Clear Sky Science · ar
متحكم تبديل ديناميكي لتتبُّع المسار ثنائي الاتجاه في روبوتات متنقلة تعمل بالطاقة الشمسية مع الأخذ بعين الاعتبار كل وحداتها الفرعية وتغيرات الإشعاع
روبوتات تعمل بأشعة الشمس
تخيل روبوتاً صغيراً على عجلات يجوب حقلاً أو موقعاً صناعياً طوال اليوم، يعمل بالطاقة الشمسية فقط، وقادراً على الحركة للأمام والخلف على طول مسار مخطط دون الانحراف عنه. تستعرض هذه الدراسة كيفية تزويد مثل هذه الروبوتات المغذاة بالشمس بالعقل وردود الفعل اللازمة للبقاء على المسار، حتى عندما تعترض السحب المارة أو تحدث اضطرابات كهربائية في إمداد الطاقة.
لماذا يصعب التحكم في الروبوتات الشمسية
لا توفر الألواح الشمسية طاقة ثابتة. فالفولتية والتيار يتصاعدان ويتناقصان مع ضوء الشمس والظل ودرجة الحرارة والتقادم. بالنسبة للروبوت، يعني ذلك أن المحركات قد تتلقى فجأة طاقة أكثر أو أقل مما هو متوقع. عالجت أنظمة التحكم السابقة جسم الروبوت ومحركاته وإلكترونيات