Clear Sky Science · tr
PV enerjili mobil robotlarda tüm alt sistemleri ve ışınım değişimlerini dikkate alan çift yönlü yörünge takibi için dinamik anahtarlamalı denetleyici
Güneşle çalışan robotlar
Bir tarlayı ya da endüstriyel bir sahayı tüm gün devriye gezen, yalnızca güneşle beslenen ve planlı bir rota üzerinde hem ileri hem geri kaymadan hareket edebilen küçük bir tekerlekli robot hayal edin. Bu çalışma, güneş ışığı bulutlarla kesildiğinde veya elektriksel dalgalanmalar olduğunda bile bu tür güneş enerjili robotlara yol üzerinde kalmaları için gereken akıl yürütmeyi ve refleksleri nasıl kazandırabileceğini inceliyor.
Güneş robotlarını kontrol etmenin zorluğu
Güneş panelleri sabit güç vermez. Gerilim ve akım, güneş ışığı, gölgeler, sıcaklık ve yaşlanma ile artıp azalır. Bir robot için bu, motorların beklenenden aniden daha fazla veya daha az enerji alabileceği anlamına gelir. Önceki birçok kontrol sistemi robot gövdesini, motorlarını ve güç elektroniğini ayrı parçalar olarak ele aldı veya güç biriminin davranışını basitleştirdi. Sonuç olarak bu sistemler genellikle yalnızca tek yönde sürüşte veya ideal aydınlatma koşullarında çalıştı ve güneş ışığı hızla değiştiğinde başarısız olabildi.
Tüm alt sistemleri tek çatı altında toplamak
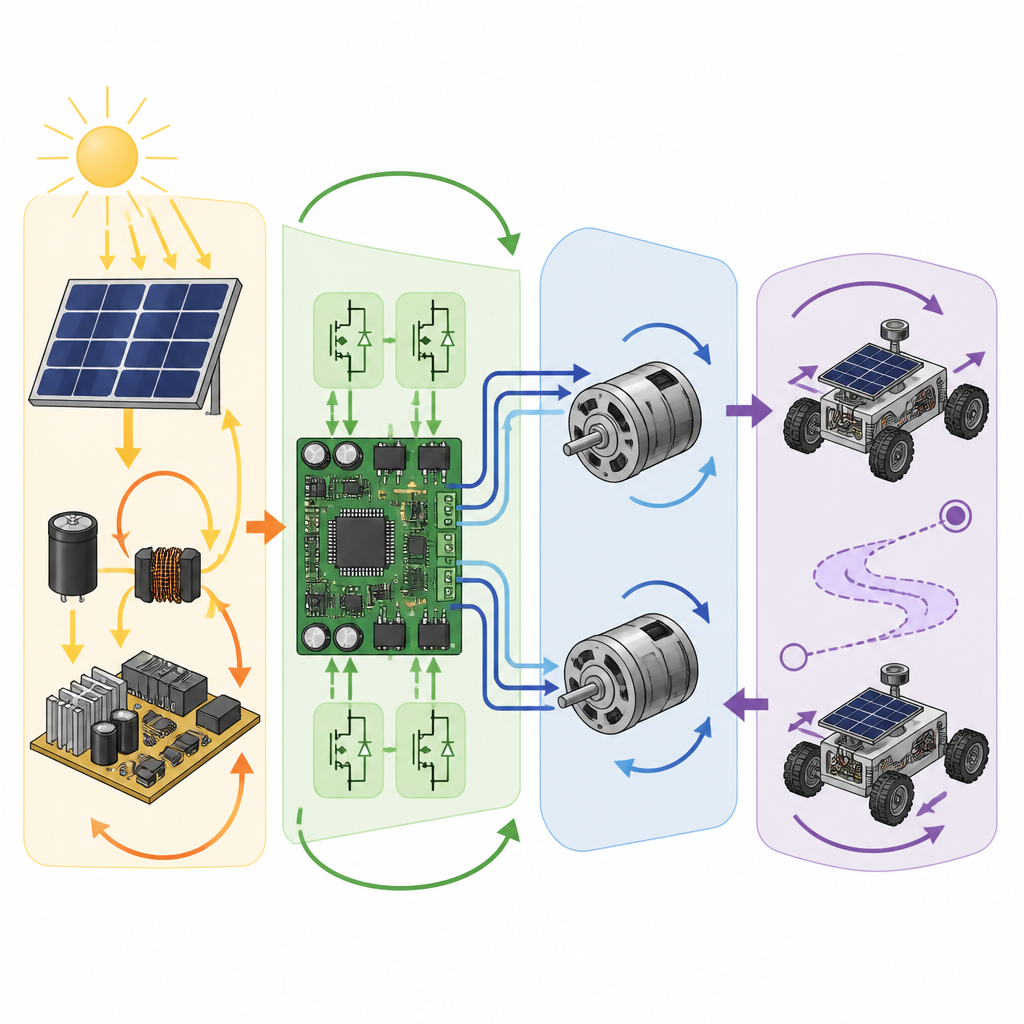
Bu çalışmada yazarlar, bir tekerlekli robotun üç ana parçasını birleştiren tek bir kontrol şeması tasarlıyor: mekanik şasi ve tekerlekler, bu tekerlekleri döndüren elektrik motorları ve güneş panelinden gelen gücü şekillendiren elektronik devreler. Robot diferansiyel sürüşlü bir araç; sol ve sağ tekerlek hızlarını değiştirerek yönlendiriliyor. Güç zinciri ticari bir fotovoltaik paneli, panel çıkışını motorlar için kullanılabilir gerilime dönüştüren konvertörleri ve her tekerlekte doğrudan akım motorlarını içeriyor. Bu parçaların tümünü gerçekçi denklemlerle modelleyerek ekip, güneş ışığı ve iç parametreler değiştiğinde tüm makinenin nasıl tepki vereceğini öngörebiliyor.
