Clear Sky Science · it
Controller a commutazione dinamica per il tracciamento bidirezionale di traiettorie in robot mobili alimentati da FV considerando tutti i loro sottosistemi e le variazioni di irraggiamento
Robot che funzionano alla luce del sole
Immaginate un piccolo robot su ruote che pattuglia un campo o un sito industriale per tutto il giorno, alimentato solo dal sole, in grado di muoversi sia in avanti sia indietro lungo un percorso pianificato senza deviare dalla rotta. Questo studio esplora come dotare tali robot solari di intelligenza e riflessi necessari per rimanere sulla traiettoria, anche quando nuvole passeggere o disturbi elettrici alterano la loro alimentazione.
Perché è difficile controllare i robot solari
I pannelli solari non forniscono potenza costante. Tensione e corrente variano con l’irraggiamento, le ombre, la temperatura e l’invecchiamento. Per un robot ciò significa che i motori possono ricevere improvvisamente più o meno energia di quanto previsto. Molti sistemi di controllo precedenti trattavano la struttura meccanica, i motori e l’elettronica di potenza come parti separate, oppure semplificavano il comportamento dello stadio di potenza. Di conseguenza, spesso funzionavano solo in una direzione di marcia o in condizioni di illuminazione ideali, e potevano fallire quando la luce solare cambiava rapidamente.
Riunire tutti i sottosistemi sotto un unico schema
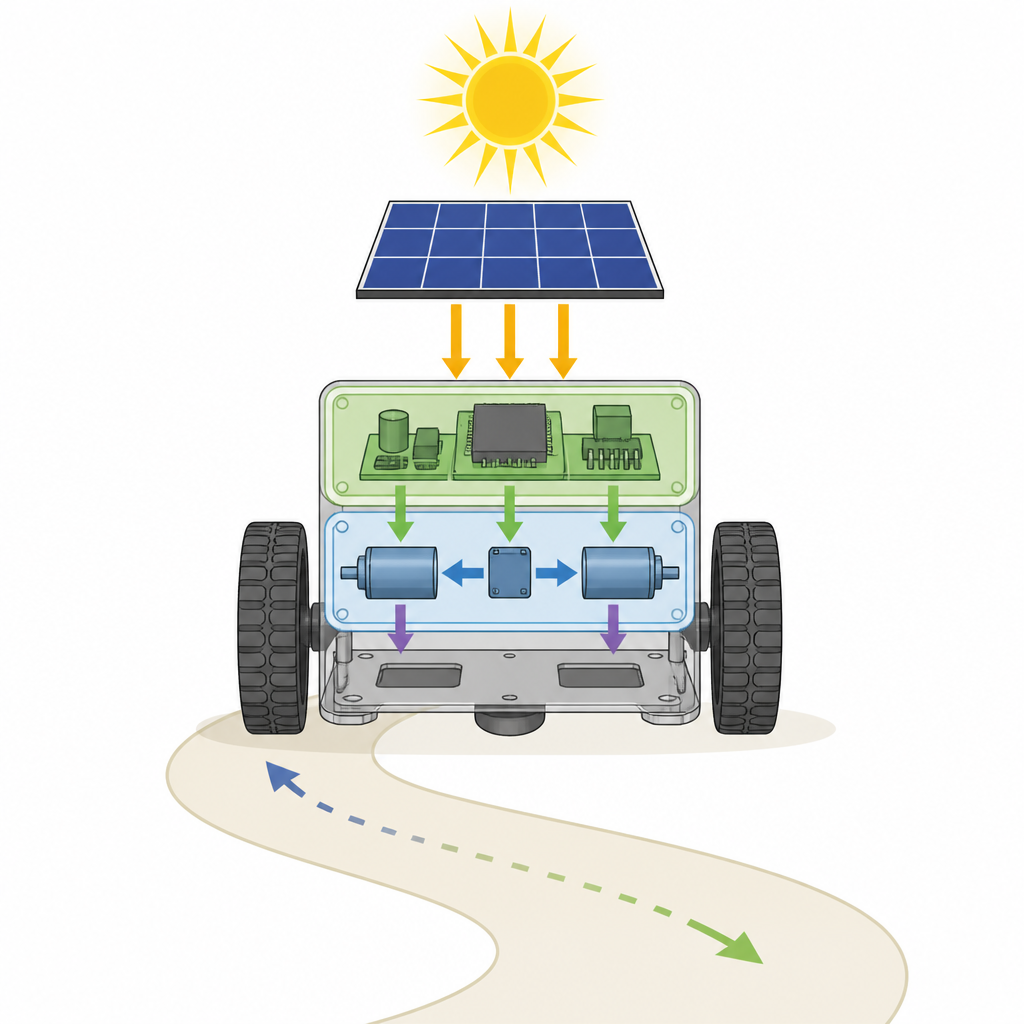
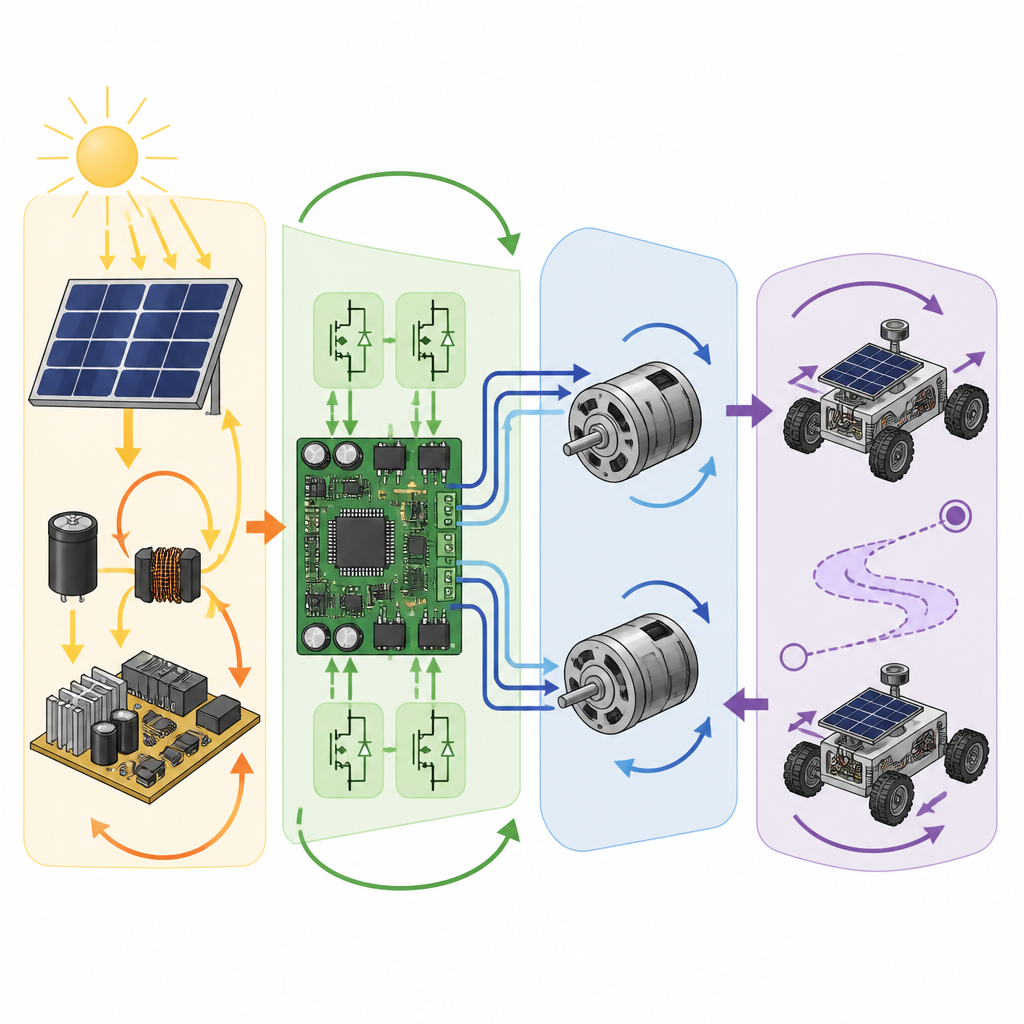
In questo lavoro gli autori progettano un unico schema di controllo che integra i tre elementi principali di un robot su ruote: lo chassis meccanico e le ruote, i motori elettrici che le azionano e l’elettronica che condiziona la potenza dal pannello solare. Il robot è un veicolo a guida differenziale, controllato variando la velocità delle ruote di sinistra e destra. La catena di potenza include un pannello fotovoltaico commerciale, convertitori che trasformano l’uscita del pannello in una tensione utilizzabile dai motori, e motori in corrente continua su ciascuna ruota. Modellando tutte queste parti con equazioni realistiche, il team può prevedere come l’intera macchina risponde quando cambiano l’irraggiamento e i parametri interni.
