Clear Sky Science · fr
Contrôleur à commutation dynamique pour le suivi de trajectoire bidirectionnel de robots mobiles alimentés par PV en tenant compte de tous leurs sous-systèmes et des variations d’irradiance
Des robots alimentés par la lumière du soleil
Imaginez un petit robot à roues patrouillant toute la journée un champ ou un site industriel, alimenté uniquement par le soleil, capable de se déplacer en avant et en arrière le long d’un trajet planifié sans dévier. Cette étude examine comment doter ces robots solaires des capacités de décision et de réaction nécessaires pour rester sur leur trajectoire, même lorsque des nuages passants ou des perturbations électriques affectent leur alimentation.
Pourquoi il est difficile de contrôler des robots solaires
Les panneaux solaires ne fournissent pas une puissance stable. Leur tension et leur courant varient avec l’ensoleillement, les ombres, la température et le vieillissement. Pour un robot, cela signifie que les moteurs peuvent recevoir subitement plus ou moins d’énergie que prévu. De nombreux systèmes de contrôle antérieurs traitaient la structure mécanique, les moteurs et l’électronique d’alimentation comme des éléments séparés, ou simplifiaient le comportement de l’étage d’alimentation. En conséquence, ils ne fonctionnaient souvent que dans un seul sens de roulage ou sous un éclairage idéal, et pouvaient échouer lorsque l’ensoleillement variait rapidement.
Rassembler tous les sous-systèmes sous une même approche
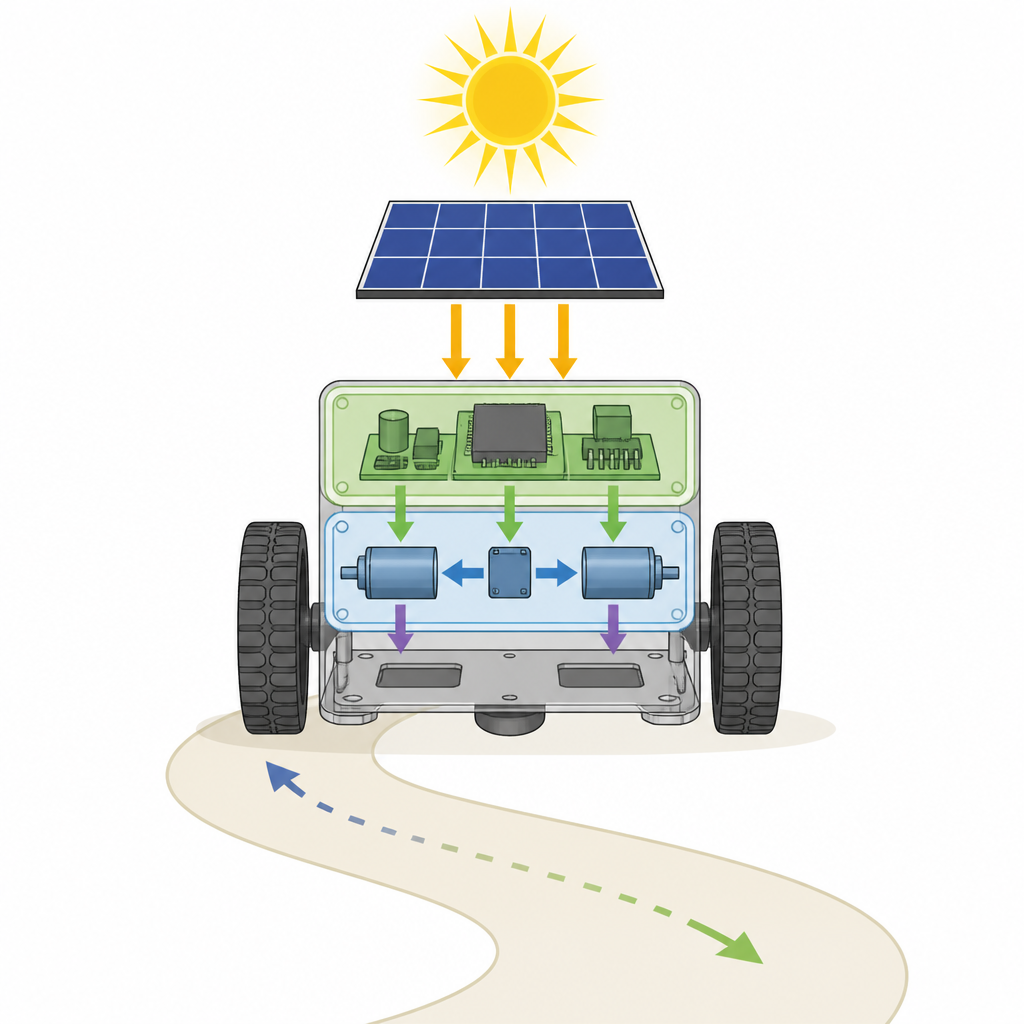
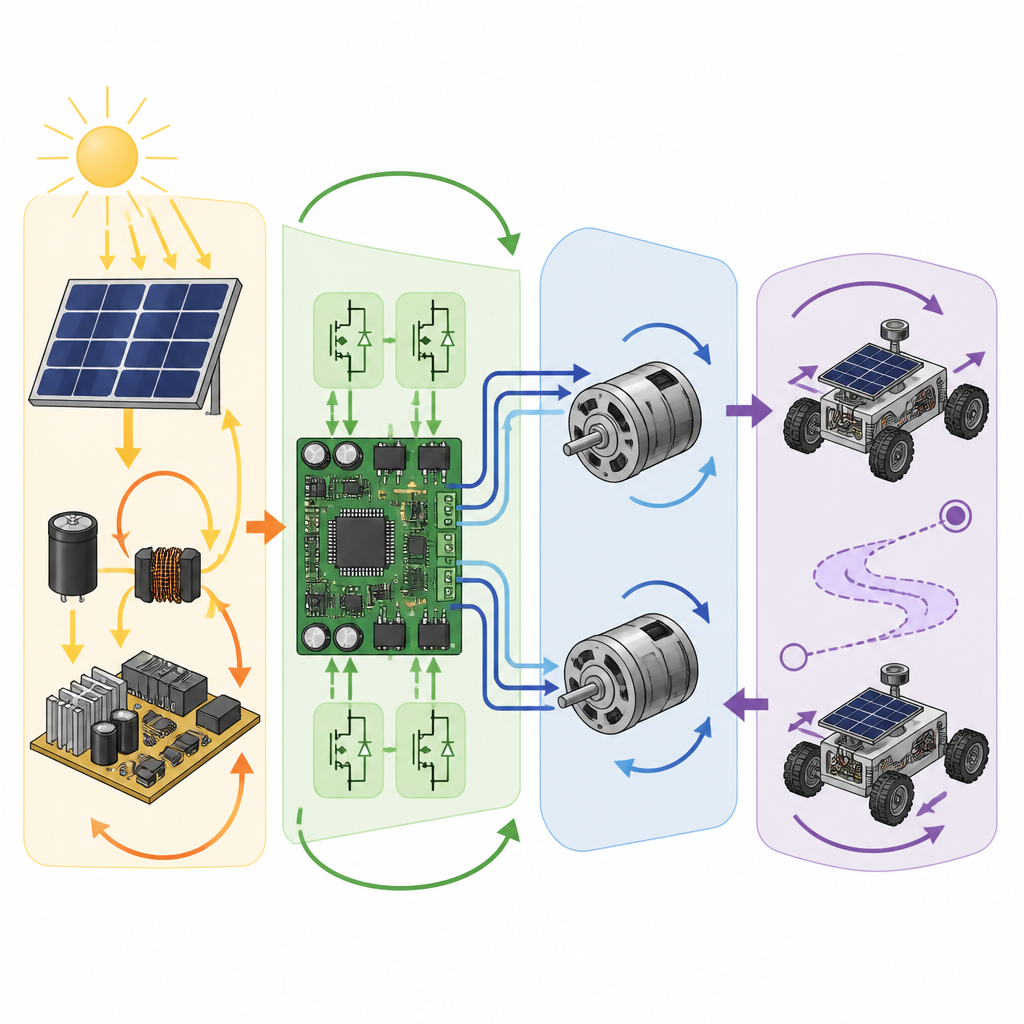
Dans ce travail, les auteurs conçoivent une seule stratégie de contrôle qui relie les trois parties principales d’un robot à roues : le châssis mécanique et les roues, les moteurs électriques qui font tourner ces roues, et l’électronique qui conditionne la puissance issue du panneau solaire. Le robot est un véhicule à entraînement différentiel, dirigé en variant la vitesse des roues gauche et droite. La chaîne d’alimentation comprend un panneau photovoltaïque commercial, des convertisseurs qui adaptent la sortie du panneau en une tension exploitable pour les moteurs, et des moteurs à courant continu sur chaque roue. En modélisant chacune de ces parties par des équations réalistes, l’équipe peut prédire la réponse globale de la machine quand l’ensoleillement et les paramètres internes changent.