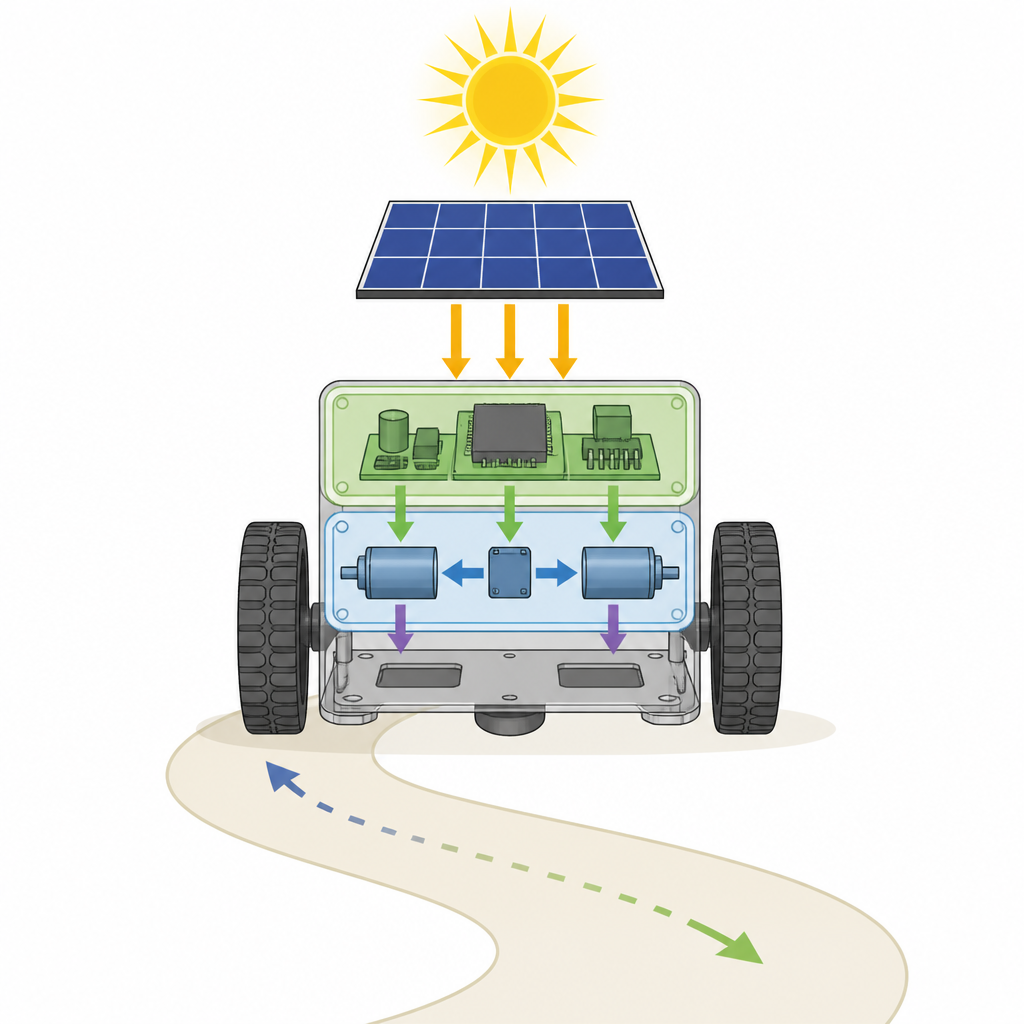
Üç katmanlı karar sistemi
Önerilen denetleyici, yukarıdan aşağıya yığılı üç katmanlı bir karar sistemi gibi çalışıyor. En üstte, bir hareket planlama katmanı robotun gerçek konumunu ve yönelimini istenen rota ile karşılaştırır ve ileri veya geri olabilen hedef tekerlek hızlarını hesaplar; böylece gerçek çift yönlü hareket sağlanır. İkinci katman bu hız hedeflerini torka, ardından motor akımlarına çevirir; ölçülen akımları hedeflere yakın tutmak için basit oransal ve integral kurallar kullanır. En altta, güneş paneli ile motorlar arasındaki elektronik konvertörleri hızla ayarlayan bir anahtarlama katmanı bulunur. Bu katman, panel gerilimindeki dalgalanmalara rağmen motorların doğru elektriksel koşulları görmesini sağlamak için kayan ve integral eylemlerin bir karışımını kullanarak çıkış gerilimini şekillendirir.
Değişen güneş ışığı altında test
Performansı değerlendirmek için araştırmacılar MATLAB ve Simscape içinde gerçek bir güneş modülü, gerçekçi motor modelleri ve konvertör devrelerini içeren ayrıntılı bir simülasyon kuruyorlar. Sanal güneş iki farklı desen izlerken robotun ileriye hareket edip sonra bir döngü boyunca geri dönmesini sağlayan düzgün bir yol programlıyorlar. Bir durumda ışınım açık bir gündeki gibi yükselip alçalıyor. Diğerinde ışınım aniden düşüyor ve bulutları ve flicker’ı taklit eden gürültü ekleniyor. Ekip ayrıca yaşlanma veya sıcaklık değişimlerini taklit etmek için anahtar elektrik bileşenlerini koşu ortasında değiştiriyor. Tüm bu koşullarda yeni denetleyici, robotun konum ve yönelim hatalarını milimetre mertebesinin birkaç binde birleri ve çok küçük bir radyan kesri düzeyinde son derece küçük tutuyor.
