Clear Sky Science · de
Dynamischer Schaltregler für bidirektionales Trajektorien-Tracking bei photovoltaisch betriebenen mobilen Robotern unter Berücksichtigung aller Teilsysteme und Strahlungsänderungen
Roboter, die von Sonnenlicht angetrieben werden
Stellen Sie sich einen kleinen Radroboter vor, der tagsüber ein Feld oder ein Industriegelände überwacht, ausschließlich von der Sonne angetrieben wird und sich entlang eines geplanten Pfads sowohl vorwärts als auch rückwärts bewegen kann, ohne vom Kurs abzukommen. Diese Studie untersucht, wie man solchen solar gespeisten Robotern die nötige Intelligenz und Reflexe verleiht, damit sie auf Kurs bleiben, selbst wenn vorbeiziehende Wolken oder elektrische Störungen ihre Energieversorgung beeinträchtigen.
Warum Solarroboter schwer zu steuern sind
Solarmodule liefern keine konstante Leistung. Ihre Spannung und ihr Strom schwanken mit Sonneneinstrahlung, Schatten, Temperatur und Alterung. Für einen Roboter bedeutet das, dass die Motoren plötzlich mehr oder weniger Energie erhalten können als erwartet. Viele frühere Steuerungssysteme behandelten die mechanische Struktur, die Motoren und die