Clear Sky Science · nl
Dynamische schakelaarcontroller voor bidirectionele trajectvolging in door PV aangedreven mobiele robots, rekening houdend met alle subsystemen en variaties in instraling
Robots die op zonlicht werken
Stel je een kleine wieltjesrobot voor die de hele dag een veld of industrieterrein patrouilleert, uitsluitend aangedreven door de zon, en die zowel vooruit als achteruit langs een gepland pad kan bewegen zonder van koers te raken. Deze studie onderzoekt hoe je zulke zongevoede robots de logica en reflexen kunt geven die nodig zijn om op koers te blijven, zelfs wanneer voorbijtrekkende wolken of elektrische storingen de stroomvoorziening verstoren.
Waarom zonne-robots moeilijk te besturen zijn
Zonnepanelen leveren geen constante stroom. Hun spanning en stroomsterkte stijgen en dalen met zonlicht, schaduwen, temperatuur en veroudering. Voor een robot betekent dat dat de motoren plotseling meer of minder energie kunnen krijgen dan verwacht. Veel eerdere regelsystemen beschouwden het robotlichaam, de motoren en de vermogenselektronica als losse onderdelen, of ze vereenvoudigden het gedrag van de voedingsfase. Daardoor werkten ze vaak alleen in één rijsrichting of onder ideale lichtomstandigheden, en faalden ze wanneer de zoninstraling snel veranderde.
Alle subsystemen onder één dak brengen
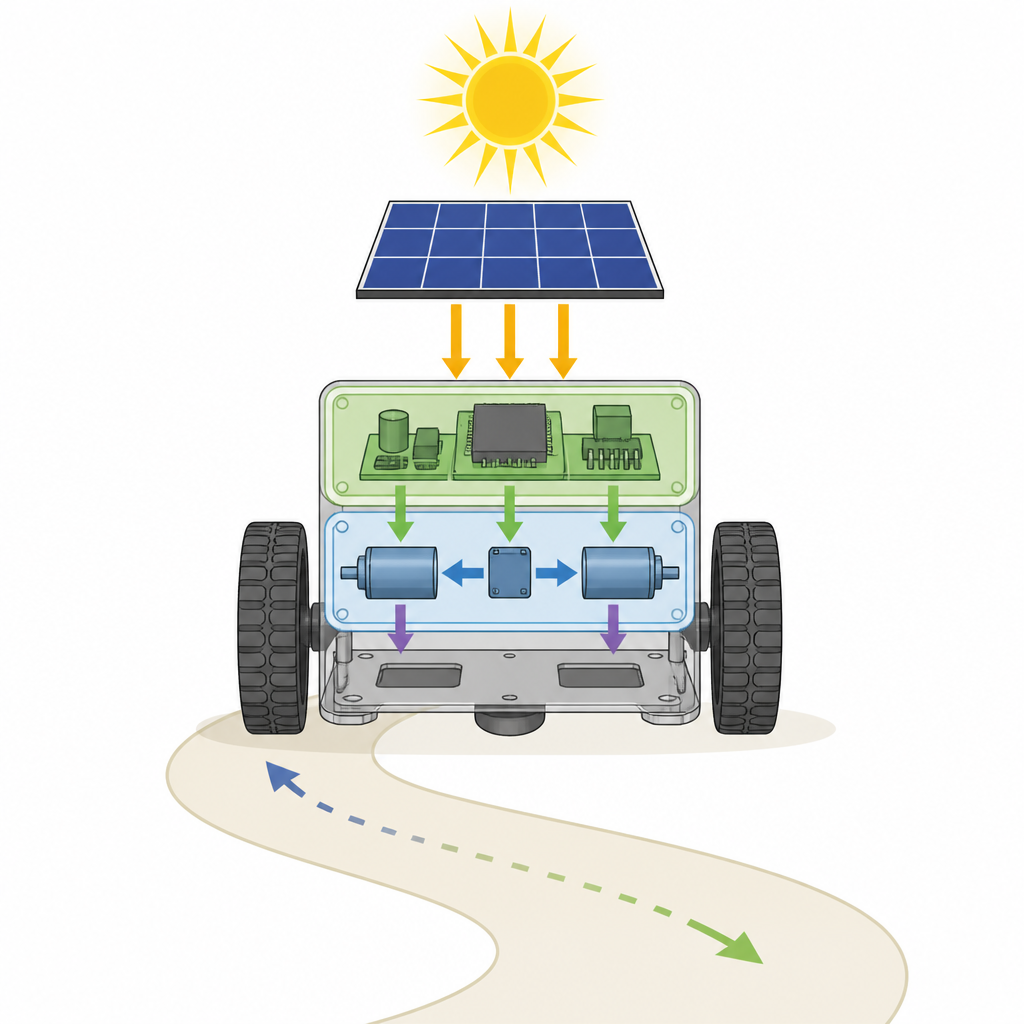
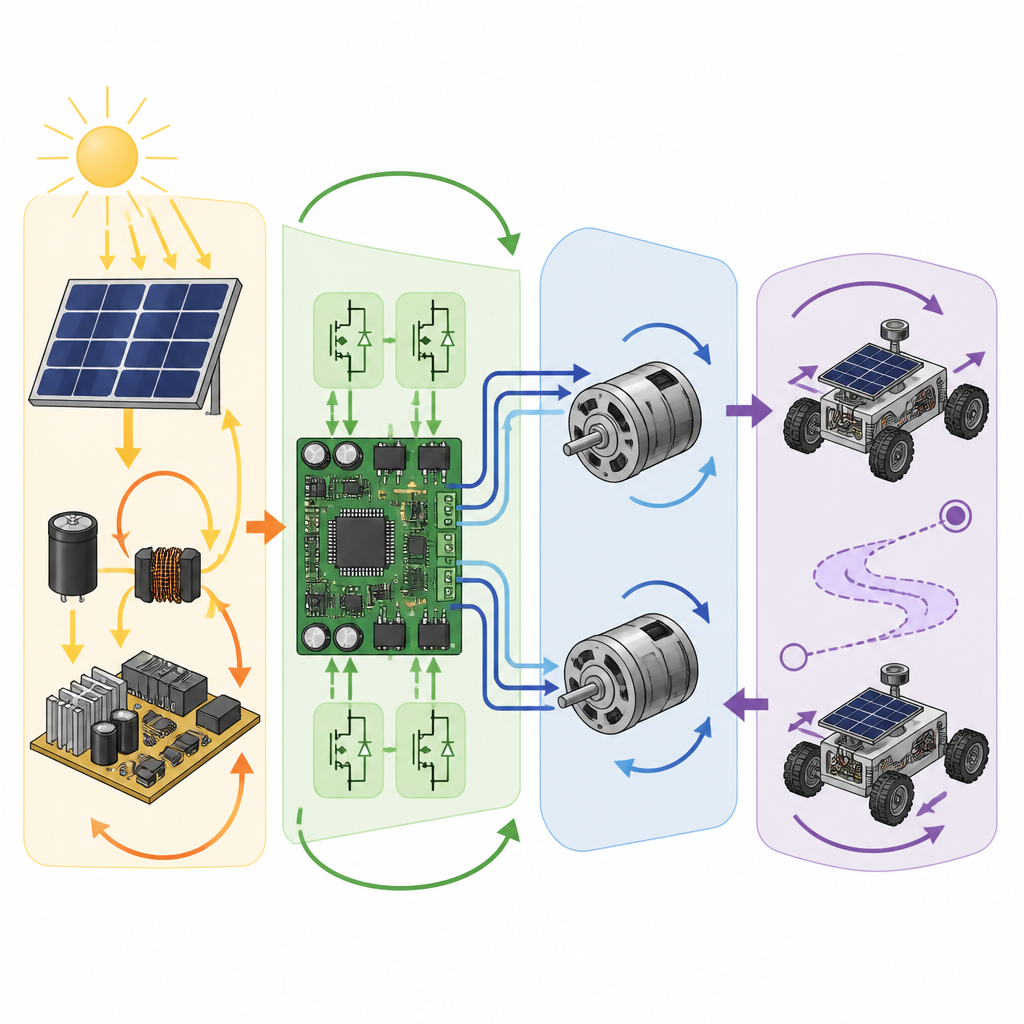
In dit werk ontwerpen de auteurs één enkel regelschema dat de drie hoofdonderdelen van een wieltjesrobot samenbrengt: het mechanische chassis en de wielen, de elektrische motoren die die wielen aandrijven, en de elektronica die vermogen uit het zonnepaneel vormt. De robot is een differentieel aangedreven voertuig, gestuurd door het veranderen van de snelheid van het linker- en rechterwiel. De vermogensketen bevat een commercieel fotovoltaïsch paneel, omzetters die de paneeluitgang naar bruikbare motorspanning brengen, en gelijkstroommotoren op elk wiel. Door al deze onderdelen met realistische vergelijkingen te modelleren, kan het team voorspellen hoe het hele apparaat reageert wanneer de zoninstraling en interne parameters veranderen.
