Clear Sky Science · sv
Dynamisk växlingsregulator för tvåvägs följning av bana i PV-drivna mobila robotar med hänsyn till alla deras delsystem och variationer i bestrålning
Robotar som drivs av solljus
Föreställ dig en liten hjulrobot som patrullerar ett fält eller en industriplats hela dagen, endast försörjd av solen, och som kan röra sig både framåt och bakåt längs en planerad bana utan att glida av kurs. Denna studie undersöker hur man ger sådana solmatade robotar de hjärnor och reflexer som krävs för att hålla sig på banan, även när passerande moln eller elektriska störningar rubbar deras energiförsörjning.
Varför solrobotar är svåra att reglera
Solpaneler levererar inte stabil effekt. Deras spänning och ström stiger och sjunker med solljus, skuggor, temperatur och åldrande. För en robot innebär det att motorerna plötsligt kan få mer eller mindre energi än väntat. Många tidigare styrsystem behandlade robotens mekanik, dess motorer och dess kraftelektronik som separata delar, eller förenklade hur effektsteget beter sig. Som resultat fungerade de ofta bara i en körriktning eller under idealbelysning, och kunde fallera när solljuset förändrades snabbt.
Samla alla delsystem under ett tak
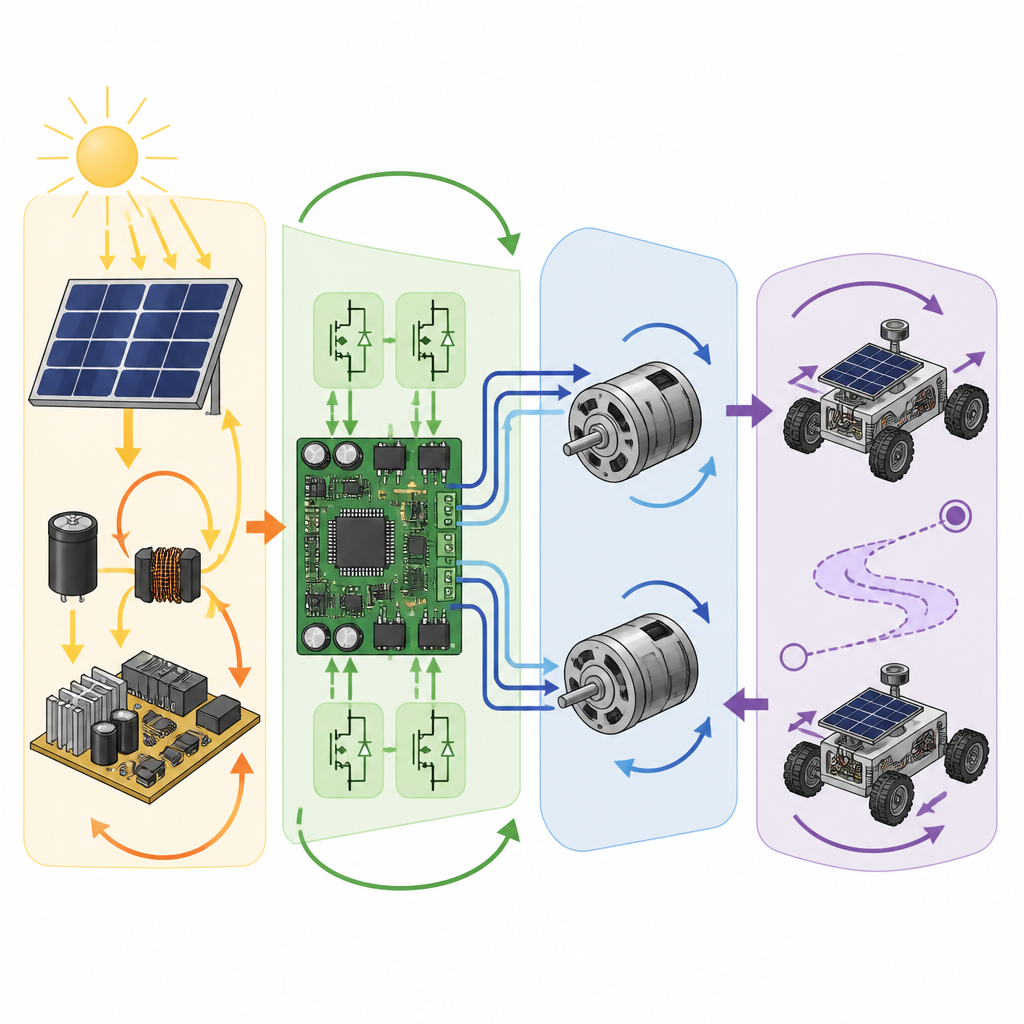
I detta arbete designar författarna en enhetlig styrmetod som knyter ihop robotens tre huvuddelar: den mekaniska chassit och hjulen, de elektriska motorerna som driver hjulen, och elektroniken som formar effekten från solpanelen. Robotens drift är differentialstyrd, genom att ändra hastigheten på vänster och höger hjul. Kraftkedjan inkluderar en kommersiell PV-panel, omvandlare som omvandlar panelens utgång till användbar motorspränning, och likströmsmotorer på varje hjul. Genom att modellera alla dessa delar med realistiska ekvationer kan teamet förutsäga hur hela maskinen svarar när solljus och interna parametrar förändras.