Leistungselektronik als getrennte Komponenten oder vereinfachten das Verhalten der Leistungsstufe. Infolgedessen funktionierten sie oft nur in einer Fahrtrichtung oder unter idealen Lichtbedingungen und konnten versagen, wenn sich die Sonneneinstrahlung schnell änderte.
Alle Teilsysteme unter einem Dach
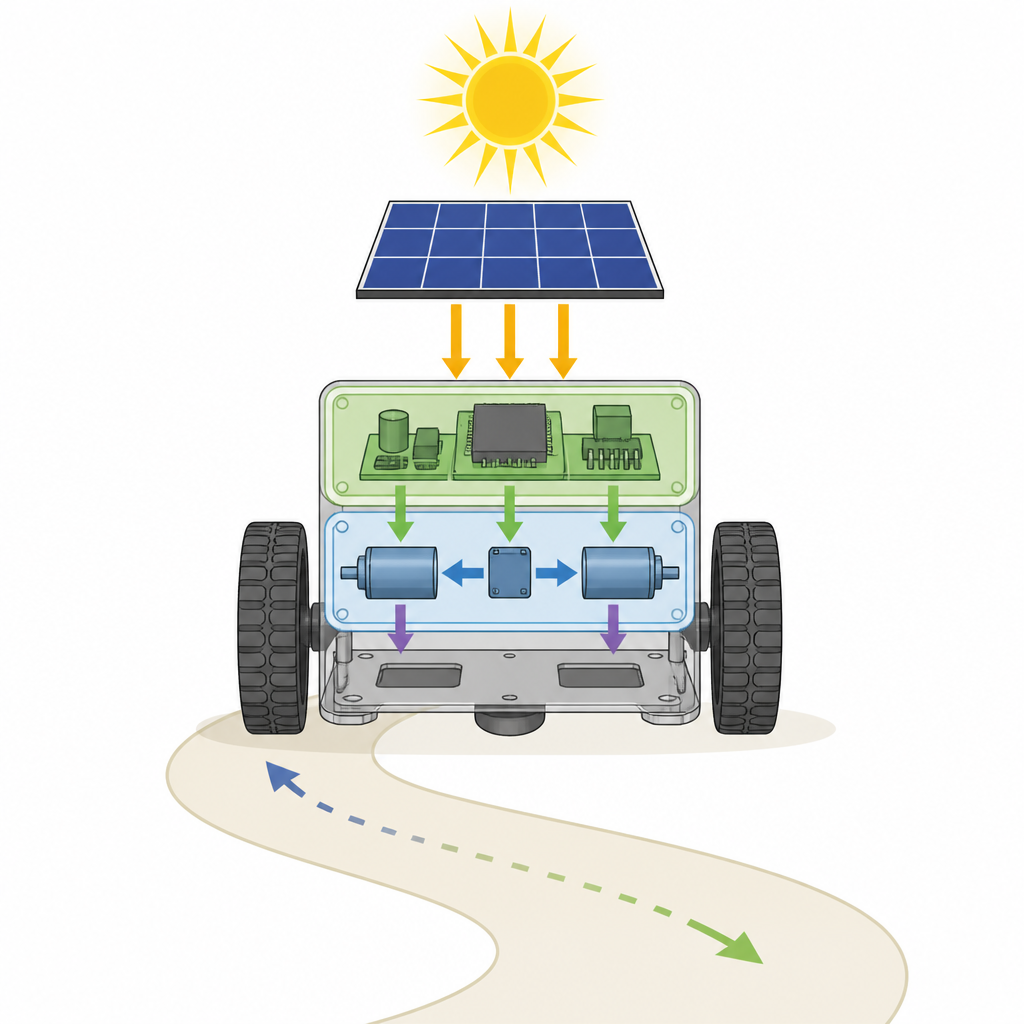
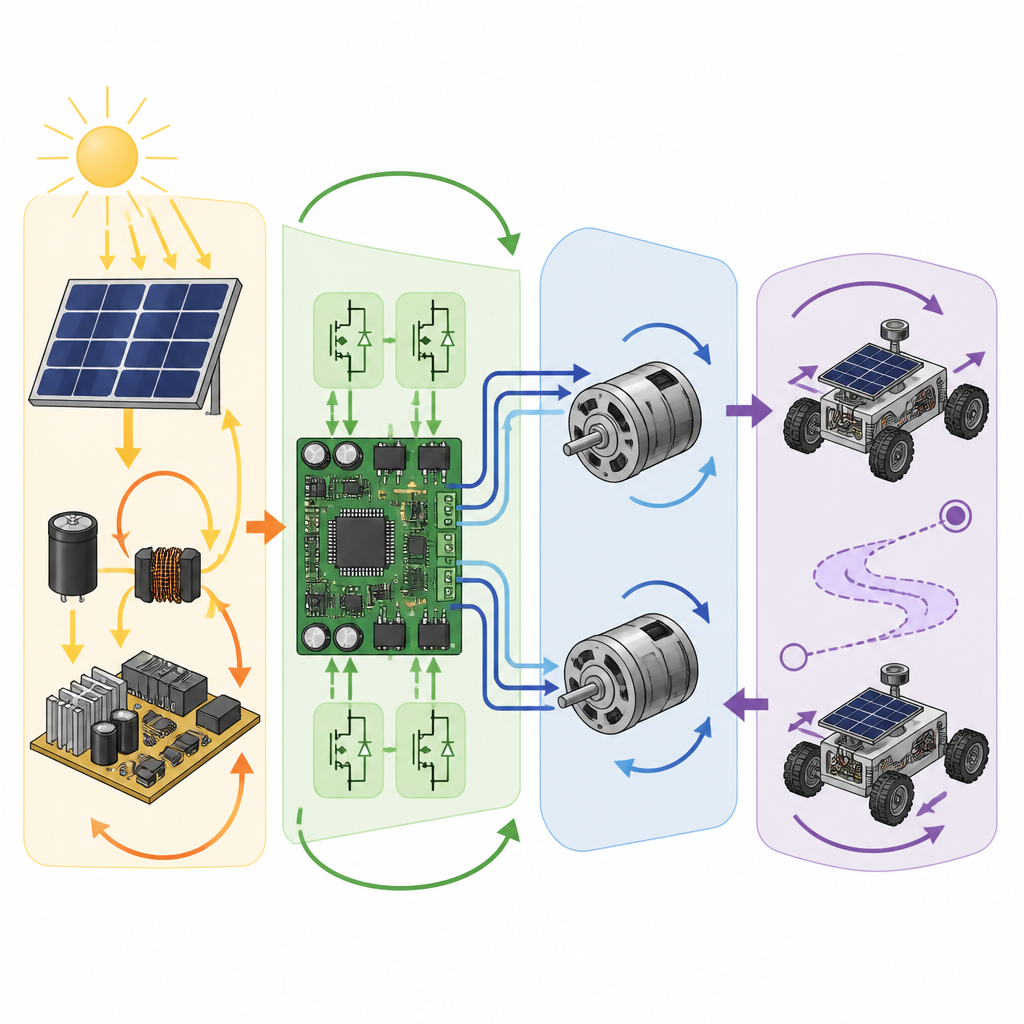
In dieser Arbeit entwerfen die Autoren ein einheitliches Steuerungsschema, das die drei Hauptteile eines Radroboters verknüpft: das mechanische Fahrgestell und die Räder, die Elektromotoren, die diese Räder antreiben, und die Elektronik, die die Energie des Solarmoduls aufbereitet. Der Roboter ist ein Differentialfahrzeug, das durch Änderung der Geschwindigkeit von links und rechts gelenkt wird. Die Leistungsstruktur umfasst ein kommerzielles Photovoltaikmodul, Wandler, die die Modulspannung in nutzbare Motorspannung umsetzen, und Gleichstrommotoren an jedem Rad. Durch die Modellierung all dieser Teile mit realistischen Gleichungen kann das Team vorhersagen, wie die gesamte Maschine reagiert, wenn sich Sonneneinstrahlung und interne Parameter ändern.
