Clear Sky Science · en
Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations
Robots that run on sunlight
Imagine a small wheeled robot patrolling a field or industrial site all day, powered only by the sun, and able to move both forward and backward along a planned path without drifting off course. This study explores how to give such solar fed robots the brains and reflexes they need to stay on track, even when passing clouds or electrical hiccups disturb their power supply.
Why solar robots are hard to control
Solar panels do not deliver steady power. Their voltage and current rise and fall with sunlight, shadows, temperature, and aging. For a robot, that means the motors may suddenly receive more or less energy than expected. Many earlier control systems treated the robot’s body, its motors, and its power electronics as separate pieces, or they simplified how the power stage behaves. As a result, they often worked only in one driving direction or under ideal lighting, and could fail when sunlight changed quickly.
Bringing all subsystems under one roof
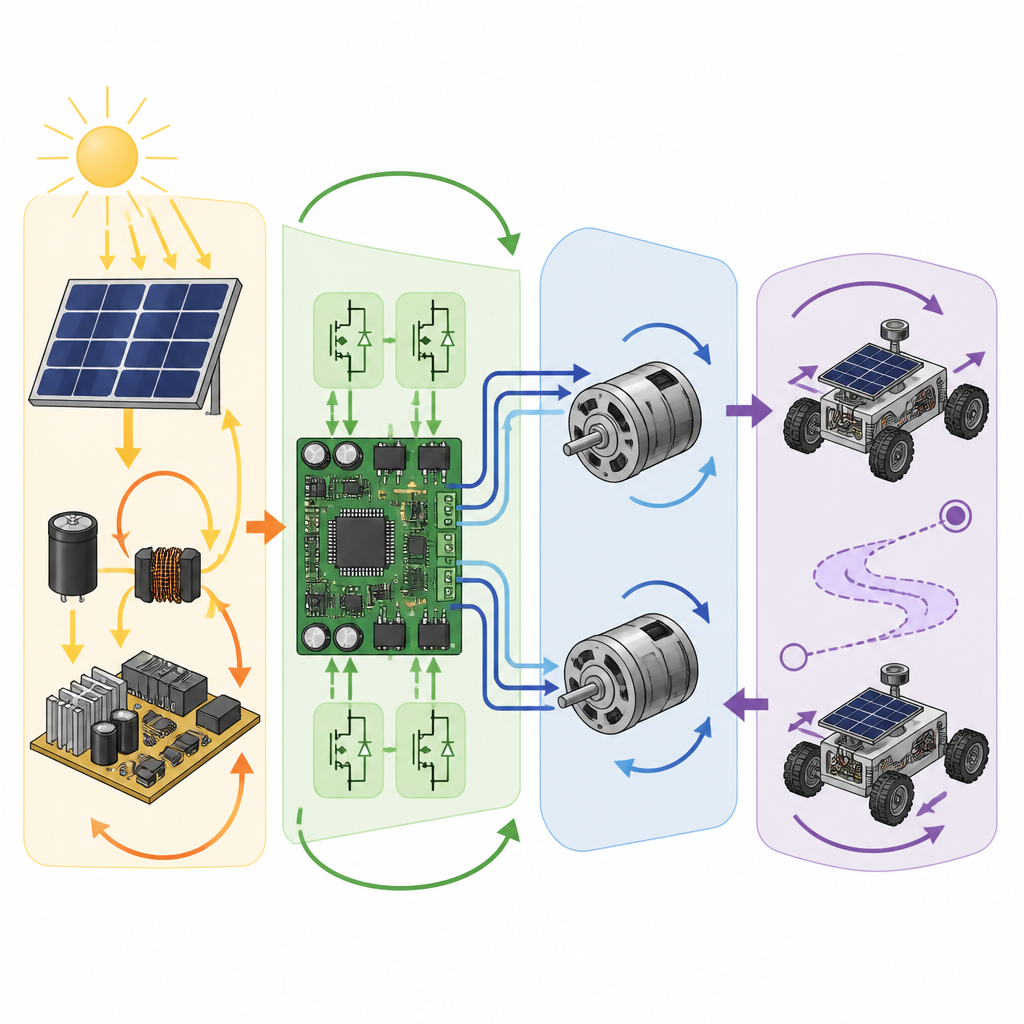
In this work, the authors design a single control scheme that ties together the three main parts of a wheeled robot: the mechanical chassis and wheels, the electric motors that spin those wheels, and the electronics that shape power from the solar panel. The robot is a differential drive vehicle, steered by changing the speed of its left and right wheels. The power chain includes a commercial photovoltaic panel, converters that turn the panel output into usable motor voltage, and direct current motors on each wheel. By modeling all of these parts with realistic equations, the team can predict how the whole machine responds when sunlight and internal parameters change.
