Clear Sky Science · zh
通过故障内在表征与传感器失效下通道自愈实现工业机器人传动件跨机故障诊断
为何维持机器人关节健康至关重要
工业机器人在工厂中默默运作,焊接车身、搬运零件并加工精密部件。每个机械臂内部,隐藏的齿轮和轴承在高载荷与持续的停启运动下工作。当这些部件开始磨损时,最早的征兆往往是振动的细微变化。在现实环境中捕捉这些早期警示很困难:噪声、速度变化甚至传感器损坏都可能掩盖问题。本研究探索了一种新的“聆听”方式:通过学习实验室内其他机器的振动数据,即便某些传感器失效也能监测机器人关节。
跨多台机器监听振动
研究者关注机器人关节内部的传动系统,在那里电机、轴承和特种齿轮箱将控制指令转化为精确运动。这些部件在故障(如磨损或开裂)出现时会产生变化的振动模式。与其为每台机器人建立精细的物理模型,团队采用数据驱动的方法:从若干公开试验台收集振动信号,这些试验台配备轴承和齿轮箱,并在不同转速和负载下运行。核心思想是从这些较为简单的机器中学习通用的故障模式,然后将该知识应用到训练时可能未见过的复杂机器人关节上。
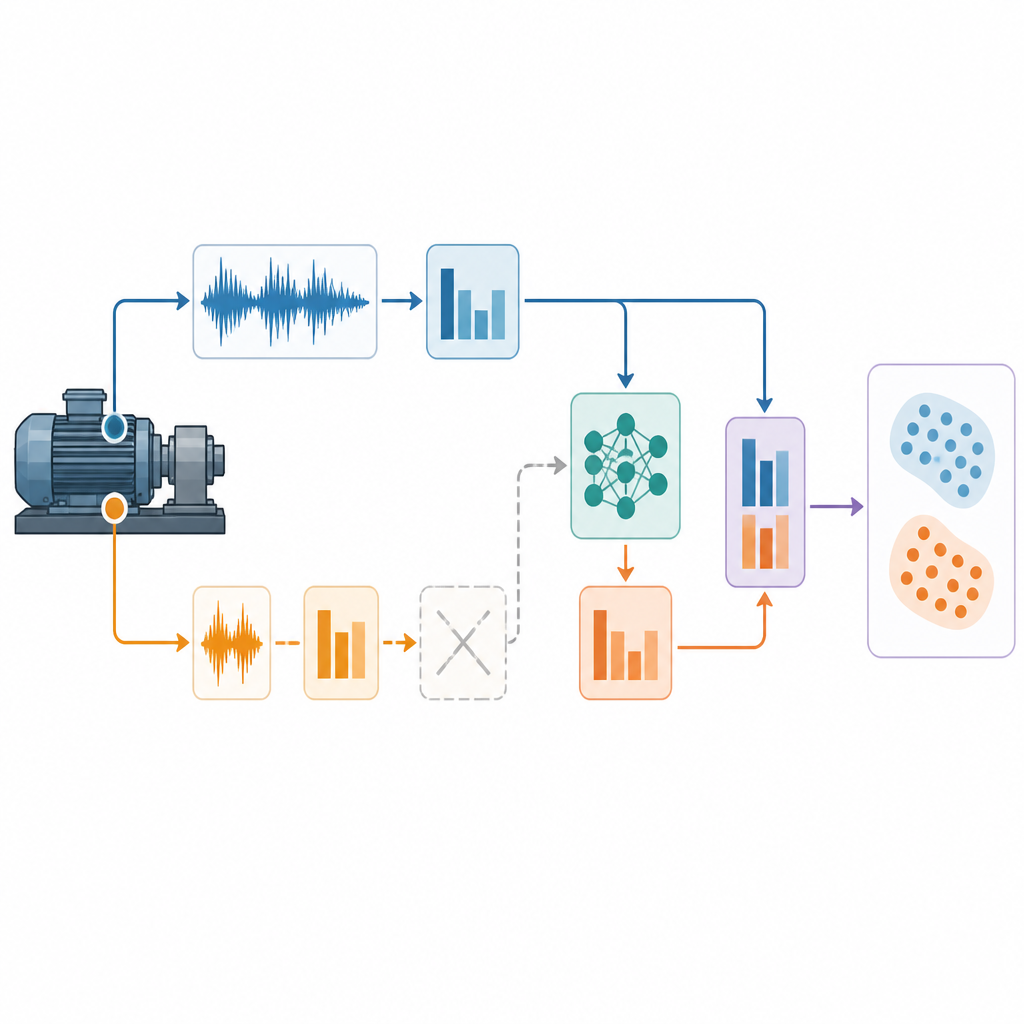
为此,方法将每个测量点的两个方向振动信号视为一对通道。一个共享的编码器网络分别处理每个通道,将原始波形转换为紧凑的特征向量,捕捉损伤引发的冲击的时序与强度。通过采用多种滤波器尺寸和注意力机制,编码器突显与故障相关的脉冲,同时抑制背景结构噪声和传感器布置带来的影响。结果是对某一时刻部件状态的双通道描述。

找到故障的共同语言
不同实验室的机器甚至不同机器人通常不会以完全相同的方式运行。转速、负载和机械布局都会改变振动模式,这容易使模型依赖机器特有的惯性特征而非真实的故障信号。为避免这一陷阱,作者引入了一种“集合级”机制,将来自所有机器和两个通道的同类故障特征进行分组。这些组被拉向共享的“原型”,这些原型类似于每种健康状态的语义中心,例如轴承的正常、内圈损伤或外圈损伤。通过鼓励同类故障样本在单一原型周围聚集,网络学习到在不同机器与工况下稳定的内在故障表征,而不是对某台试验台的过拟合。
