Clear Sky Science · pt
Controlador de comutação dinâmica para rastreamento de trajetória bidirecional em robôs móveis alimentados por PV considerando todos os seus subsistemas e variações de irradiância
Robôs movidos pela luz do sol
Imagine um pequeno robô com rodas patrulhando um campo ou um local industrial o dia todo, alimentado apenas pelo sol, capaz de se mover tanto para frente quanto para trás ao longo de um trajeto planejado sem se desviar. Este estudo explora como dar a esses robôs solares o processamento e os reflexos necessários para manter-se na rota, mesmo quando nuvens passageiras ou oscilações elétricas perturbam seu fornecimento de energia.
Por que é difícil controlar robôs solares
Painéis solares não fornecem energia constante. Sua tensão e corrente sobem e descem com a iluminação, sombras, temperatura e envelhecimento. Para um robô, isso significa que os motores podem repentinamente receber mais ou menos energia do que o esperado. Muitos sistemas de controle anteriores tratavam a estrutura do robô, seus motores e a eletrônica de potência como partes separadas, ou simplificavam o comportamento da etapa de potência. Como resultado, frequentemente funcionavam apenas em uma direção de deslocamento ou sob iluminação ideal, e podiam falhar quando a insolação mudava rapidamente.
Integrando todos os subsistemas
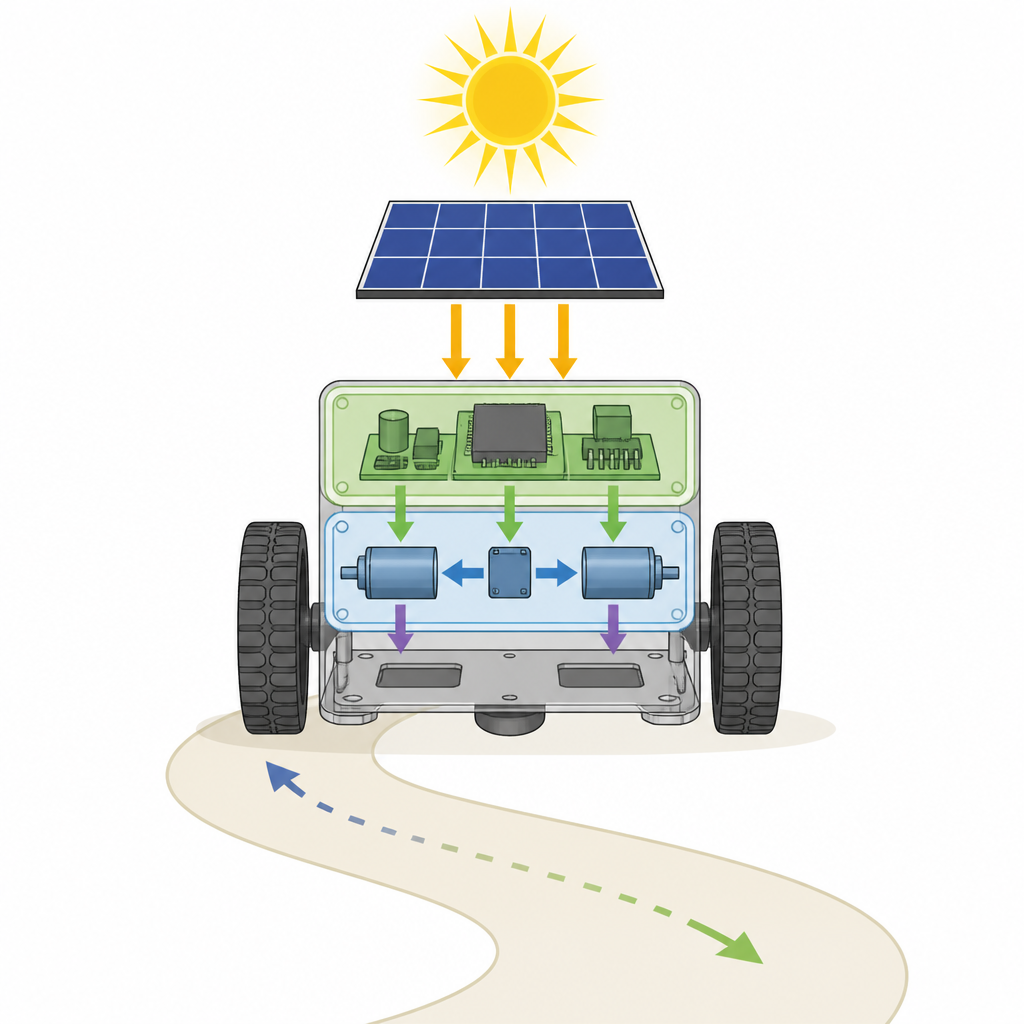
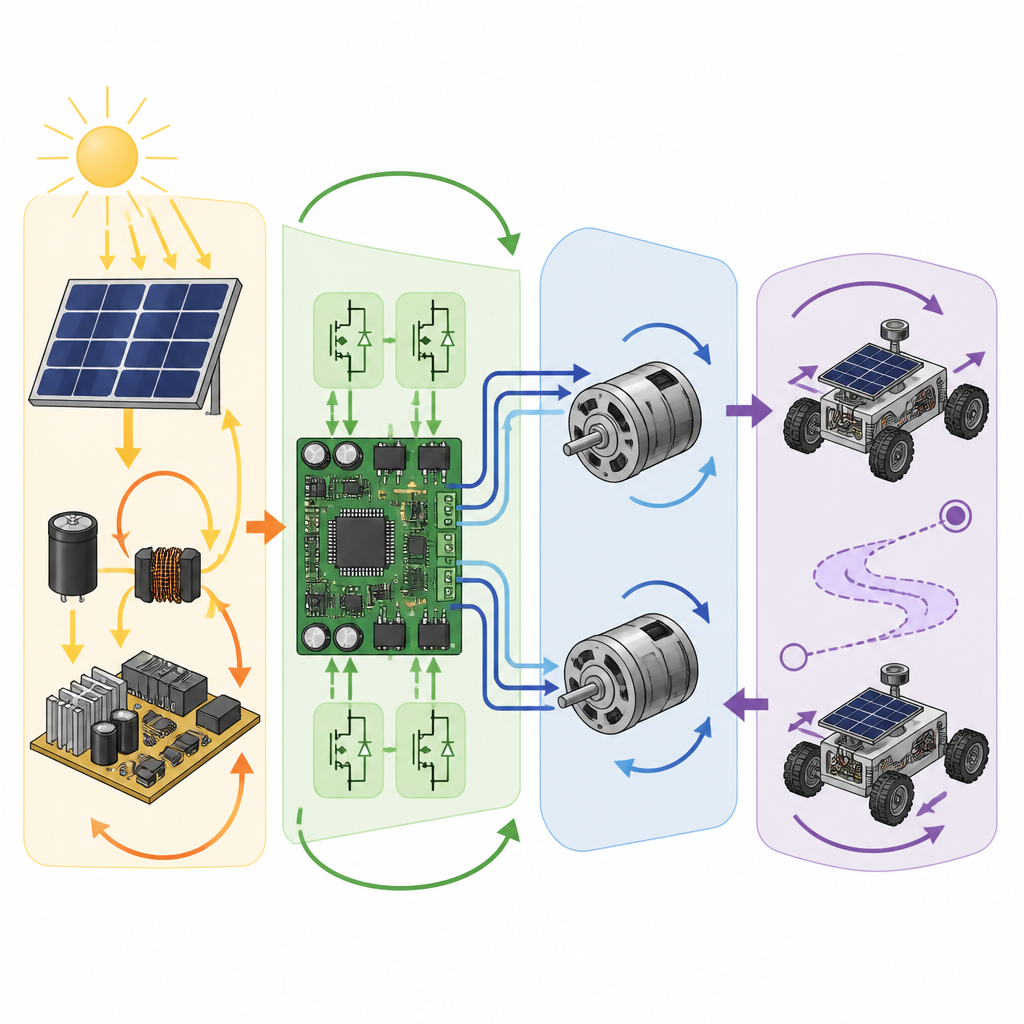
Neste trabalho, os autores projetam um esquema de controle único que integra as três partes principais de um robô com rodas: o chassi mecânico e as rodas, os motores elétricos que giram essas rodas, e a eletrônica que condiciona a energia do painel solar. O robô é um veículo de direção diferencial, guiado pela variação da velocidade das rodas esquerda e direita. A cadeia de potência inclui um painel fotovoltaico comercial, conversores que transformam a saída do painel em tensão adequada para os motores, e motores de corrente contínua em cada roda. Ao modelar todas essas partes com equações realistas, a equipe pode prever como a máquina inteira responde quando a luz solar e parâmetros internos variam.