Un sistema decisionale a tre livelli
Il controllore proposto funziona come un sistema decisionale a tre livelli impilati dall’alto in basso. In cima, un livello di pianificazione del moto confronta la posizione e l’orientamento reali del robot con il percorso desiderato e calcola velocità obiettivo per le ruote che possono essere positive o negative, consentendo un vero movimento avanti e indietro. Un secondo livello converte tali obiettivi di velocità in coppia e poi in correnti motore, usando semplici leggi proporzionali e integrali per mantenere le correnti misurate vicine ai loro valori desiderati. In basso, un livello di commutazione regola rapidamente i convertitori elettronici che stanno fra il pannello solare e i motori. Questo livello usa una combinazione di azioni sliding e integrali per modellare la tensione in uscita in modo che i motori vedano le condizioni elettriche corrette nonostante le oscillazioni nella tensione del pannello.
Test sotto variazioni di luce
Per valutare le prestazioni i ricercatori costruiscono una simulazione dettagliata in MATLAB e Simscape, includendo un modulo solare reale, modelli di motori realistici e circuiti convertitori. Programmano un percorso fluido che fa muovere il robot in avanti e poi indietro lungo una curva, mentre il sole virtuale segue due diversi profili. In un caso l’irraggiamento sale e scende come in una giornata serena. Nell’altro, l’irraggiamento cala bruscamente, con rumore aggiunto che imita nuvole e flicker. Il team cambia anche componenti elettriche chiave durante la prova per imitare invecchiamento o variazioni di temperatura. In tutte queste condizioni, il nuovo controllore mantiene gli errori di posizione e orientamento del robot estremamente bassi, dell’ordine di pochi millesimi di metro e di una frazione minima di radiante.
Confronto con metodi precedenti
Gli autori confrontano il loro progetto con un precedente controllore a tre livelli che considerava anch’esso corpo del robot, motori ed elettronica di potenza, ma permetteva le velocità motore in una sola direzione. Quando entrambi i controllori sono chiamati a seguire lo stesso percorso avanti e indietro sotto irraggiamento variabile, il metodo più vecchio perde rapidamente la traiettoria non appena sono necessarie velocità negative delle ruote, e i suoi errori crescono molto. Il nuovo controllore a commutazione, al contrario, mantiene un tracciamento accurato in entrambe le direzioni e resta stabile, dimostrando che la gestione esplicita delle tensioni motore bidirezionali e del comportamento di commutazione è cruciale per i robot alimentati dal sole.
Cosa significa per i futuri robot solari
Per un non specialista, il messaggio principale è che è possibile progettare robot mobili alimentati dal sole che si muovono con precisione lungo percorsi complessi, sia avanti sia indietro, senza essere eccessivamente disturbati da nuvole passeggere o da variazioni elettriche interne. Coordinando corpo, motori e circuiti di potenza in un unico schema di controllo, questo lavoro pone le basi per macchine più affidabili e consapevoli dell’energia, in grado di pattugliare fattorie, ispezionare infrastrutture o monitorare l’ambiente assorbendo energia direttamente dal sole.
Citazione: Reyes-Reyes, E., Ordaz-Dehesa, J.C., Rodríguez-Cerón, J.R. et al. Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations. Sci Rep 16, 16188 (2026). https://doi.org/10.1038/s41598-026-47467-w
Parole chiave: robot solari, tracciamento traiettoria, robot mobili, energie rinnovabili, controllo robot