Clear Sky Science · he
בקר החלפה דינמית למעקב מסלולים בכיוונים דו-כיווניים ברובוטים ניידים מונעים בפוטו-וולטאיקה המתחשב בכל תת-המערכות שלהם ובשינויים בהשמשה
רובוטים המונעים מאור השמש
דמיינו רובוט גלגלי קטן סורק שדה או אתר תעשייתי כל היום, המונע אך ורק מהשמש, ויכול לנוע הן קדימה והן אחורה לאורך מסלול מתוכנן מבלי לסטות ממסלולו. המאמר חוקר כיצד לתת לרובוטים המוזנים בסולארי את ה״מוח״ והתגובות המהירות הדרושים כדי להישאר על המסלול, גם כאשר עננות חולפת או הפרעות חשמליות מטרידות את אספקת הכוח.
מדוע קשה לשלוט ברובוטים סולאריים
לוחות סולאריים אינם מספקים כוח יציב. המתח והזרם שלהם עולים ויורדים עם עוצמת השמש, צללים, טמפרטורה והזדקנות. עבור רובוט, פירוש הדבר שהמנועים עלולים לקבל בפתאומיות יותר או פחות אנרגיה מהמצופה. מערכות בקרה קודמות רבות התייחסו לגוף הרובוט, למנועים ולאלקטרוניקת ההספק כאל חלקים