Clear Sky Science · ru
Контроллер с динамическим переключением для двунаправленного слежения за траекторией в мобильных роботах, питаемых от СЭП, с учётом всех подсистем и изменения освещённости
Роботы, питающиеся от солнца
Представьте себе небольшой колёсный робот, который весь день патрулирует поле или промплощадку, получая энергию только от солнца, и способен двигаться как вперёд, так и назад по заданному маршруту, не сбиваясь с курса. В этом исследовании показано, как наделить такие роботы «мозгом» и рефлексами, позволяющими им оставаться на траектории даже при появлении проходящих облаков или перебоях в питании.
Почему с солнечными роботами трудно управляться
Солнечные панели не дают стабильной мощности. Их напряжение и ток меняются в зависимости от освещённости, теней, температуры и старения. Для робота это означает, что моторы могут внезапно получать больше или меньше энергии, чем ожидалось. Многие ранние системы управления рассматривали корпус робота, моторы и силовую электронику как отдельные компоненты или упрощали поведение силового звена. В результате такие решения часто работали только в одном направлении движения или при идеальном освещении и могли давать сбой при быстром изменении солнечного света.
Объединение всех подсистем в единую схему
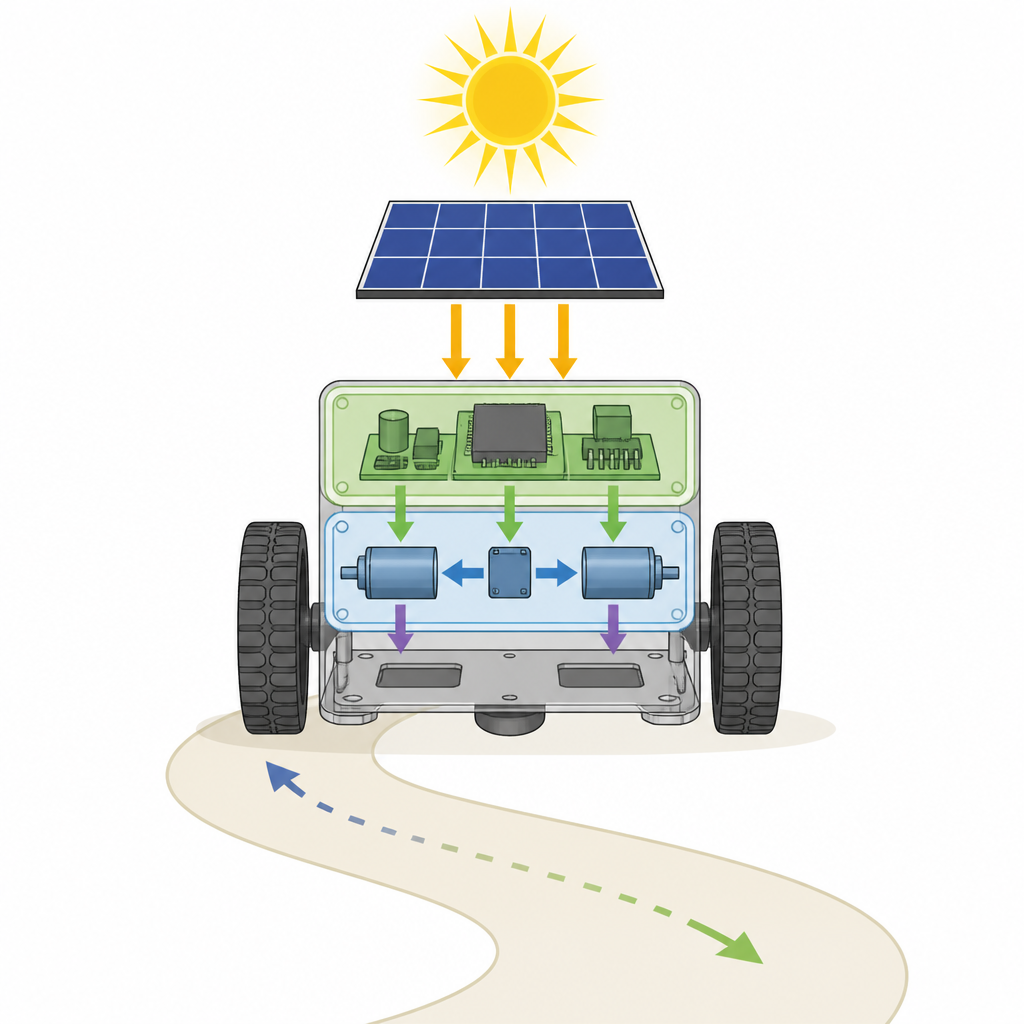
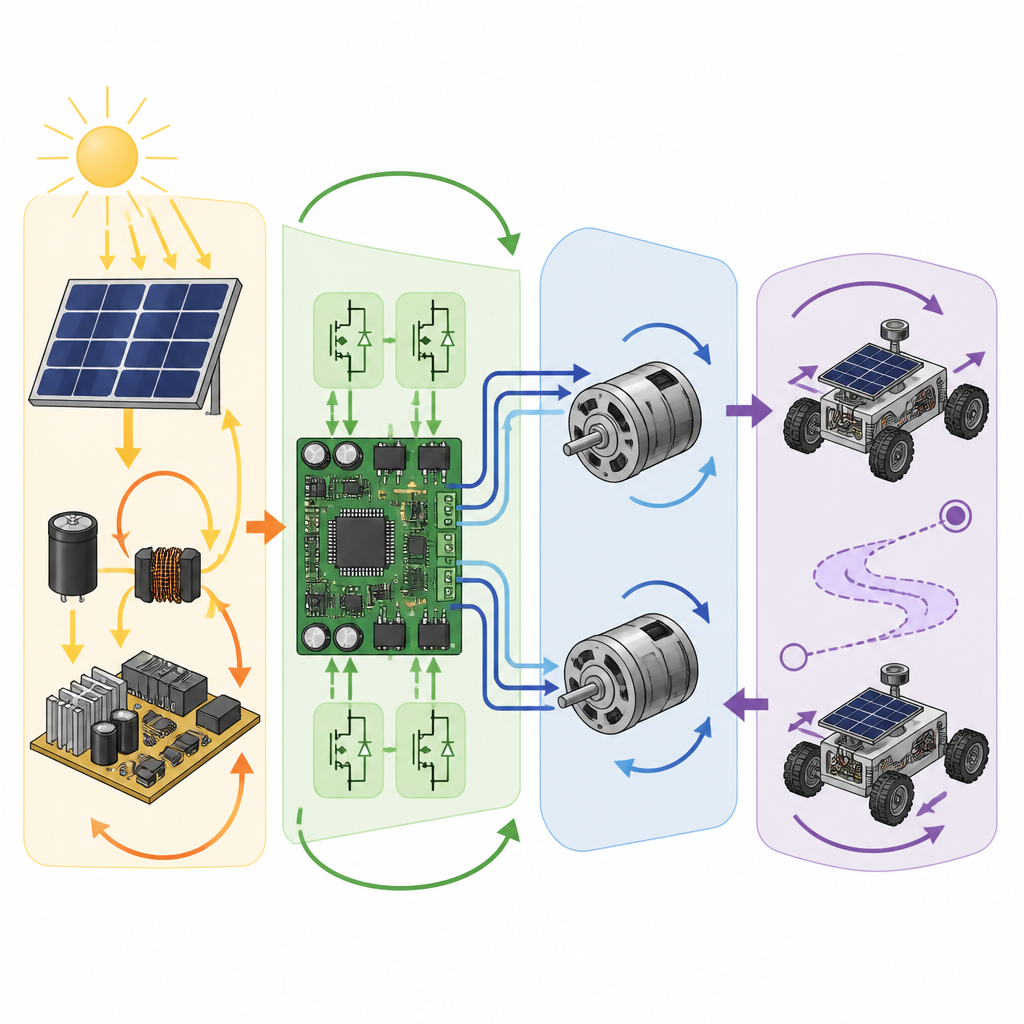
В этой работе авторы предлагают единый алгоритм управления, который связывает три главные части колёсного робота: механический шасси и колёса, электрические моторы, вращающие эти колёса, и электронику, формирующую питание от солнечной панели. Робот представляет собой дифференциальную платформу, управляемую изменением скорости левого и правого колёс. Силовой контур включает коммерческую фотогальваническую панель, преобразователи, которые превращают выход панели в пригодное для мотор-ов напряжение, и постоянные токовые двигатели на каждом колесе. Моделируя все эти части с реалистичными уравнениями, команда может предсказывать, как машина в целом реагирует на изменения освещённости и внутренних параметров.
