Clear Sky Science · ja
全サブシステムと照度変動を考慮した、PV駆動移動ロボットの双方向軌跡追従のための動的切替コントローラ
太陽光で動くロボット
畑や工場敷地を一日中巡回し、太陽の力だけで動き、計画された経路を前後に移動してもコースから外れない小型の車輪型ロボットを想像してください。本研究は、通り過ぎる雲や電源の乱れが電力供給を妨げても、そうした太陽光駆動ロボットが軌道を維持するために必要な判断力と反射動作を与える方法を探ります。
ソーラーロボットが制御しにくい理由
太陽電池は安定した電力を供給しません。電圧や電流は日射、影、温度、経年変化に応じて上下します。ロボットにとっては、モータに予期しない多すぎるあるいは少なすぎるエネルギーが突然供給されることを意味します。従来の多くの制御システムはロボット本体、モータ、電力電子を別々の要素として扱ったり、電力段の挙動を単純化したりしてきました。その結果、往々にして一方向の走行でしか機能しなかったり、理想的な照明条件下でのみ動作したりし、日射が急変すると失敗することがありました。
全サブシステムを一元化する
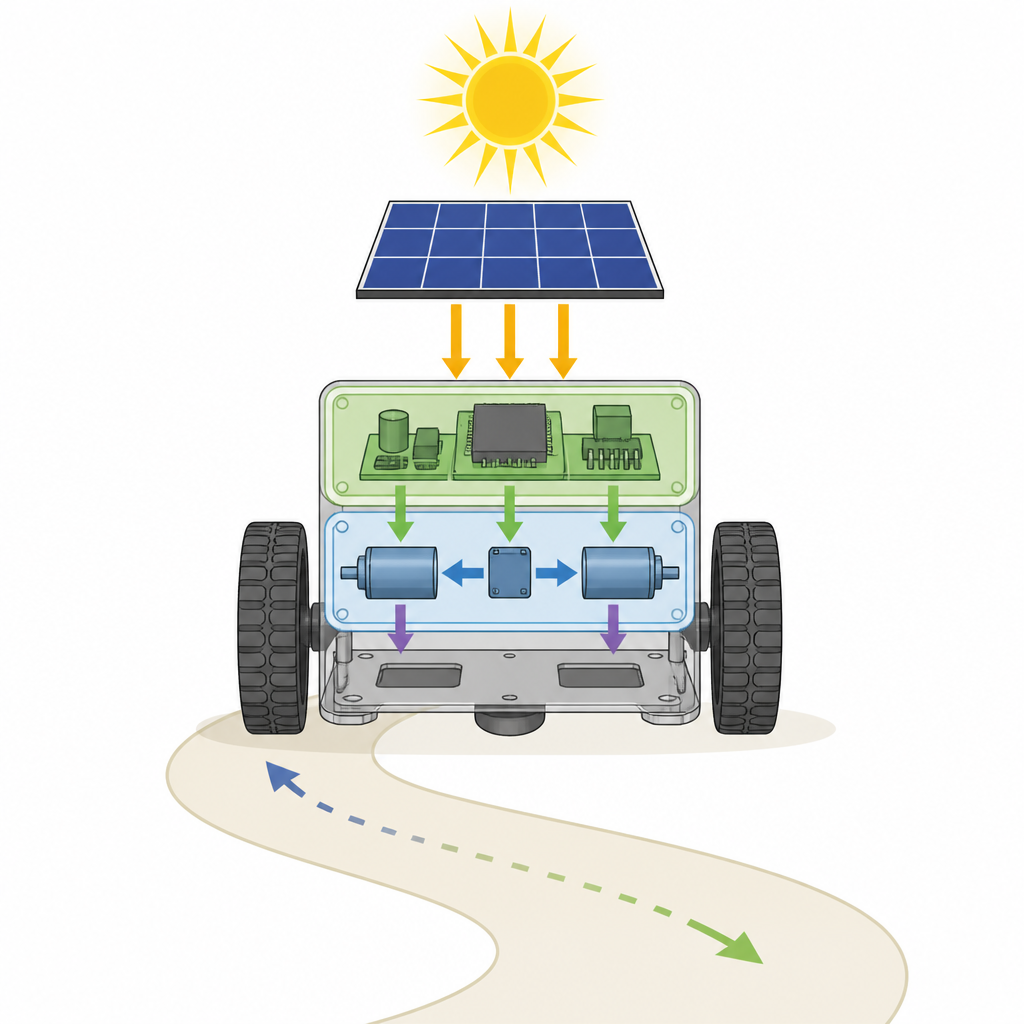
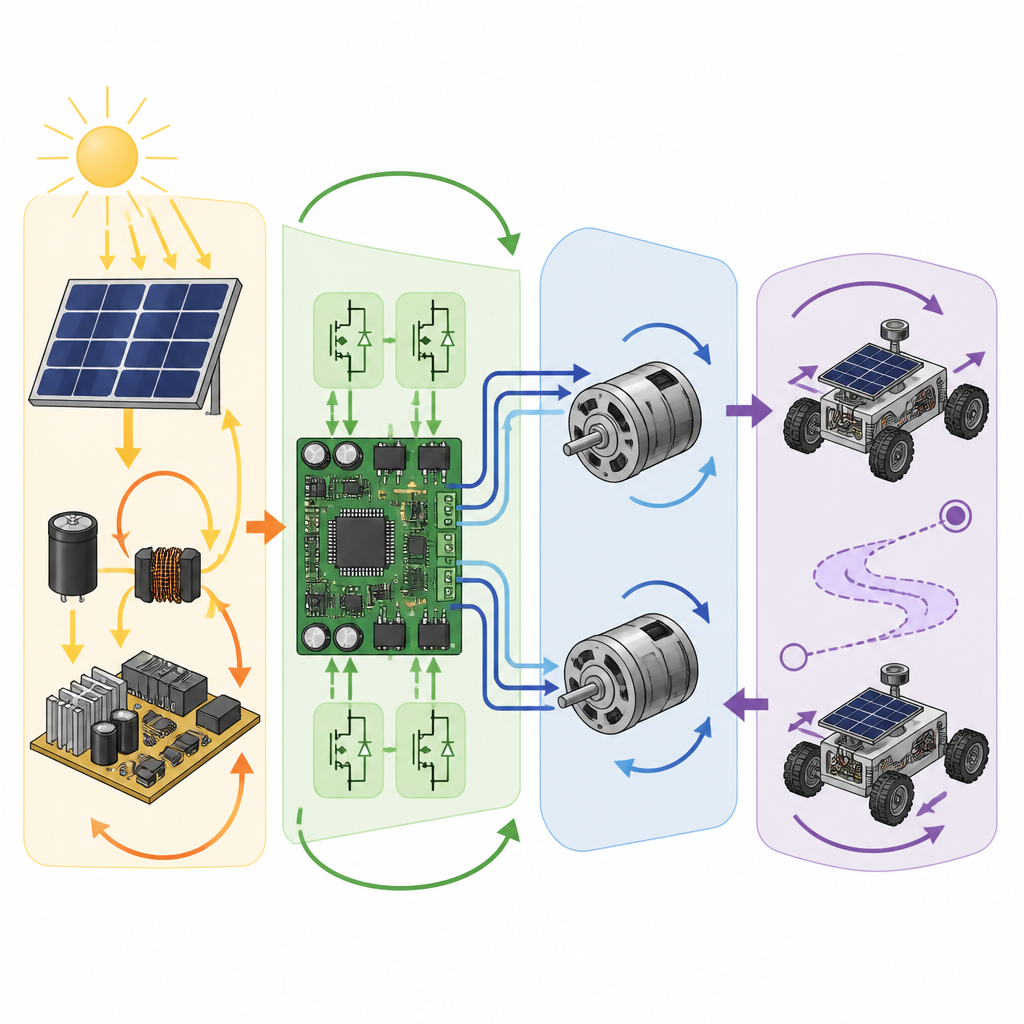
本研究では、車輪型ロボットの三つの主要部分――機械的シャシと車輪、それらを回す電動モータ、そして太陽電池からの電力を整える電子回路――を結びつける単一の制御方式を設計します。ロボットは左右の車輪速度差で操舵する差動駆動車です。電力系は市販の太陽光モジュール、パネル出力をモータ用電圧に変換するコンバータ、および各車輪の直流モータを含みます。これらすべてを現実的な方程式でモデル化することで、日射や内部パラメータが変化したときに機械全体がどのように応答するかを予測できます。
三層の意思決定システム
提案するコントローラは上から下へ積み重なった三層の意思決定システムのように機能します。最上位の軌道計画層はロボットの実際の位置と向きを望ましい経路と比較し、正または負の目標車輪速度を算出して真の前後移動を可能にします。第二層はこれらの速度目標をトルク、さらにモータ電流へと変換し、単純な比例・積分制御で測定電流を目標に近づけます。最下位の切替層は、太陽電池とモータの間にある電子コンバータを高速に調整します。この層はスライディング要素と積分作用を組み合わせて出力電圧を形成し、パネル電圧の変動にもかかわらずモータが適切な電気条件を受けるようにします。