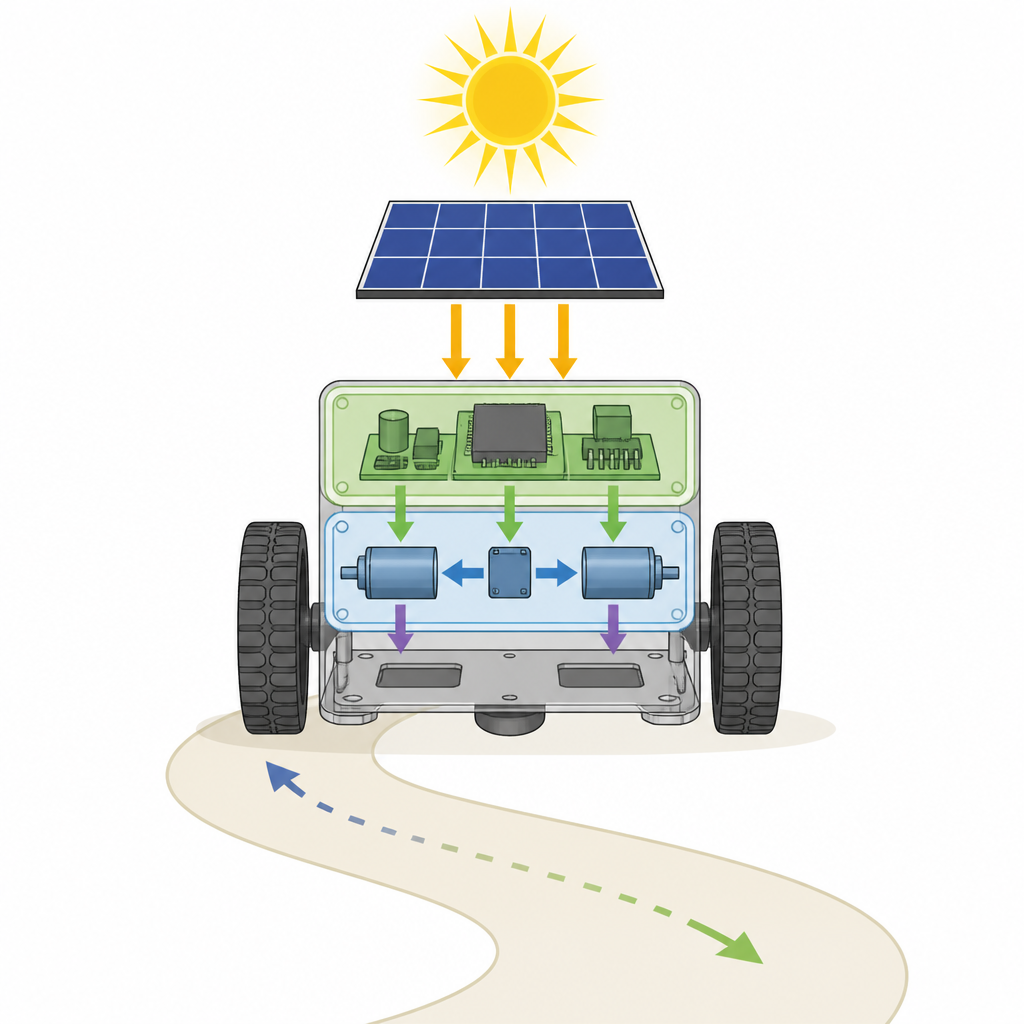
A three layer decision system
The proposed controller works like a three layer decision system stacked from top to bottom. At the top, a motion planning layer compares the robot’s actual position and heading with a desired path and computes target wheel speeds that may be positive or negative, allowing true back and forth motion. A second layer converts those speed targets into torque and then into motor currents, using simple proportional and integral rules to keep measured currents close to their goals. At the bottom, a switching layer rapidly adjusts the electronic converters that sit between the solar panel and the motors. This layer uses a mix of sliding and integral actions to shape the output voltage so that the motors see the right electrical conditions despite swings in the panel’s voltage.
Testing under changing sunlight
To evaluate performance, the researchers build a detailed simulation in MATLAB and Simscape, including a real solar module, realistic motor models, and converter circuits. They program a smooth path that makes the robot move forward, then reverse along a loop, while the virtual sun follows two different patterns. In one case, irradiance rises and falls like a clear day. In another, irradiance drops abruptly, with added noise that mimics clouds and flicker. The team also changes key electrical components mid run to imitate aging or temperature shifts. In all these conditions, the new controller keeps the robot’s position and heading errors extremely small, on the order of a few thousandths of a meter and a tiny fraction of a radian.
How it stacks up against earlier methods
The authors compare their design with a previous three level controller that also considered the robot body, motors, and power electronics, but only allowed motor speeds in a single direction. When both controllers are asked to follow the same back and forth path under varying sunlight, the older method quickly loses the trail once negative wheel speeds are needed, and its errors grow very large. The new switching controller, by contrast, maintains accurate tracking in both directions and stays stable, showing that explicit handling of bidirectional motor voltages and switching behavior is crucial for solar powered robots.
What this means for future solar robots
For a non specialist, the main message is that it is possible to design solar fed mobile robots that move precisely along complex routes, both forward and backward, without being bothered much by passing clouds or internal electrical changes. By coordinating the robot’s body, motors, and power circuits in one unified control scheme, this work lays groundwork for more reliable, energy aware machines that can patrol farms, inspect infrastructure, or monitor the environment while sipping power directly from the sun.
Citation: Reyes-Reyes, E., Ordaz-Dehesa, J.C., Rodríguez-Cerón, J.R. et al. Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations. Sci Rep 16, 16188 (2026). https://doi.org/10.1038/s41598-026-47467-w
Keywords: solar robots, trajectory tracking, mobile robots, renewable energy, robot control