נפרדים, או פישטו את התנהגות שלב הכוח. כתוצאה מכך, הן עבדו לעיתים רק בכיוון נסיעה אחד או בתאורה אידיאלית, ויכלו להתקלקל כאשר השמש השתנתה במהירות.
לאחד את כל תת-המערכות תחת שיטה אחת
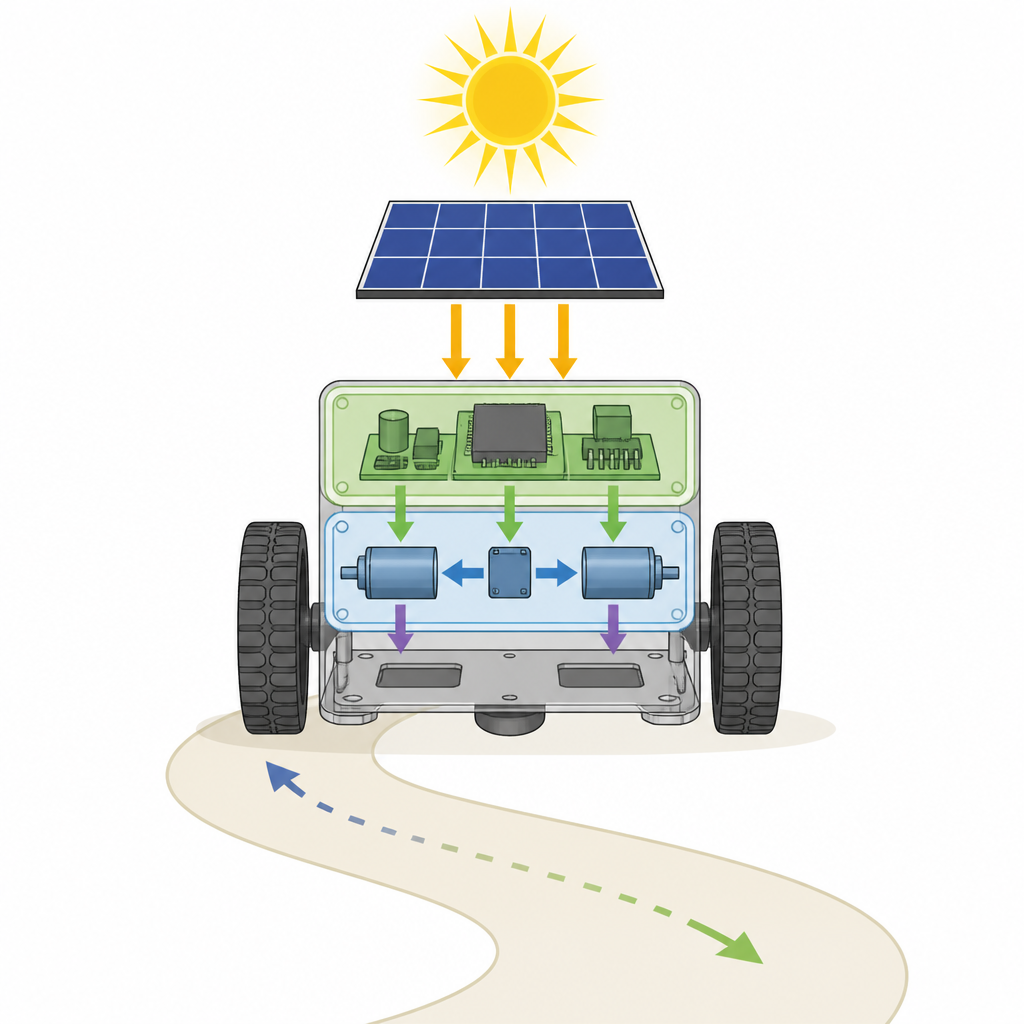
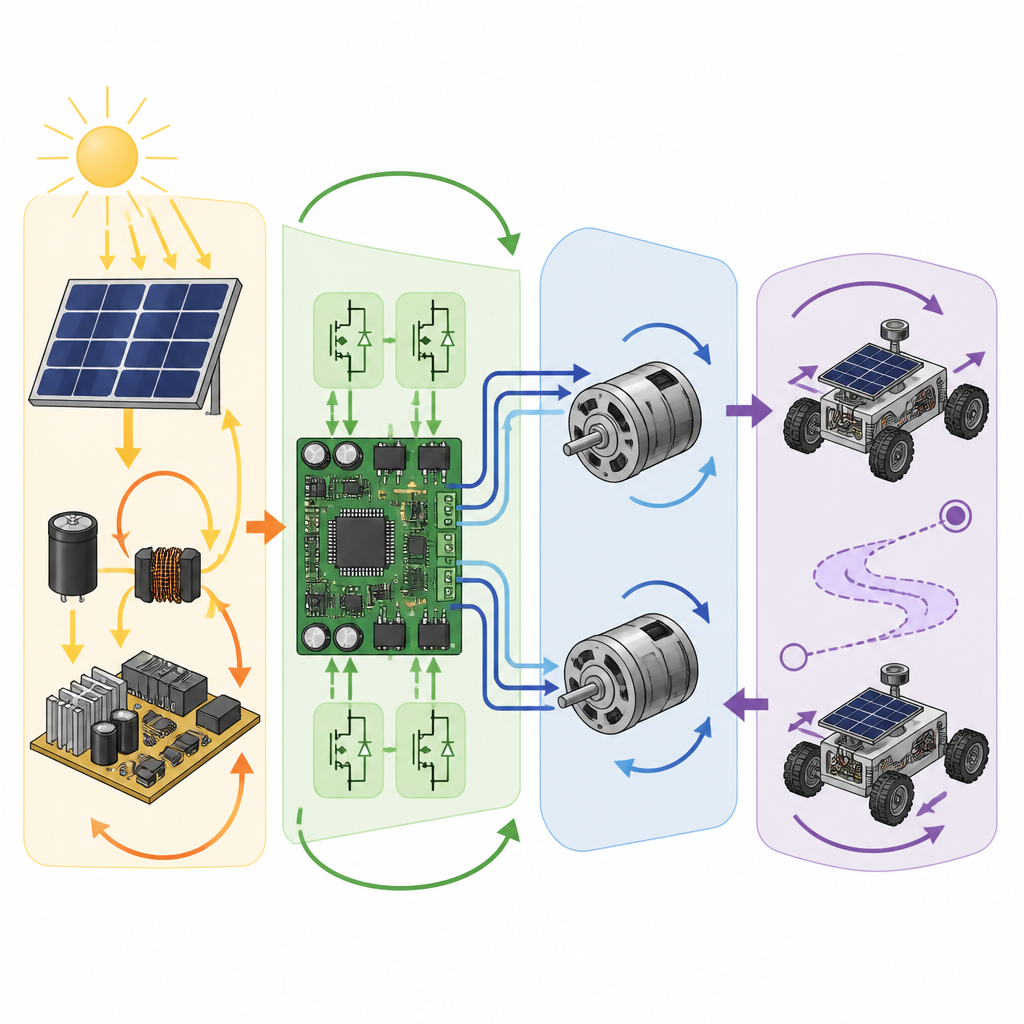
במחקר זה המחברים מעצבים שיטת בקרה יחידה שקושרת יחד את שלושת החלקים העיקריים של רובוט גלגלי: השלדה והמגלגלות, המנועים החשמליים שמסובבים את הגלגלים, והאלקטרוניקה שמעבדת את כוח הלוח הסולארי. הרובוט הוא רכב בדה-פרנציאלי (differential drive), הנשלט על ידי שינויי מהירות גלגל שמאלי וימני. שרשרת הכוח כוללת לוח פוטו-וולטאי מסחרי, ממירים שממירים את תוצאת הלוח למתח מתאים למנועים, ומנועי זרם ישר בכל גלגל. על ידי דוגמנות של כל הרכיבים הללו באמצעות משוואות מציאותיות, הצוות יכול לחזות כיצד המערכת המשולבת תגיב כשהשמש ופרמטרים פנימיים משתנים.