Een driedelige beslissingslaag
De voorgestelde controller werkt als een driedelig beslissingssysteem, gestapeld van boven naar beneden. Bovenaan vergelijkt een bewegingsplanningslaag de werkelijke positie en oriëntatie van de robot met een gewenst pad en berekent doelwielsnelheden die positief of negatief kunnen zijn, waardoor echt heen en weer bewegen mogelijk is. Een tweede laag zet die snelheidsdoelen om in koppel en vervolgens in motorstromen, met eenvoudige proportionele en integrerende regels om gemeten stromen dicht bij hun doelen te houden. Onderaan past een schakellaag snel de elektronische omzetters aan die tussen het zonnepaneel en de motoren zitten. Deze laag gebruikt een mix van sliding- en integrale acties om de uitgangsspanning te vormen, zodat de motoren de juiste elektrische omstandigheden zien ondanks schommelingen in de paneelspanning.
Testen onder veranderend zonlicht
Om de prestaties te evalueren bouwen de onderzoekers een gedetailleerde simulatie in MATLAB en Simscape, inclusief een echt zonnepaneel, realistische motormodellen en omzettercircuits. Ze programmeren een vloeiend pad waarmee de robot vooruitgaat en vervolgens achteruit langs een lus, terwijl de virtuele zon twee verschillende patronen volgt. In het ene geval stijgt en daalt de instraling zoals op een heldere dag. In het andere geval valt de instraling abrupt weg, met extra ruis die wolken en flikkering nabootst. Het team verandert ook belangrijke elektrische componenten halverwege de rit om veroudering of temperatuurverschuivingen te imiteren. In al deze omstandigheden houdt de nieuwe controller de positie- en oriëntatiefouten van de robot uiterst klein, op de orde van enkele duizendsten van een meter en een klein deel van een radiaal.
Hoe het zich verhoudt tot eerdere methoden
De auteurs vergelijken hun ontwerp met een eerdere driedelige controller die ook het robotlichaam, de motoren en de vermogenselektronica in overweging nam, maar alleen motorrsnelheden in één richting toestond. Wanneer beide controllers gevraagd worden hetzelfde heen-en-weer pad te volgen onder wisselende zoninstraling, verliest de oudere methode snel het spoor zodra negatieve wielsnelheden nodig zijn, en groeien de fouten sterk. De nieuwe schakelaarcontroller daarentegen behoudt nauwkeurige tracking in beide richtingen en blijft stabiel, wat aantoont dat expliciete behandeling van bidirectionele motorspanningen en schakelgedrag cruciaal is voor door zonne-energie aangedreven robots.
Wat dit betekent voor toekomstige zonne-robots
Voor de niet-specialist is de belangrijkste boodschap dat het mogelijk is om zongevoede mobiele robots te ontwerpen die nauwkeurig complexe routes afleggen, zowel vooruit als achteruit, zonder veel last te hebben van voorbijtrekkende wolken of interne elektrische veranderingen. Door het robotlichaam, de motoren en de vermogencircuits in één verenigd regelschema te coördineren, legt dit werk de basis voor betrouwbaardere, energiebewuste machines die akkers kunnen patrouilleren, infrastructuur kunnen inspecteren of het milieu kunnen monitoren terwijl ze rechtstreeks van de zon drinken.
Bronvermelding: Reyes-Reyes, E., Ordaz-Dehesa, J.C., Rodríguez-Cerón, J.R. et al. Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations. Sci Rep 16, 16188 (2026). https://doi.org/10.1038/s41598-026-47467-w
Trefwoorden: zonnrobots, trajectvolging, mobiele robots, hernieuwbare energie, robotbesturing