Un système de décision en trois couches
Le contrôleur proposé fonctionne comme un système de décision à trois couches empilées de haut en bas. Au sommet, une couche de planification de mouvement compare la position et l’orientation réelles du robot avec la trajectoire désirée et calcule des vitesses cibles pour les roues qui peuvent être positives ou négatives, autorisant un véritable va-et-vient. Une seconde couche convertit ces objectifs de vitesse en couple puis en courants moteurs, en utilisant des lois proportionnelles et intégrales simples pour maintenir les courants mesurés proches de leurs consignes. À la base, une couche de commutation ajuste rapidement les convertisseurs électroniques situés entre le panneau solaire et les moteurs. Cette couche utilise un mélange d’actions de glissement et d’action intégrale pour façonner la tension de sortie afin que les moteurs voient les bonnes conditions électriques malgré les fluctuations de la tension du panneau.
Tests sous un ensoleillement variable
Pour évaluer les performances, les chercheurs ont construit une simulation détaillée sous MATLAB et Simscape, incluant un module solaire réel, des modèles moteurs réalistes et des circuits de conversion. Ils programment une trajectoire fluide qui fait avancer le robot, puis reculer en boucle, tandis que le soleil virtuel suit deux profils différents. Dans un cas, l’irradiance augmente et décroît comme lors d’une journée claire. Dans l’autre, l’irradiance chute brusquement, avec du bruit ajouté qui imite des nuages et des scintillements. L’équipe modifie aussi des composants électriques clés en cours d’essai pour imiter le vieillissement ou des variations de température. Dans toutes ces conditions, le nouveau contrôleur maintient les erreurs de position et d’orientation extrêmement faibles, de l’ordre de quelques millièmes de mètre et d’une infime fraction de radian.
Comparaison avec des méthodes antérieures
Les auteurs comparent leur conception à un contrôleur à trois niveaux précédent qui considérait également le corps du robot, les moteurs et l’électronique d’alimentation, mais qui n’autorisait les vitesses moteurs que dans un seul sens. Lorsque les deux contrôleurs tentent de suivre la même trajectoire aller-retour sous un ensoleillement variable, la méthode ancienne perd rapidement la trajectoire dès que des vitesses négatives sont requises, et ses erreurs s’accroissent fortement. Le nouveau contrôleur à commutation, en revanche, maintient un suivi précis dans les deux sens et reste stable, montrant que la prise en compte explicite des tensions moteurs bidirectionnelles et du comportement de commutation est cruciale pour les robots solaires.
Ce que cela signifie pour les futurs robots solaires
Pour un non-spécialiste, le message principal est qu’il est possible de concevoir des robots mobiles alimentés par le solaire qui se déplacent avec précision le long de trajectoires complexes, en avant comme en arrière, sans être fortement perturbés par des nuages passants ou des variations électriques internes. En coordonnant le corps du robot, les moteurs et les circuits d’alimentation au sein d’un schéma de contrôle unifié, ce travail jette les bases de machines plus fiables et économes en énergie pouvant patrouiller des fermes, inspecter des infrastructures ou surveiller l’environnement tout en puisant directement leur énergie dans le soleil.
Citation: Reyes-Reyes, E., Ordaz-Dehesa, J.C., Rodríguez-Cerón, J.R. et al. Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations. Sci Rep 16, 16188 (2026). https://doi.org/10.1038/s41598-026-47467-w
Mots-clés: robots solaires, suivi de trajectoire, robots mobiles, énergie renouvelable, contrôle robotique