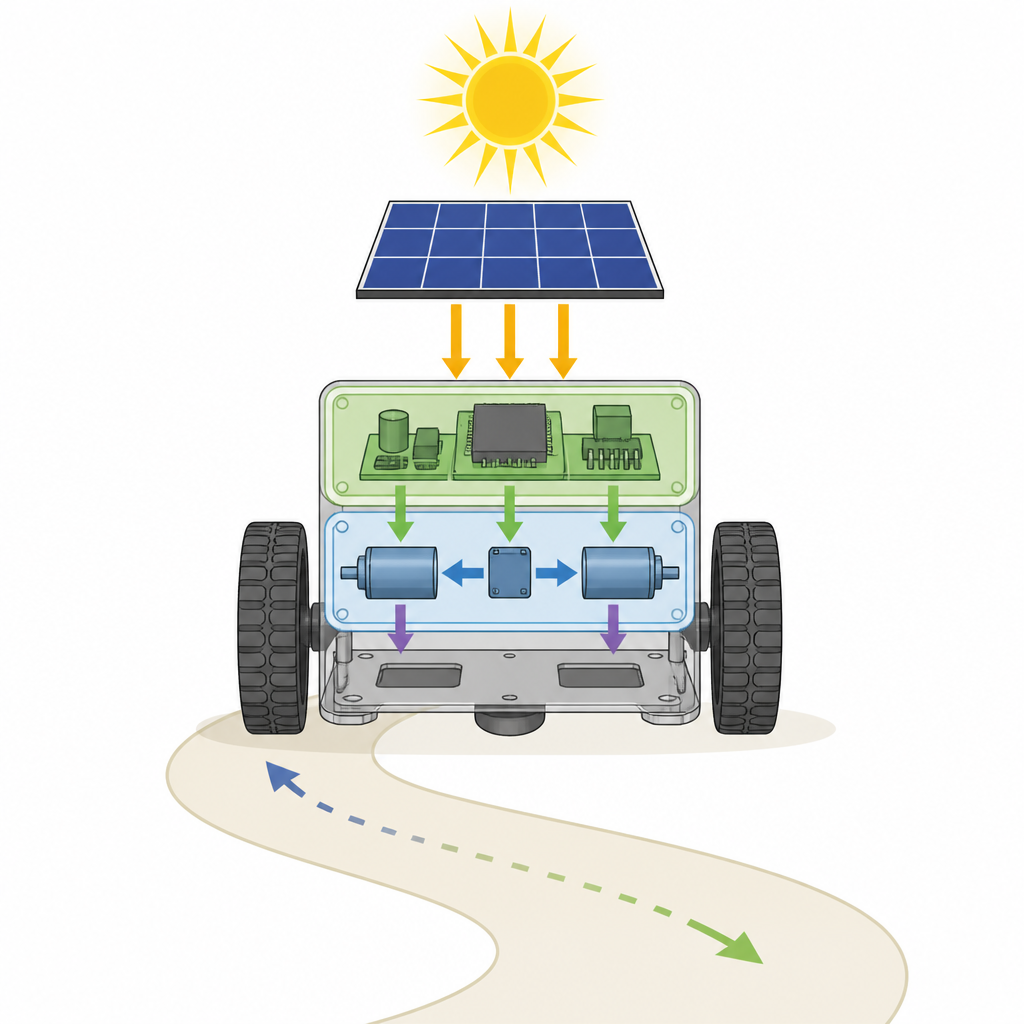
Ett trelagers beslutsystem
Den föreslagna regulatorn fungerar som ett trelagers beslutsystem staplat uppifrån och ned. Längst upp jämför ett rörelseplaneringslager robotens faktiska position och riktning med en önskad bana och beräknar målhjulhastigheter som kan vara positiva eller negativa, vilket möjliggör verklig fram- och tillbaka-rörelse. Ett andra lager omvandlar dessa hastighetsmål till vridmoment och sedan till motorströmmar, med enkla proportionella och integrerande regler för att hålla uppmätta strömmar nära sina mål. Nederst justerar ett växlingslager snabbt de elektroniska omvandlarna som sitter mellan solpanelen och motorerna. Detta lager använder en blandning av sliding- och integrerade åtgärder för att forma utspänningen så att motorerna ser rätt elektriska förhållanden trots svängningar i panelens spänning.
Testning under varierande solljus
För att utvärdera prestandan bygger forskarna en detaljerad simulering i MATLAB och Simscape, inklusive en verklig solmodul, realistiska motormodeller och omvandlarkretsar. De programmerar en jämn bana som får roboten att röra sig framåt och sedan backa runt en slinga, medan den virtuella solen följer två olika mönster. I ett fall stiger och faller bestrålningen som en klar dag. I ett annat fall sjunker bestrålningen abrupt, med tillagd brus som efterliknar moln och flimmer. Teamet ändrar också viktiga elektriska komponenter mitt i körningen för att imitera åldrande eller temperaturskiftningar. Under alla dessa förhållanden håller den nya regulatorn robotens position- och riktfel extremt små, i storleksordningen några tusendelar av en meter och en liten bråkdel av en radian.
