Clear Sky Science · zh
考虑所有子系统和辐照度变化的光伏供电移动机器人双向轨迹跟踪的动态切换控制器
以阳光为动力的机器人
想象一台小型轮式机器人整天在田间或工业场地巡逻,仅靠太阳能供电,并能沿计划路径前后双向行驶而不偏离航线。本文研究如何赋予这类太阳能供电机器人足够的“智能”和反应能力,使其即便在掠过的云层或电力波动打断供能时仍能保持在轨。
为什么太阳能机器人难以控制
太阳能电池板不会提供稳定的电能。其电压和电流随光照、阴影、温度和老化而起伏。对机器人来说,这意味着电机可能会突然获得比预期更多或更少的能量。许多早期控制系统将机器人机体、电机和电源电子视为独立部分,或简化了电源级的行为。因此,它们通常只在单一行驶方向或理想光照条件下工作,在光照快速变化时可能失效。
将所有子系统纳入统一框架
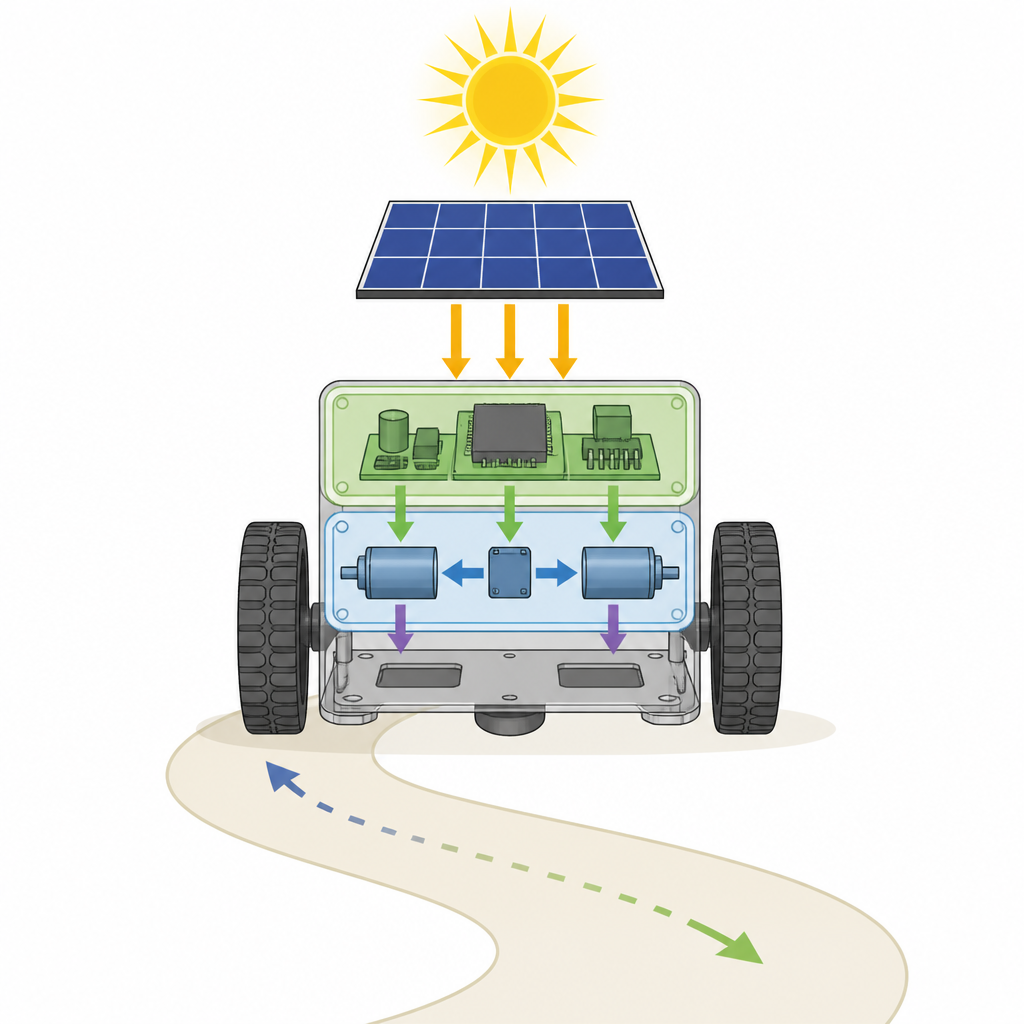
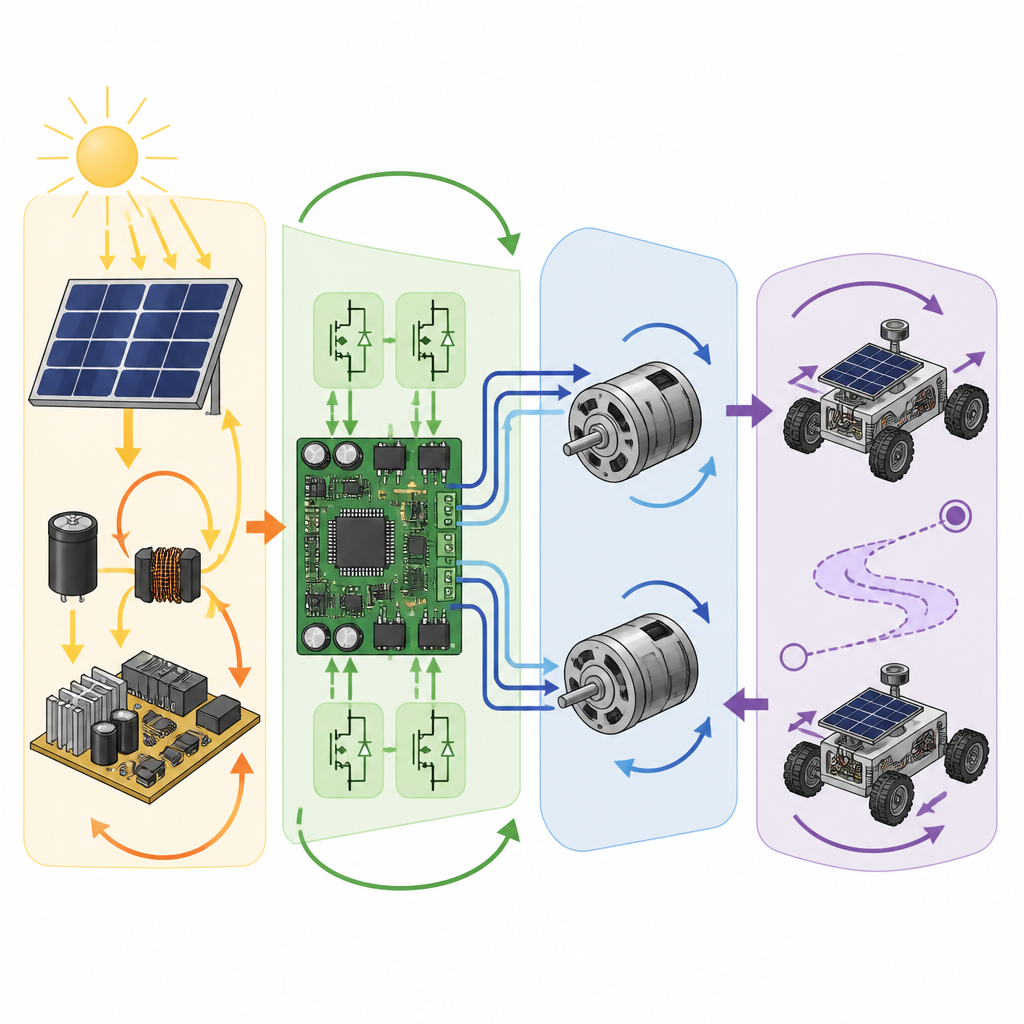
在这项工作中,作者设计了一个将轮式机器人的三大部分联结在一起的单一控制方案:机械底盘与车轮、驱动这些车轮的电机,以及将光伏板电能整形的电子设备。该机器人为差动驱动,通过改变左右轮速度实现转向。电源链包括商用光伏组件、将面板输出转换为电机可用电压的变换器,以及安装在每个车轮上的直流电机。通过用现实的方程对这些部分建模,团队可以预测在光照和内部参数变化时整机的响应。
三层决策系统
所提控制器呈现为自上而下叠置的三层决策系统。顶层为运动规划层,比对机器人的实际位置与航向与期望路径,并计算可能为正或负的目标车轮速度,从而实现真正的前后运动。第二层将速度目标转换为力矩进而转换为电机电流,使用简单的比例-积分规则使测得电流靠近目标值。底层为切换层,快速调整位于光伏板与电机之间的电子变换器。该层采用滑模与积分作用的混合策略来塑造输出电压,使电机在面板电压波动时仍能获得合适的电气条件。
