Clear Sky Science · pl
Sterownik przełączający dla dwukierunkowego śledzenia toru w mobilnych robotach zasilanych PV z uwzględnieniem wszystkich ich podsystemów i zmian nasłonecznienia
Roboty zasilane światłem słonecznym
Wyobraź sobie małego robota kołowego patrolującego pole lub teren przemysłowy przez cały dzień, zasilanego wyłącznie słońcem i zdolnego poruszać się zarówno do przodu, jak i do tyłu po zaplanowanej trasie bez zbaczania z kursu. W tym badaniu autorzy badają, jak wyposażyć takie roboty w „mózg” i odruchy pozwalające utrzymać kurs, nawet gdy przechodzące chmury lub zakłócenia elektryczne zaburzają dostawę energii.
Dlaczego roboty słoneczne trudno kontrolować
Panele fotowoltaiczne nie dostarczają stabilnej mocy. Ich napięcie i prąd zmieniają się wraz z natężeniem światła, zacienieniem, temperaturą i starzeniem. Dla robota oznacza to, że silniki mogą nagle otrzymać więcej lub mniej energii niż przewidywano. Wiele wcześniejszych systemów sterowania traktowało konstrukcję robota, jego silniki i elektronikę zasilającą jako oddzielne elementy lub upraszczało model etapu zasilania. W rezultacie często działały one tylko w jednym kierunku jazdy lub w warunkach idealnego oświetlenia i mogły zawieść przy gwałtownych zmianach nasłonecznienia.
Połączenie wszystkich podsystemów w jedną całość
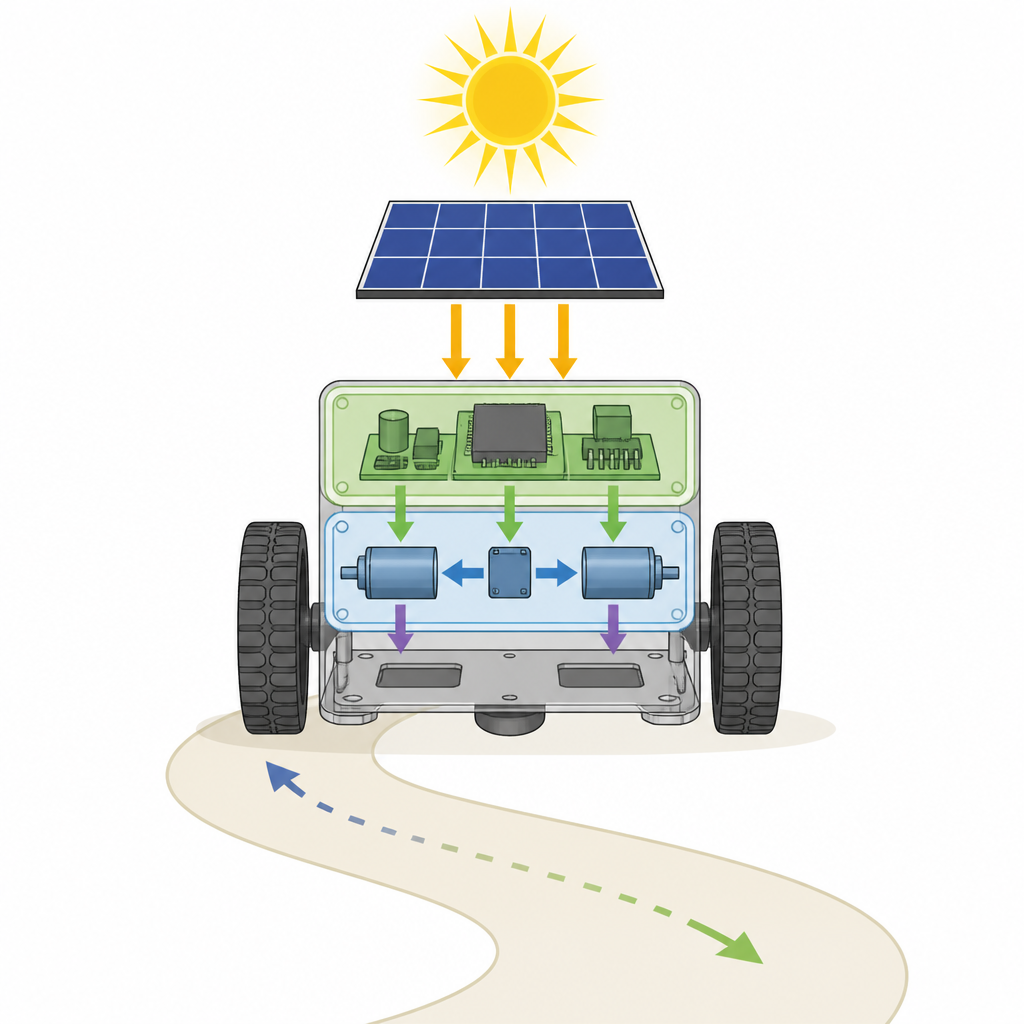
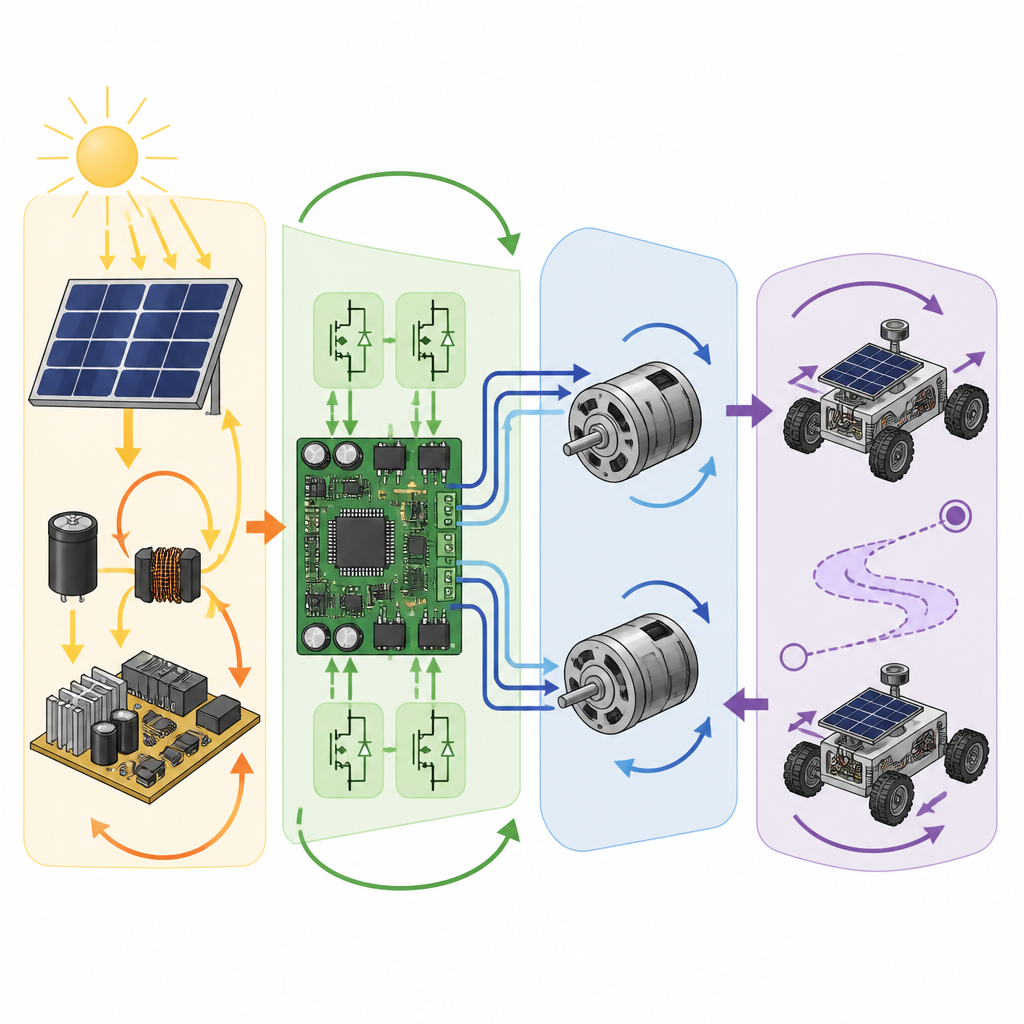
W tej pracy autorzy projektują jeden schemat sterowania, który spina trzy główne części robota kołowego: mechaniczny podwozie i koła, silniki elektryczne napędzające te koła oraz elektronikę kształtującą moc z panelu słonecznego. Robot to pojazd z napędem różnicowym, sterowany przez zmianę prędkości lewego i prawego koła. Łańcuch zasilania obejmuje komercyjny moduł fotowoltaiczny, przetwornice przekształcające wyjście panelu na użyteczne napięcie silników oraz silniki prądu stałego zamontowane przy każdym kole. Modelując wszystkie te elementy za pomocą realistycznych równań, zespół potrafi przewidzieć, jak cała maszyna zareaguje przy zmianach nasłonecznienia i parametrów wewnętrznych.