Hur den står sig mot tidigare metoder
Författarna jämför sin design med en tidigare trestegsregulator som också beaktade robotkropp, motorer och kraftelektronik, men som bara tillät motorhastigheter i en enda riktning. När båda regulatorerna ombeds följa samma fram- och tillbaka-bana under varierande solljus tappar den äldre metoden snabbt spåret när negativa hjulhastigheter krävs, och dess fel växer mycket stora. Den nya växlingsregulatorn, däremot, bibehåller noggrann följning i båda riktningar och förblir stabil, vilket visar att explicit hantering av tvåvägs motorspänningar och växlingsbeteende är avgörande för solcellsdrivna robotar.
Vad detta betyder för framtida solrobotar
För en icke-specialist är huvudbudskapet att det är möjligt att konstruera solmatade mobila robotar som rör sig exakt längs komplexa rutter, både framåt och bakåt, utan att påverkas nämnvärt av passerande moln eller interna elektriska förändringar. Genom att samordna robotens kropp, motorer och kraftelektronik i en enhetlig styrmetod lägger detta arbete grunden för mer tillförlitliga, energi-medvetna maskiner som kan patrullera gårdar, inspektera infrastruktur eller övervaka miljön medan de sipprar energi direkt från solen.
Citering: Reyes-Reyes, E., Ordaz-Dehesa, J.C., Rodríguez-Cerón, J.R. et al. Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations. Sci Rep 16, 16188 (2026). https://doi.org/10.1038/s41598-026-47467-w
Nyckelord: solrobotar, baneföljning, mobila robotar, förnybar energi, robotreglering