الطاقة غالباً كقطع منفصلة، أو بسطت سلوك مرحلة القدرة. ونتيجة لذلك، كانت تعمل غالباً في اتجاه قيادة واحد أو تحت إضاءة مثالية فقط، وقد تتعطل عندما يتغير ضوء الشمس بسرعة.
جمع كل الوحدات الفرعية تحت مظلة واحدة
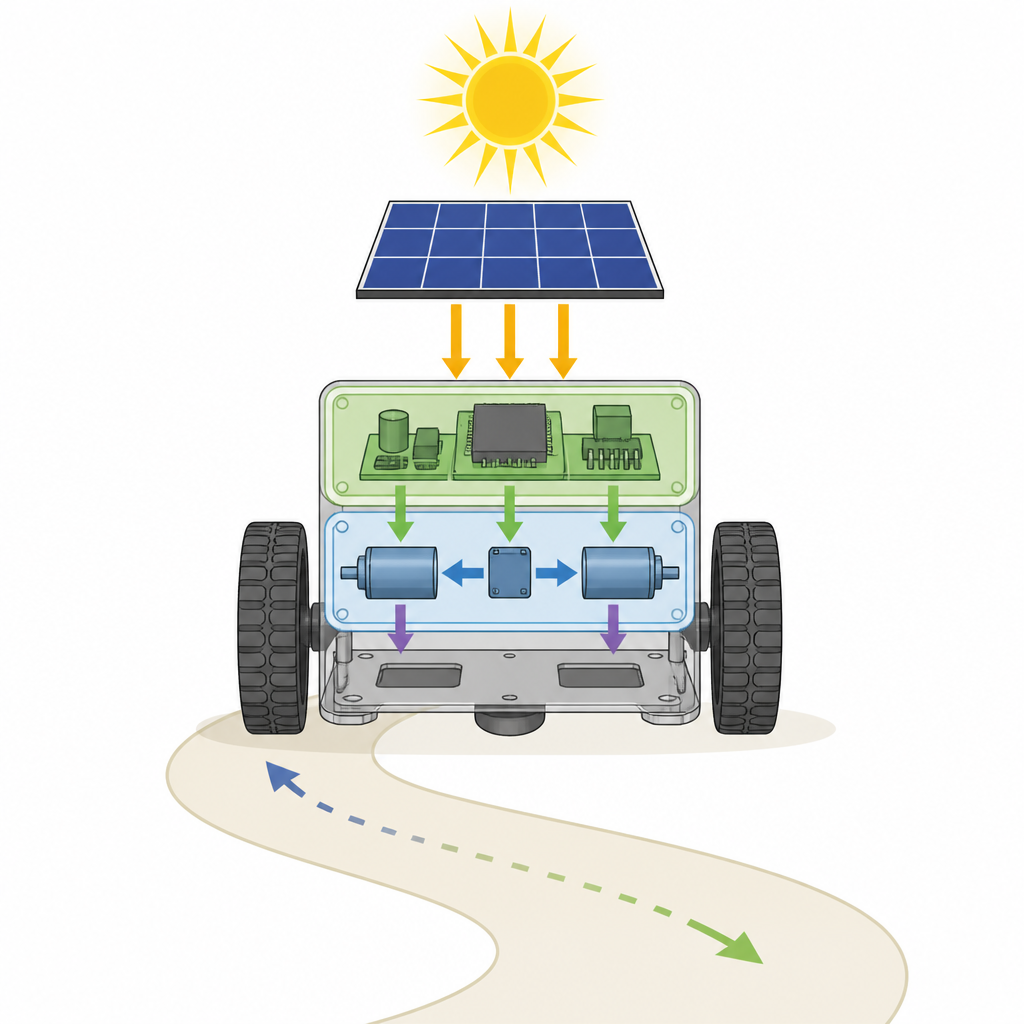
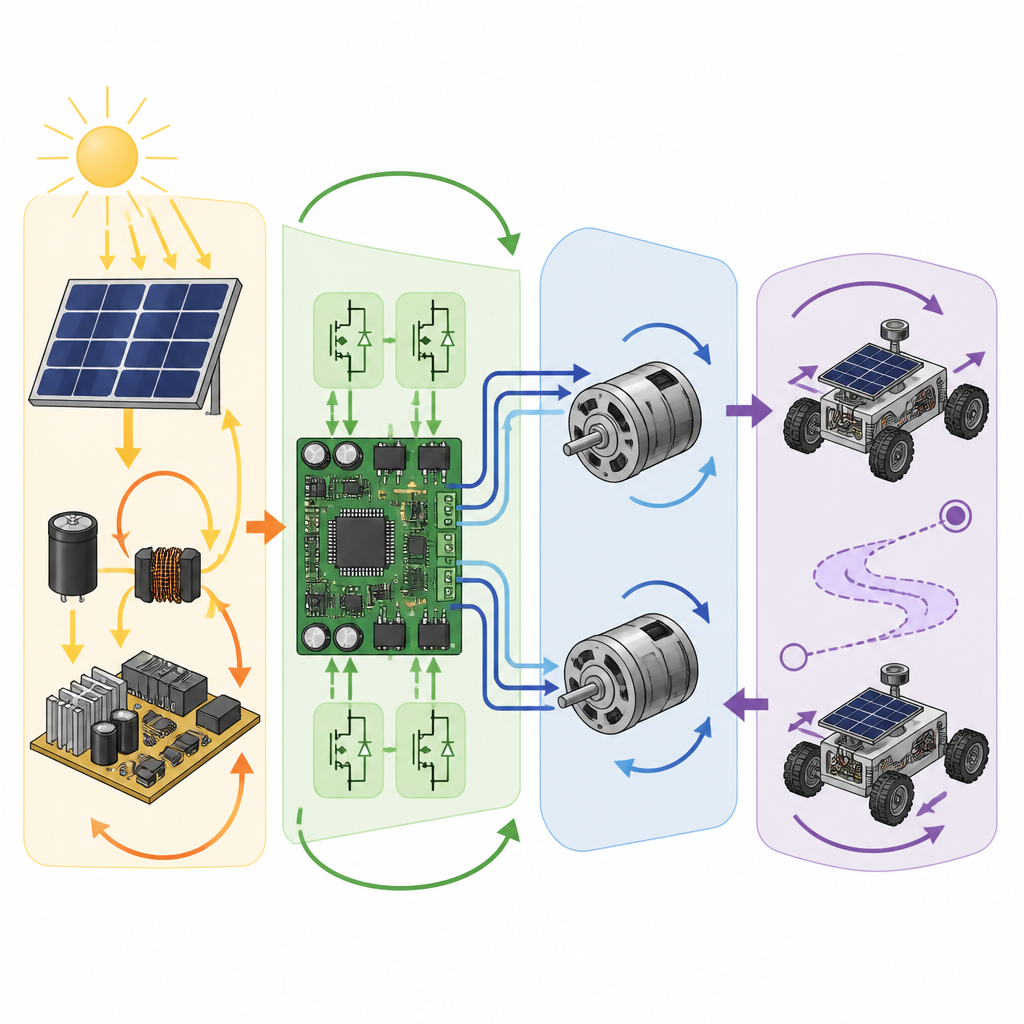
في هذا العمل، يصمم المؤلفون مخطط تحكم موحّد يربط بين الأجزاء الثلاثة الرئيسية للروبوت العجلاتي: الهيكل الميكانيكي والعجلات، والمحركات الكهربائية التي تدير تلك العجلات، والإلكترونيات التي تشكل طاقة اللوح الشمسي. الروبوت هو مركبة ذات دفع تفاضلي، يتم توجيهها بتغيير سرعة العجلات اليسرى واليمنى. تشمل سلسلة الطاقة لوحة ضوئية تجارية، ومحولات تحول خرج اللوح إلى فولتية مناسبة للمحركات، ومحركات تيار مستمر على كل عجلة. من خلال نمذجة كل هذه الأجزاء بمعادلات واقعية، يمكن للفريق التنبؤ بكيفية استجابة الآلة بأكملها عند تغير ضوء الشمس والمعلمات الداخلية.