Trójwarstwowy system decyzyjny
Proponowany sterownik działa jak trójwarstwowy system decyzyjny, ułożony od góry do dołu. Na górze warstwa planowania ruchu porównuje rzeczywistą pozycję i kierunek robota z zadaną ścieżką i oblicza docelowe prędkości kół, które mogą być dodatnie lub ujemne, umożliwiając rzeczywisty ruch w obu kierunkach. Druga warstwa konwertuje te cele prędkości na momenty obrotowe, a następnie na prądy silników, stosując proste proporcjonalno-całkujące reguły, by mierzone prądy pozostawały blisko zadanych wartości. Na dole znajduje się warstwa przełączająca, która szybko dostosowuje przetwornice elektroniczne między panelem słonecznym a silnikami. Ta warstwa wykorzystuje mieszankę działań ślizgowych i całkujących, aby kształtować napięcie wyjściowe tak, by silniki otrzymywały odpowiednie warunki elektryczne mimo wahań napięcia panelu.
Testy przy zmieniającym się nasłonecznieniu
Aby ocenić działanie, badacze zbudowali szczegółową symulację w MATLAB i Simscape, obejmującą rzeczywisty moduł słoneczny, realistyczne modele silników i obwody przetwornic. Zaprogramowali gładką trajektorię, która powoduje, że robot najpierw jedzie do przodu, a następnie cofa się po pętli, podczas gdy wirtualne słońce podąża dwoma różnymi wzorcami. W jednym przypadku natężenie promieniowania wzrasta i maleje jak w pogodny dzień. W drugim natężenie spada gwałtownie, z dodanym szumem naśladującym chmury i migotanie. Zespół także zmieniał kluczowe komponenty elektryczne w trakcie przebiegu, aby imitować starzenie lub zmiany temperatury. We wszystkich tych warunkach nowy sterownik utrzymywał błędy pozycji i kursu na bardzo niskim poziomie, rzędu kilku tysięcznych metra i ułamka radiana.
Jak to wypada na tle wcześniejszych metod
Autorzy porównali swój projekt z wcześniejszym trójpoziomowym sterownikiem, który również uwzględniał kadłub robota, silniki i elektronikę zasilającą, lecz dopuszczał prędkości silników tylko w jednym kierunku. Gdy obydwa sterowniki miały śledzić tę samą trasę tam i z powrotem przy zmiennym nasłonecznieniu, starsza metoda szybko traciła tor, gdy wymagane były ujemne prędkości kół, a jej błędy szybko rosły. Nowy sterownik przełączający, w przeciwieństwie do tego, utrzymywał dokładne śledzenie w obu kierunkach i zachowywał stabilność, pokazując, że jawne uwzględnienie dwukierunkowych napięć silników i zachowań przełączających jest kluczowe dla robotów zasilanych energią słoneczną.
Co to oznacza dla przyszłych robotów słonecznych
Dla osoby niezwiązanej z tematem główne przesłanie jest takie, że możliwe jest zaprojektowanie robotów mobilnych zasilanych z paneli słonecznych, które poruszają się precyzyjnie po skomplikowanych trasach, zarówno do przodu, jak i do tyłu, nie będąc znacząco zakłócanymi przez przechodzące chmury czy wewnętrzne zmiany elektryczne. Koordynując kadłub robota, silniki i obwody zasilające w jednym zunifikowanym schemacie sterowania, praca ta tworzy podstawy pod bardziej niezawodne, świadome energetycznie maszyny, które mogą patrolować farmy, inspekcje infrastruktury czy monitorować środowisko, czerpiąc moc bezpośrednio ze słońca.
Cytowanie: Reyes-Reyes, E., Ordaz-Dehesa, J.C., Rodríguez-Cerón, J.R. et al. Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations. Sci Rep 16, 16188 (2026). https://doi.org/10.1038/s41598-026-47467-w
Słowa kluczowe: roboty słoneczne, śledzenie trajektorii, roboty mobilne, energia odnawialna, sterowanie robotem