Clear Sky Science · es
Controlador con conmutación dinámica para el seguimiento bidireccional de trayectorias en robots móviles alimentados por FV considerando todos sus subsistemas y variaciones de irradiancia
Robots que funcionan con la luz del sol
Imagínese un pequeño robot con ruedas patrullando un campo o una planta industrial durante todo el día, alimentado únicamente por el sol y capaz de moverse tanto hacia adelante como hacia atrás por una ruta planificada sin desviarse. Este estudio explora cómo dotar a esos robots alimentados por energía solar de la inteligencia y los reflejos necesarios para mantenerse en la trayectoria, incluso cuando nubes pasajeras o fallos eléctricos perturban su suministro de energía.
Por qué es difícil controlar robots solares
Los paneles solares no suministran energía constante. Su tensión y corriente suben y bajan con la luz solar, las sombras, la temperatura y el envejecimiento. Para un robot, eso significa que los motores pueden recibir de repente más o menos energía de la esperada. Muchos sistemas de control anteriores trataban el chasis del robot, sus motores y su electrónica de potencia como piezas separadas, o simplificaban el comportamiento de la etapa de potencia. Como resultado, a menudo funcionaban solo en una dirección de marcha o bajo iluminación ideal, y podían fallar cuando la irradiancia cambiaba rápidamente.
Integrando todos los subsistemas
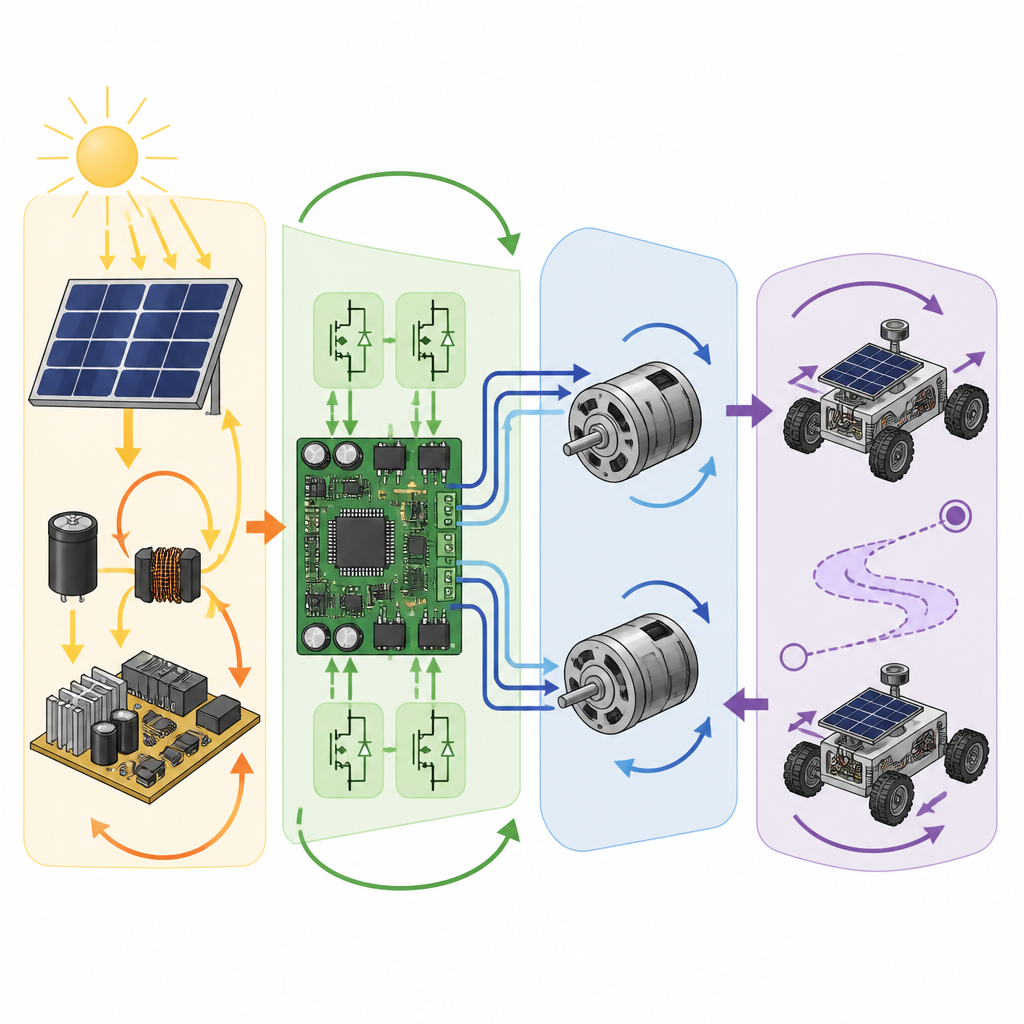
En este trabajo, los autores diseñan un esquema de control único que integra las tres partes principales de un robot con ruedas: el chasis mecánico y las ruedas, los motores eléctricos que hacen girar esas ruedas y la electrónica que acondiciona la energía del panel solar. El robot es un vehículo de tracción diferencial, dirigido mediante el cambio de velocidad de sus ruedas izquierda y derecha. La cadena de potencia incluye un panel fotovoltaico comercial, convertidores que transforman la salida del panel en una tensión utilizable para los motores y motores de corriente continua en cada rueda. Al modelar todas estas piezas con ecuaciones realistas, el equipo puede predecir cómo responde la máquina completa cuando cambia la luz solar o varían los parámetros internos.