Трёхслойная система принятия решений
Предложенный контроллер работает как трёхслойная система принятия решений, уложенная сверху вниз. На верхнем уровне слой планирования движения сравнивает фактическое положение и курс робота с желаемой траекторией и вычисляет целевые скорости колёс, которые могут быть положительными или отрицательными, что обеспечивает истинное движение туда и обратно. Второй уровень преобразует эти целевые скорости в крутящий момент, а затем в токи двигателей, используя простые пропорциональные и интегральные правила для того, чтобы измеряемые токи оставались близкими к заданным. На нижнем уровне слой переключения быстро настраивает электронные преобразователи, находящиеся между солнечной панелью и моторами. Этот уровень использует сочетание скользящих и интегральных действий для формирования выходного напряжения так, чтобы моторы видели корректные электрические условия несмотря на колебания напряжения панели.
Тестирование при изменяющемся освещении
Для оценки характеристик исследователи построили подробную модель в MATLAB и Simscape, включающую реальный солнечный модуль, реалистичные модели моторов и схемы преобразователей. Они запрограммировали плавный маршрут, который заставляет робота двигаться вперёд, а затем назад по петле, в то время как виртуальное солнце следует двум различным сценариям. В одном случае освещённость возрастает и падает как в ясный день. В другом случае освещённость резко падает, с добавленным шумом, имитирующим облака и мерцание. Команда также вносит изменения в ключевые электрические компоненты во время прогона, чтобы имитировать старение или температурные сдвиги. Во всех этих условиях новый контроллер поддерживает ошибки положения и курса робота чрезвычайно малыми — порядка нескольких тысячных метра и небольшой доли радиана.
Сравнение с предыдущими методами
Авторы сравнивают свою разработку с предыдущим трёхуровневым контроллером, который также учитывал корпус робота, моторы и силовую электронику, но допускал скорости моторов только в одном направлении. Когда оба контроллера просят следовать одному и тому же маршруту туда и обратно при меняющемся освещении, старый метод быстро теряет след, как только требуются отрицательные скорости колёс, и его ошибки сильно растут. Новый переключающий контроллер, напротив, сохраняет точное слежение в обоих направлениях и остаётся устойчивым, что демонстрирует: явная обработка двунаправленных напряжений мотор-ов и поведения переключения критична для роботов на солнечной энергии.
Что это означает для будущих солнечных роботов
Для неспециалиста основной вывод таков: возможно создать мобильные роботы, питающиеся от солнечной энергии, которые точно следуют сложным маршрутам как вперёд, так и назад, не испытывая значительных проблем при проходе облаков или внутренних электрических изменениях. Координируя корпус робота, моторы и силовые цепи в единой схеме управления, эта работа закладывает основу для более надёжных, энергосберегающих машин, которые могут патрулировать фермы, инспектировать инфраструктуру или мониторить окружающую среду, черпая энергию прямо от солнца.
Цитирование: Reyes-Reyes, E., Ordaz-Dehesa, J.C., Rodríguez-Cerón, J.R. et al. Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations. Sci Rep 16, 16188 (2026). https://doi.org/10.1038/s41598-026-47467-w
Ключевые слова: солнечные роботы, слежение за траекторией, мобильные роботы, возобновляемая энергия, управление роботами