מערכת החלטה בשלוש שכבות
הבקר המוצע פועל כמערכת החלטה בשלוש שכבות ממוינות מלמעלה למטה. בשכבה העליונה, שכבת תכנון התנועה משווה בין המיקום וכיוון ההליכה בפועל של הרובוט לבין המסלול הרצוי ומחשבת מהירויות גלגל יעד שיכולות להיות חיוביות או שליליות, ובכך מאפשרות תנועה אמיתית קדימה ואחורה. שכבה שנייה ממירה את יעדי המהירות הללו למומנט ואז לזרמי מנוע, תוך שימוש בכללי פרופורציונלי ואינטגרלי פשוטים לשמירה על הזרמים הנמדדים קרובים ליעדיהם. בתחתית, שכבת ההחלפה משנה במהירות את הממירים האלקטרוניים שנמצאים בין לוח השמש למנועים. שכבה זו משתמשת בשילוב של פעולות גלישה (sliding) ואינטגרליות לעיצוב המתח הפלט כך שהמנועים יראו את התנאים החשמליים הנכונים למרות תנודות במתח הלוח.
בדיקות תחת אור שמש משתנה
להערכת הביצועים, החוקרים בונים סימולציה מפורטת ב-MATLAB וב-Simscape, הכוללת מודול סולארי אמיתי, מודלים ריאליסטיים של מנועים ומעגלי ממירים. הם מתכנתים מסלול חלק שגורם לרובוט לנוע קדימה ואז להסתובב לאחור לאורך לולאה, בעוד שהשמש הווירטואלית עוקבת שתי דפוסי irradiance שונים. במקרה אחד, ההשמשה עולה ויורדת כמו ביום בהיר. במקרה אחר, ההשמשה צונחת באופן חמור, עם רעש נוסף המדמה עננים ותקלות מהירות (flicker). הצוות גם משנה רכיבים חשמליים מרכזיים באמצע הריצה כדי לדמות הזדקנות או שינויים בטמפרטורה. בכל התנאים הללו, הבקר החדש שומר על שגיאות מיקום וכיוון קטנות מאוד, בסדר גודל של אלפיות מטר וחלק זעיר של רדיאן.
כיצד זה מתברג מול שיטות קודמות
המחברים משווים את העיצוב שלהם עם בקר תלת-שכבתי קודם שגם שקל את גוף הרובוט, המנועים ואלקטרוניקת ההספק, אך אפשר רק מהירויות מנוע בכיוון אחד. כאשר מבקשים משני הבקרים לעקוב אחר אותו מסלול קדימה ואחורה תחת שמש משתנה, השיטה הישנה מאבדת במהירות את המסלול ברגע שנדרשות מהירויות גלגל שליליות, והטעויות שלה נהיות גדולות מאוד. הבקר החדש, לעומת זאת, שומר על מעקב מדויק בשני הכיוונים ונשאר יציב, מה שמראה שטיפול מפורש במתחי מנוע דו-כיווניים ובהתנהגות ההחלפה של הממירים הוא קריטי לרובוטים המונעי שמש.
מה המשמעות לעתיד הרובוטים הסולאריים
בעבור הקורא הלא-מומחה, המסר המרכזי הוא שניתן לעצב רובוטים ניידים המוזנים מהשמש שזזים בדיוק לאורך מסלולים מורכבים, הן קדימה והן אחורה, מבלי להיות מוטרדים במידה רבה מעננים חולפים או משינויים חשמליים פנימיים. על ידי תיאום גוף הרובוט, המנועים ומעגלי ההספק במסגרת שיטת בקרה אחידה, עבודה זו מניחה תשתית למכונות אמינות יותר, המודעות לאנרגיה, שיכולות לסייר בחוות, לבדוק תשתיות או לנטר את הסביבה בעודן צורכות כוח ישירות מהשמש.
ציטוט: Reyes-Reyes, E., Ordaz-Dehesa, J.C., Rodríguez-Cerón, J.R. et al. Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations. Sci Rep 16, 16188 (2026). https://doi.org/10.1038/s41598-026-47467-w
מילות מפתח: רובוטים סולאריים, מעקב מסלולים, רובוטים ניידים, אנרגיה מתחדשת, בקרת רובוטים