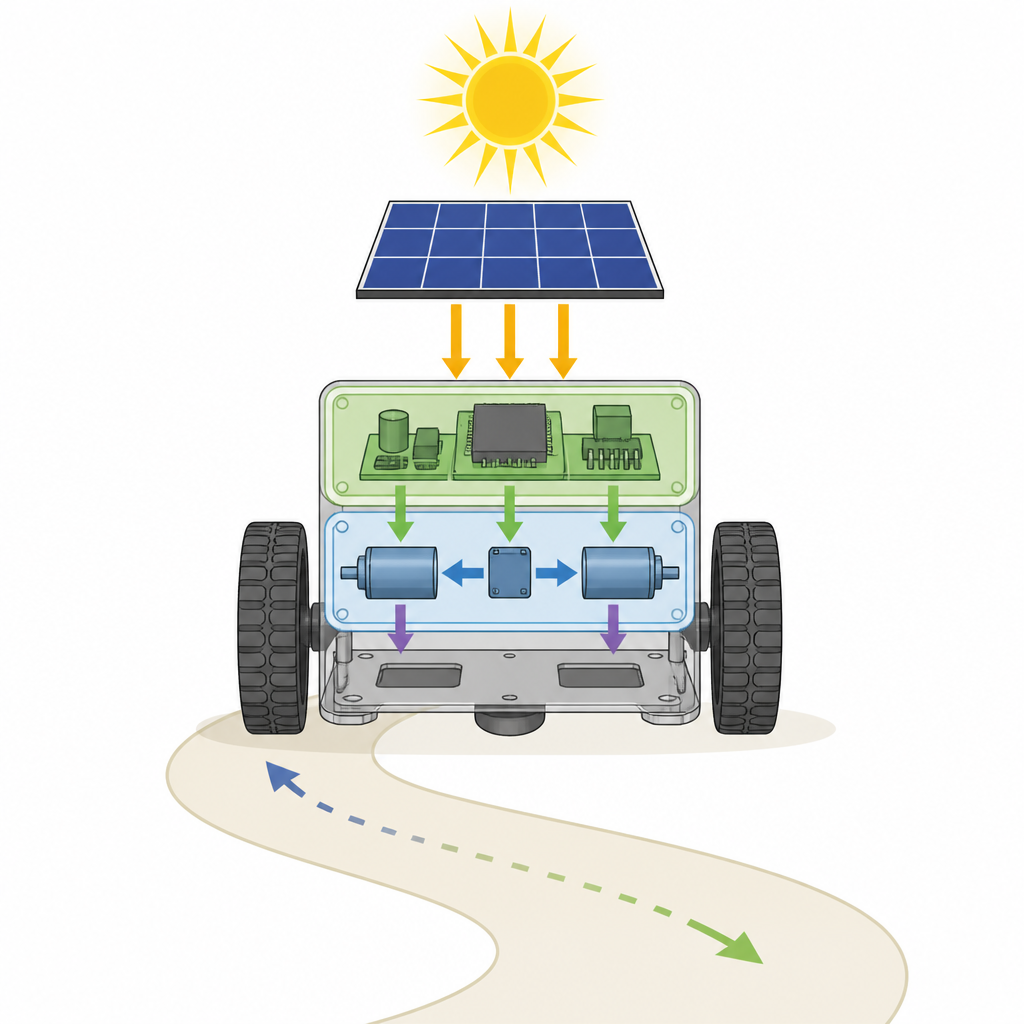
Un sistema de decisión de tres capas
El controlador propuesto funciona como un sistema de decisión de tres capas apiladas de arriba abajo. En la capa superior, una capa de planificación de movimiento compara la posición y la orientación reales del robot con una trayectoria deseada y calcula velocidades objetivo para las ruedas que pueden ser positivas o negativas, permitiendo un verdadero movimiento hacia adelante y hacia atrás. Una segunda capa convierte esos objetivos de velocidad en par y luego en corrientes de motor, usando reglas proporcionales e integrales simples para mantener las corrientes medidas cercanas a sus objetivos. En la parte inferior, una capa de conmutación ajusta rápidamente los convertidores electrónicos que se interponen entre el panel solar y los motores. Esta capa emplea una combinación de acciones deslizantes e integrales para modelar la tensión de salida de modo que los motores vean las condiciones eléctricas correctas a pesar de las oscilaciones en la tensión del panel.
Pruebas bajo luz cambiante
Para evaluar el rendimiento, los investigadores construyen una simulación detallada en MATLAB y Simscape, que incluye un módulo solar real, modelos de motor realistas y circuitos convertidores. Programan una trayectoria suave que hace que el robot avance y luego retroceda por un bucle, mientras el sol virtual sigue dos patrones diferentes. En un caso, la irradiancia sube y baja como en un día despejado. En otro, la irradiancia cae abruptamente, con ruido añadido que imita nubes y parpadeo. El equipo también modifica componentes eléctricos clave a mitad de ejecución para imitar envejecimiento o cambios de temperatura. En todas estas condiciones, el nuevo controlador mantiene los errores de posición y orientación del robot extremadamente pequeños, del orden de unos pocos milésimos de metro y una fracción mínima de radián.
