Clear Sky Science · en
Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure
Why keeping robot joints healthy matters
Industrial robots quietly keep factories running, welding car bodies, moving parts, and machining delicate components. Inside each robot arm, hidden gears and bearings work under heavy loads and constant stop‑and‑go motion. When these parts start to wear out, the first signs are tiny changes in vibration. Spotting those early warnings is hard in the real world, where noise, changing speeds, and even broken sensors can hide trouble. This study explores a new way to "listen" to robot joints, even when some sensors fail, by learning from vibration data collected on other machines in the lab.
Listening to vibrations across many machines
The researchers focus on the transmission system inside a robot joint, where motors, bearings, and special gearboxes turn control commands into precise motion. These parts generate vibration patterns that change when faults such as wear or cracks appear. Instead of building a detailed physical model of each robot, the team uses data‑driven methods: they collect vibration signals from several public test rigs equipped with bearings and gearboxes running under different speeds and loads. The central idea is to learn general fault patterns from these simpler machines and then apply that knowledge to complex robot joints that may never have been seen during training.
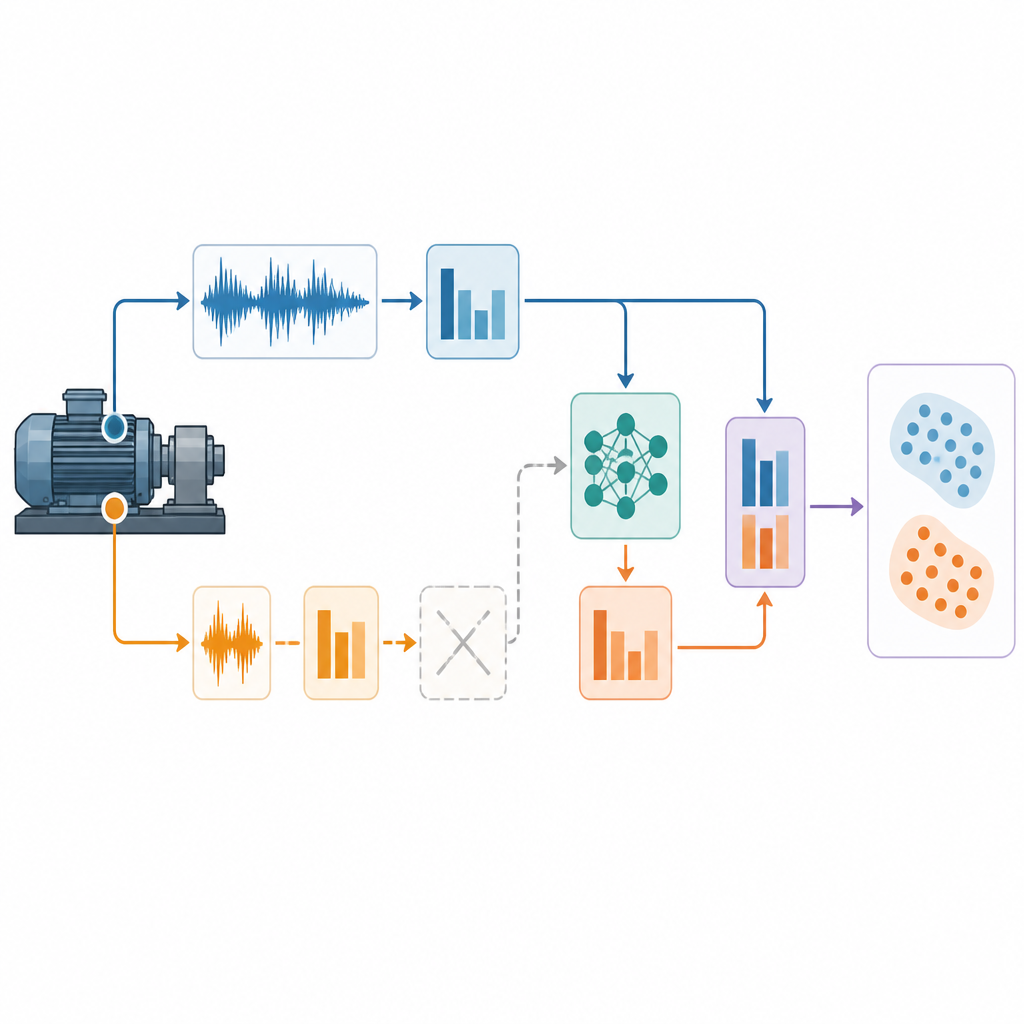
To do this, the method treats vibration signals from two directions at each measuring point as a pair of channels. A shared encoder network processes each channel separately, turning raw waveforms into compact feature vectors that capture the timing and strength of impacts caused by damage. By using multiple filter sizes and attention mechanisms, the encoder highlights fault‑related impulses while toning down background structural noise and effects from sensor placement. The result is a dual‑channel description of how a component is behaving at any moment.

Finding the common language of faults
Machines in different labs, or even different robots, rarely operate in exactly the same way. Speeds, loads, and mechanical layouts all shift the vibration patterns, which makes it easy for a model to latch onto machine‑specific quirks instead of true fault signs. To avoid this trap, the authors introduce a "set‑level" mechanism that groups features from the same type of fault across all machines and both channels. These groups are pulled toward shared "prototypes" that act like semantic centers for each health state, such as normal, inner‑race damage, or outer‑race damage in a bearing. By encouraging all samples of the same fault to cluster around a single prototype, the network learns intrinsic fault representations that are stable across machines and operating conditions, rather than overfitting to any one rig.
Healing missing sensor channels
In real factories, sensors can fail, cables can loosen, or a channel can go silent without warning. Standard multi‑sensor diagnostic systems often break down when that happens, because their training assumed that all inputs were present. To handle this, the team adds a "channel self‑healing" module. During training, when both channels are available, two small networks learn how to translate features from one channel into the other. This teaches the model the typical relationship between vibration seen in different directions. Later, if one channel fails, the system uses the surviving channel to reconstruct a plausible replacement for the missing one in feature space. A semantic constraint, tied back to the fault prototypes, keeps the reconstructed features consistent with known fault categories.
Testing under noise, changing speeds, and failures
The method is tested using three datasets as "teachers" and two as "students". The teachers include well‑known bearing and gearbox benches that run at steady and varying speeds. The students mimic robot joints more closely: one is a planetary gearbox dominated by harsh gear noise, and the other records bearings during a rapid 0–40–0 Hz speed sweep that resembles a robot arm starting and stopping. In some tests, extra white noise is added to make conditions even harsher, and in others, one sensor channel is deliberately set to zero to simulate complete failure. Across these cases, the proposed method consistently outperforms seven advanced baseline techniques, keeping accuracy high even under strong noise, extreme speed changes, and single‑channel loss.
What this means for real robot lines
For a non‑specialist, the key message is that the authors have built a way to transfer health knowledge from lab machines to working robots without needing new fault data from each robot in advance. By learning a common "fault language" across machines and by recreating information from failed sensors, the system can still flag damaged gears or bearings when conditions are noisy, fast‑changing, or partially blind. This does not eliminate the need for careful engineering or maintenance, but it moves closer to reliable, always‑on monitoring that keeps industrial robots running safely and reduces unexpected stoppages on the factory floor.
Citation: Yao, Z., Zhao, H., Wang, Y. et al. Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure. Sci Rep 16, 15921 (2026). https://doi.org/10.1038/s41598-026-47066-9
Keywords: industrial robots, fault diagnosis, vibration monitoring, sensor failure, domain generalization