Ein dreischichtiges Entscheidungssystem
Der vorgeschlagene Regler arbeitet wie ein dreischichtiges Entscheidungssystem, gestapelt von oben nach unten. Oben vergleicht eine Bewegungsplanungsschicht die tatsächliche Position und Ausrichtung des Roboters mit einer gewünschten Bahn und berechnet Zielradgeschwindigkeiten, die positiv oder negativ sein können und echtes Vor- und Zurückfahren erlauben. Eine zweite Schicht wandelt diese Geschwindigkeitsziele in Drehmoment und dann in Motorströme um, wobei einfache proportionale und integrale Regeln angewandt werden, um gemessene Ströme nahe den Sollwerten zu halten. Unten passt eine Schalt-Schicht schnell die elektronischen Wandler an, die zwischen dem Solarmodul und den Motoren sitzen. Diese Schicht nutzt eine Mischung aus Sliding- und Integralreglern, um die Ausgangsspannung so zu formen, dass die Motoren trotz Schwankungen der Modulspannung die richtigen elektrischen Bedingungen sehen.
Tests bei wechselnder Sonneneinstrahlung
Zur Bewertung der Leistung bauen die Forschenden eine detaillierte Simulation in MATLAB und Simscape auf, einschließlich eines realen Solarmoduls, realistischer Motormodelle und Wandler-Schaltungen. Sie programmieren eine glatte Bahn, die den Roboter vorwärts fahren lässt und ihn dann auf einer Schleife rückwärts führt, während die virtuelle Sonne zwei unterschiedliche Muster durchläuft. In einem Fall steigt und fällt die Einstrahlung wie an einem klaren Tag. In einem anderen fällt die Einstrahlung abrupt ab, ergänzt durch Rauschen, das Wolken und Flimmern imitiert. Das Team ändert außerdem während der Simulation zentrale elektrische Komponenten, um Alterung oder Temperaturverschiebungen nachzubilden. Unter all diesen Bedingungen hält der neue Regler die Positions- und Orientierungfehler des Roboters extrem klein, im Bereich einiger Tausendstel Meter und einem winzigen Bruchteil eines Radianten.
Wie er sich gegen frühere Methoden behauptet
Die Autoren vergleichen ihr Konzept mit einem früheren dreistufigen Regler, der ebenfalls Roboterkörper, Motoren und Leistungselektronik berücksichtigte, aber nur Motordrehzahlen in einer Richtung zuließ. Wenn beide Regler aufgefordert werden, unter wechselnder Sonneneinstrahlung denselben Hin- und Rückweg zu verfolgen, verliert die ältere Methode schnell die Spur, sobald negative Radgeschwindigkeiten erforderlich werden, und ihre Fehler wachsen stark an. Der neue Schaltregler hingegen hält die Verfolgung in beiden Richtungen präzise und bleibt stabil, was zeigt, dass die explizite Behandlung bidirektionaler Motorspannungen und Schaltverhalten für solarbetriebene Roboter entscheidend ist.
Was das für zukünftige Solarroboter bedeutet
Für Nicht-Fachleute ist die Hauptaussage, dass es möglich ist, solarbetriebene mobile Roboter so zu konstruieren, dass sie präzise komplexen Routen folgen, vorwärts und rückwärts, ohne sich stark von vorbeiziehenden Wolken oder inneren elektrischen Veränderungen stören zu lassen. Durch die Koordination von Roboterkörper, Motoren und Leistungsschaltungen in einem einheitlichen Steuerungsschema schafft diese Arbeit die Grundlage für zuverlässigere, energiebewusste Maschinen, die Felder patrouillieren, Infrastruktur inspizieren oder die Umwelt überwachen können, während sie ihre Energie direkt von der Sonne beziehen.
Zitation: Reyes-Reyes, E., Ordaz-Dehesa, J.C., Rodríguez-Cerón, J.R. et al. Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations. Sci Rep 16, 16188 (2026). https://doi.org/10.1038/s41598-026-47467-w
Schlüsselwörter: Solarroboter, Trajektorienverfolgung, mobile Roboter, erneuerbare Energie, Robotersteuerung