修复丢失的传感器通道
在真实工厂中,传感器可能失效、线缆松动,或某个通道无预警地失声。标准的多传感器诊断系统在这种情况下常常崩溃,因为训练时假定所有输入都存在。为应对这一点,团队加入了“通道自愈”模块。在训练阶段,当两个通道均可用时,两个小型网络学习如何将一个通道的特征翻译为另一个通道的特征,这使模型掌握不同方向振动之间的典型关系。之后若某一通道失效,系统便利用存活通道在特征空间中重建一个合理的替代通道。与故障原型相关的语义约束确保重建特征与已知故障类别一致。
在噪声、速度变化与失效情形下的测试
该方法使用三组数据集作为“教师”并以两组作为“学生”进行测试。教师包含若干知名的轴承与齿轮台架,在恒速与变速条件下运行。学生更接近机器人关节:一组是以粗糙齿轮噪声为主的行星齿轮箱,另一组记录了类似机器人臂启停的快速 0–40–0 Hz 速度扫描下的轴承。在部分测试中加入额外白噪声以使条件更苛刻,另一些测试则故意将一传感器通道置零以模拟完全失效。在这些情形下,所提出的方法始终优于七种先进基线技术,在强噪声、极端速度变化和单通道丢失的情况下仍保持高准确率。
对真实机器人生产线的意义
对非专业读者而言,关键信息是作者构建了一种能将健康状态知识从实验室机器迁移到运行中机器人而无需事先获取每台机器的新故障数据的方法。通过学习跨机器的通用“故障语言”并重建失效传感器的信息,系统在条件嘈杂、变化快速或部分盲区时仍能标记出损坏的齿轮或轴承。这并不替代细致的工程设计或维护,但朝着可靠的、持续在线的监测更进一步,从而保持工业机器人安全运行并减少工厂的意外停机。
引用: Yao, Z., Zhao, H., Wang, Y. et al. Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure. Sci Rep 16, 15921 (2026). https://doi.org/10.1038/s41598-026-47066-9
关键词: 工业机器人, 故障诊断, 振动监测, 传感器故障, 领域泛化