Comparación con métodos anteriores
Los autores comparan su diseño con un controlador previo de tres niveles que también consideraba el cuerpo del robot, los motores y la electrónica de potencia, pero solo permitía velocidades de motor en una única dirección. Cuando ambos controladores se piden seguir la misma trayectoria de ida y vuelta bajo luz variable, el método antiguo pierde rápidamente la ruta una vez que se necesitan velocidades negativas en las ruedas y sus errores crecen mucho. El nuevo controlador con conmutación, en contraste, mantiene un seguimiento preciso en ambas direcciones y se mantiene estable, lo que demuestra que el manejo explícito de tensiones motoras bidireccionales y del comportamiento de conmutación es crucial para los robots alimentados por energía solar.
Qué significa esto para futuros robots solares
Para un público no especialista, el mensaje principal es que es posible diseñar robots móviles alimentados por paneles solares que se desplacen con precisión por rutas complejas, tanto hacia adelante como hacia atrás, sin verse muy afectados por nubes pasajeras o cambios eléctricos internos. Al coordinar el cuerpo del robot, los motores y los circuitos de potencia en un esquema de control unificado, este trabajo sienta las bases para máquinas más fiables y conscientes de la energía que puedan patrullar granjas, inspeccionar infraestructuras o monitorizar el medio ambiente mientras consumen energía directamente del sol.
Cita: Reyes-Reyes, E., Ordaz-Dehesa, J.C., Rodríguez-Cerón, J.R. et al. Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations. Sci Rep 16, 16188 (2026). https://doi.org/10.1038/s41598-026-47467-w
Palabras clave: robots solares, seguimiento de trayectoria, robots móviles, energías renovables, control de robots