変動する日射下での試験
性能評価のために、研究チームはMATLABとSimscapeで詳細なシミュレーションを構築しました。実際の太陽モジュール、現実的なモータモデル、コンバータ回路を含めています。滑らかな経路をプログラムし、ロボットが前進してからループ上で逆向きに戻るようにし、仮想の太陽は二つの異なるパターンをたどります。一つは晴天のように照度が上がり下がる場合、もう一つは照度が急激に低下し雲やフリッカーを模したノイズが加わる場合です。さらに中間で主要な電気部品の特性を変えて経年や温度変化を模擬します。これらのすべての条件で、新しいコントローラは位置誤差と姿勢誤差を極めて小さく保ち、数ミリメートル単位のオーダーと非常に小さいラジアンの分数で収まります。
従来手法との比較
著者らは、自身の設計をロボット本体、モータ、電力電子を考慮した以前の三層コントローラと比較しましたが、そちらはモータ速度が一方向にのみ許されていました。同一の往復経路を変動する日射下で両コントローラに追従させると、古い手法は負の車輪速度が必要になると軌道をすぐに見失い、誤差が大きく成長します。対照的に、新しい切替コントローラは双方向とも正確な追従を維持し安定性を保ちます。これは双方向のモータ電圧とスイッチング挙動を明示的に扱うことが、太陽光駆動ロボットにとって重要であることを示しています。
将来のソーラーロボットへの意味
専門外の人向けの主なメッセージは、太陽光から直接電力を供給される移動ロボットが、複雑なルートを前後に正確に移動でき、通過する雲や内部の電気的変化にあまり影響されないように設計できるということです。ロボットの本体、モータ、電力回路を一つの統合された制御方式で協調させることで、本研究は農場の巡回、インフラ検査、環境監視などを行う際に、より信頼性が高くエネルギー意識のある機器の基盤を築きます。
引用: Reyes-Reyes, E., Ordaz-Dehesa, J.C., Rodríguez-Cerón, J.R. et al. Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations. Sci Rep 16, 16188 (2026). https://doi.org/10.1038/s41598-026-47467-w
キーワード: ソーラーロボット, 軌跡追従, 移動ロボット, 再生可能エネルギー, ロボット制御