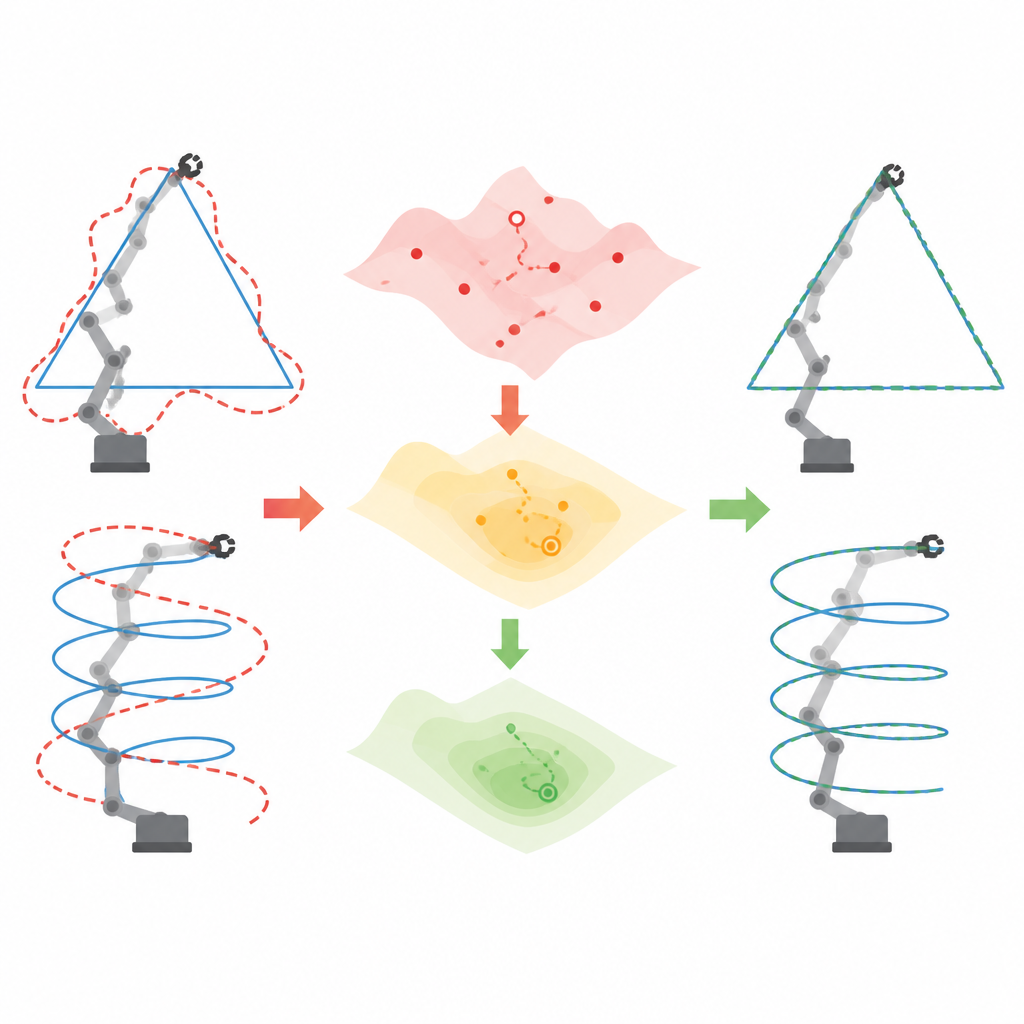
Författarna byggde ett enda testramverk kring en sexlederad industrirobot kallad Viper 650s. Varje metod de studerade var tvungen att lösa exakt samma uppgifter med samma robotmodell, samma ledbegränsningar och samma mått på framgång. Två representativa banor valdes: en platt triangel och en tredimensionell helix, vardera definierad av 51 målpunkt. För varje punkt längs dessa banor måste metoderna beräkna ledvinklar som placerade robotspetsen så nära som möjligt det önskade läget och orienteringen, samtidigt som olagliga ledpositioner undveks och rörelsen hölls jämn från en punkt till nästa.
Att blanda global sökning med finkalibrering
Seks lösningsstrategier jämfördes. Tre var »fristående» metoder: den snabba lokala lösaren (SQP), en regionsdelande sökning (Branch and Bound) och en svärminspirerad sökning (Ant Colony Optimization). De andra tre var hybrider som kedjade ihop dessa idéer. En använde svärmen för att föreslå en bra startpunkt för SQP. En annan använde Branch and Bound för att karva ut lovande ledintervall innan förfining med SQP. Den mest invecklade designen kombinerade alla tre steg: myrorna utforskade först hela ledutrymmet för att hitta lovande områden, Branch and Bound snävade sedan in dessa områden till tajtare boxar, och slutligen putsade SQP resultatet till en precis lokal lösning.
Vad testerna visade
Teamet körde varje metod 20 gånger på både triangel- och helixbanorna och mätte två huvudresultat: hur lång tid det tog att beräkna en hel bana och hur långt, i genomsnitt, robotspetsens utförda bana avvek från den idealiska banan. Den rena SQP-metoden var konsekvent snabbast, vilket gör den attraktiv när beräkningstid är den viktigaste faktorn. Däremot gav trestegs-hybriden som blandade myrsök, begränsad sökning och lokal förfining den minsta genomsnittliga banafvikelsen på båda banorna, och minskade avvikelserna med ungefär en fjärdedel jämfört med SQP under de testade förhållandena, till priset av ökad beräkningstid.
Varför detta spelar roll för verkliga robotar
Enkelt uttryckt visar denna studie att noggrant kombinerad vida sökningar med precis lokal finjustering kan få en robotarm att följa en linje mer troget, utan att ändra dess hårdvara eller låg nivå-motorer. För uppgifter som kirurgisk suturering eller finmontering, där små geometriska skillnader kan vara viktiga, erbjuder trestegs-hybriden ett mer exakt alternativ, medan klassisk SQP förblir ett bra val när snabbhet är prioritet. Arbetet fungerar som ett gemensamt referensprov som hjälper ingenjörer att välja och förfina banplaneringsmetoder för krävande robotapplikationer.
Citering: Bayoume, M.O., Abdelgeliel, M., Saber, E. et al. Optimized inverse kinematics solutions for a 6-DOF robot. Sci Rep 16, 15342 (2026). https://doi.org/10.1038/s41598-026-51032-w
Nyckelord: invers kinematik, styrning av robotarm, kirurgisk robotik, optimeringsmetoder, spårning av bana