نظام قرارات ثلاثي الطبقات
يعمل المتحكم المقترح كنظام قرارات ثلاثي الطبقات مكدّس من الأعلى إلى الأسفل. في الأعلى، طبقة تخطيط الحركة تقارن موضع الروبوت الفعلي واتجاهه مع المسار المرغوب وتحسب سرعات العجلات المستهدفة التي قد تكون موجبة أو سالبة، مما يتيح حركة حقيقية ذهاباً وإياباً. الطبقة الثانية تحول أهداف السرعة تلك إلى عزم ثم إلى تيارات المحرك، باستخدام قواعد نسبية وتكامُلية بسيطة للحفاظ على التيارات المقاسة قريبة من أهدافها. في القاع، طبقة التبديل تضبط بسرعة المحولات الإلكترونية الواقعة بين اللوح الشمسي والمحركات. تستخدم هذه الطبقة مزيجاً من إجراءات الانزلاق والتكامُل لتشكيل فولتية الخرج بحيث ترى المحركات الظروف الكهربائية الصحيحة رغم تقلبات فولتية اللوح.
الاختبار تحت ضوء شمس متغير
لتقييم الأداء، يبني الباحثون محاكاة مفصّلة في MATLAB وSimscape، تتضمن لوحة شمسية حقيقية، ونماذج محرك واقعية، ودارات محول. يبرمجون مساراً سلساً يجعل الروبوت يتحرك للأمام ثم يعكس المسير على حلقة، بينما يتبع الشمس الافتراضية نمطين مختلفين. في حالة واحدة، يرتفع الإشعاع وينخفض مثل يوم صافٍ. وفي أخرى، يهبط الإشعاع فجأة مع إضافة ضوضاء تحاكي السحب والوميض. يغير الفريق أيضاً مكونات كهربائية رئيسية أثناء التشغيل لمحاكاة الشيخوخة أو تغيّر الحرارة. في كل هذه الظروف، يحافظ المتحكم الجديد على أخطاء الموضع والاتجاه صغيرة للغاية، على مستوى بضعة أجزاء من الألف من المتر وجزء ضئيل من الراديان.
كيف يقارن بالطرق السابقة
يقارن المؤلفون تصميمهم مع متحكم ثلاثي المستويات سابق اعتبر أيضاً جسم الروبوت والمحركات وإلكترونيات القدرة، لكنه سمح فقط بسرعات محرك في اتجاه واحد. عندما يُطلب من كلا المتحكمين اتباع نفس المسار ذهاباً وإياباً تحت ضوء شمس متغير، يفقد الأسلوب الأقدم المسار بسرعة بمجرد الحاجة إلى سرعات عجلة سالبة، وتكبر أخطاؤه كثيراً. بينما يحافظ متحكم التبديل الجديد، بالمقابل، على تتبُّع دقيق في كلا الاتجاهين ويظل مستقراً، مما يُظهر أن المعالجة الصريحة للفولتيات ثنائية الاتجاه للمحركات وسلوك التبديل أمران حاسمان للروبوتات العاملة بالطاقة الشمسية.
ماذا يعني ذلك لروبوتات الشمس المستقبلية
بالنسبة لغير المتخصص، الرسالة الأساسية هي أنه من الممكن تصميم روبوتات متنقلة مغذاة بالشمس تتحرك بدقة على مسارات معقدة، للأمام والخلف، دون أن تتأثر بشكل كبير بسحب مارة أو تغيّرات كهربائية داخلية. عبر تنسيق جسم الروبوت والمحركات ودارات الطاقة في مخطط تحكم موحّد، يضع هذا العمل أساساً لآلات أكثر موثوقية وواعية للطاقة يمكنها التجوال في المزارع، أو فحص البنى التحتية، أو مراقبة البيئة أثناء استهلاكها للطاقة مباشرة من الشمس.
الاستشهاد: Reyes-Reyes, E., Ordaz-Dehesa, J.C., Rodríguez-Cerón, J.R. et al. Dynamic switching controller for bidirectional trajectory tracking in PV powered mobile robots considering all their subsystems and irradiance variations. Sci Rep 16, 16188 (2026). https://doi.org/10.1038/s41598-026-47467-w
الكلمات المفتاحية: الروبوتات الشمسية, تتبُّع المسار, الروبوتات المتنقلة, الطاقة المتجددة, تحكم الروبوت