Önceki yöntemlerle karşılaştırma
Yazarlar tasarımlarını, robot gövdesini, motorları ve güç elektroniğini dikkate alan ancak yalnızca tek yönlü motor hızlarına izin veren önceki bir üç seviyeli denetleyiciyle karşılaştırıyor. Her iki denetleyici aynı ileri geri rotayı ve değişen güneş ışığını takip etmesi istendiğinde, eski yöntem negatif tekerlek hızlarına ihtiyaç duyulduğunda hızla rotayı kaybediyor ve hataları çok büyüyor. Yeni anahtarlamalı denetleyici ise her iki yönde de doğru takibi koruyor ve kararlı kalıyor; bu da güneş enerjili robotlar için çift yönlü motor gerilimleri ve anahtarlama davranışının açıkça ele alınmasının kritik olduğunu gösteriyor.
Gelecek güneş robotları için anlamı
Uzman olmayan biri için ana mesaj, güneşle beslenen mobil robotların karmaşık rotalar boyunca hem ileri hem geri hassas şekilde hareket edecek ve geçen bulutlar veya iç elektriksel değişikliklerden büyük ölçüde etkilenmeyecek şekilde tasarlanmasının mümkün olduğudur. Robotun gövdesini, motorlarını ve güç devrelerini tek bir birleşik kontrol şeması içinde koordine ederek bu çalışma, tarlaları devriye gezen, altyapıyı denetleyen veya çevreyi gözleyen ve enerjiyi doğrudan güneşten tüketen daha güvenilir, enerji bilincine sahip makineler için zemin hazırlıyor.
Atıf: Reyes-Reyes, E., Ordaz-Dehesa, J.C., Rodríguez-Cerón, J.R. et al. Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations. Sci Rep 16, 16188 (2026). https://doi.org/10.1038/s41598-026-47467-w
Anahtar kelimeler: güneş robotları, yörünge takibi, mobil robotlar, yenilenebilir enerji, robot kontrolü