在变化光照下的测试
为评估性能,研究者在 MATLAB 与 Simscape 中建立了详尽的仿真模型,包含真实的太阳能模块、逼真的电机模型和变换器电路。他们编程了一个平滑路径,使机器人先前进再沿环路倒退,同时虚拟太阳遵循两种不同模式。在一种情况下,辐照度像晴天一样逐渐升降;在另一种情况下,辐照度突然下降,并加入模拟云层和闪烁的噪声。团队还在运行中更改关键电气元件以模拟老化或温度变化。在所有这些条件下,新的控制器将机器人的位置和航向误差保持在极小量级,约为几毫米量级和极小弧度分数。
与早期方法的比较
作者将其设计与先前的一个三层控制器进行了比较,后者也考虑了机器人机体、电机和电源电子,但仅允许电机速度为单一方向。当两种控制器在光照变化时被要求沿同一往返路径行驶时,旧方法在需要负车轮速度时迅速丧失轨迹,误差急剧增长。相比之下,新切换控制器在两个方向上都保持精确跟踪并保持稳定,表明显式处理双向电机电压与切换行为对于太阳能供电机器人至关重要。
对未来太阳能机器人的意义
对于非专业读者,主要结论是:有可能设计出太阳能供电的移动机器人,能够沿复杂路线精确移动,包括前进与后退,并且不易受掠过云层或内部电气变化的干扰。通过在统一控制方案中协调机器人机体、电机与电源电路,这项工作为更可靠、更具能量感知能力的机器打下基础,使其能够在农田巡查、基础设施检测或环境监测等场景中直接“啜取”太阳能运行。
引用: Reyes-Reyes, E., Ordaz-Dehesa, J.C., Rodríguez-Cerón, J.R. et al. Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations. Sci Rep 16, 16188 (2026). https://doi.org/10.1038/s41598-026-47467-w
关键词: 太阳能机器人, 轨迹跟踪, 移动机器人, 可再生能源, 机器人控制