Um sistema de decisão em três camadas
O controlador proposto funciona como um sistema de decisão em três camadas empilhadas de cima para baixo. No topo, uma camada de planejamento de movimento compara a posição e a orientação reais do robô com um caminho desejado e calcula velocidades-alvo para as rodas que podem ser positivas ou negativas, permitindo verdadeiro movimento de ida e volta. Uma segunda camada converte essas metas de velocidade em torque e então em correntes de motor, usando regras simples proporcionais e integrais para manter as correntes medidas próximas aos objetivos. Na base, uma camada de comutação ajusta rapidamente os conversores eletrônicos que ficam entre o painel solar e os motores. Essa camada usa uma mistura de ações deslizantes e integrais para moldar a tensão de saída de modo que os motores vejam as condições elétricas corretas apesar das oscilações na tensão do painel.
Testes sob variação de insolação
Para avaliar o desempenho, os pesquisadores constroem uma simulação detalhada em MATLAB e Simscape, incluindo um módulo solar real, modelos de motores realistas e circuitos conversores. Eles programam um trajeto suave que faz o robô andar para frente e depois reverter ao longo de um laço, enquanto o sol virtual segue dois padrões diferentes. Em um caso, a irradiância sobe e desce como em um dia claro. Em outro, a irradiância cai abruptamente, com ruído adicionado que imita nuvens e cintilação. A equipe também altera componentes elétricos-chave durante a execução para imitar envelhecimento ou variações de temperatura. Em todas essas condições, o novo controlador mantém os erros de posição e orientação do robô extremamente pequenos, na ordem de poucos milésimos de metro e uma fração ínfima de radiano.
Comparação com métodos anteriores
Os autores comparam seu projeto com um controlador de três níveis anterior que também considertava o corpo do robô, os motores e a eletrônica de potência, mas apenas permitia velocidades dos motores em uma única direção. Quando ambos os controladores são solicitados a seguir o mesmo caminho de ida e volta sob variação de insolação, o método mais antigo rapidamente perde a trilha assim que são necessárias velocidades negativas nas rodas, e seus erros crescem muito. O novo controlador de comutação, por contraste, mantém rastreamento preciso em ambas as direções e permanece estável, mostrando que o tratamento explícito das tensões bidirecionais dos motores e do comportamento de comutação é crucial para robôs movidos a energia solar.
O que isso significa para futuros robôs solares
Para um leitor não especialista, a mensagem principal é que é possível projetar robôs móveis alimentados por energia solar que se movem com precisão ao longo de rotas complexas, tanto para frente quanto para trás, sem serem muito afetados por nuvens passageiras ou mudanças elétricas internas. Ao coordenar o corpo do robô, os motores e os circuitos de potência em um esquema de controle unificado, este trabalho estabelece bases para máquinas mais confiáveis e conscientes de energia que podem patrulhar fazendas, inspecionar infraestruturas ou monitorar o ambiente enquanto consomem energia diretamente do sol.
Citação: Reyes-Reyes, E., Ordaz-Dehesa, J.C., Rodríguez-Cerón, J.R. et al. Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations. Sci Rep 16, 16188 (2026). https://doi.org/10.1038/s41598-026-47467-w
Palavras-chave: robôs solares, rastreamento de trajetória, robôs móveis, energia renovável, controle de robôs