Clear Sky Science · de
Fehlerdiagnose von Antriebskomponenten industrieller Roboter über maschinenübergreifende Fehlerdarstellung und kanalinterne Selbstheilung bei Sensorausfall
Warum die Gesundheit von Roboter‑Gelenken wichtig ist
Industrieroboter sorgen leise dafür, dass Fabriken laufen: Sie schweißen Karosserien, bewegen Teile und bearbeiten empfindliche Komponenten. Im Inneren jedes Roboterarms arbeiten verborgene Zahnräder und Lager unter hoher Belastung und kontinuierlichem Stop‑and‑Go‑Betrieb. Wenn diese Bauteile verschleißen, zeigen sich die ersten Anzeichen als winzige Änderungen in den Schwingungen. Solche Frühwarnungen in der Praxis zu erkennen ist schwierig, weil Lärm, wechselnde Geschwindigkeiten und sogar ausgefallene Sensoren Probleme verschleiern können. Diese Studie untersucht eine neue Art, Roboter‑Gelenke zu „hören“, selbst wenn einige Sensoren ausfallen, indem aus Schwingungsdaten gelernt wird, die an anderen Maschinen im Labor gesammelt wurden.
Auf Schwingungen über viele Maschinen hören
Die Forschenden konzentrieren sich auf das Antriebssystem in einem Roboter‑Gelenk, wo Motoren, Lager und spezielle Getriebe Steuerbefehle in präzise Bewegung umsetzen. Diese Bauteile erzeugen Schwingungsmuster, die sich bei Fehlern wie Verschleiß oder Rissen verändern. Anstatt für jeden Roboter ein detailliertes physikalisches Modell zu bauen, verwendet das Team datengetriebene Methoden: Es sammelt Schwingungssignale von mehreren öffentlichen Prüfständen mit Lagern und Getrieben, die unter verschiedenen Drehzahlen und Lasten betrieben werden. Die zentrale Idee ist, allgemeine Fehler‑Muster aus diesen einfacheren Maschinen zu lernen und dieses Wissen dann auf komplexe Roboter‑Gelenke anzuwenden, die während des Trainings nie gesehen wurden.
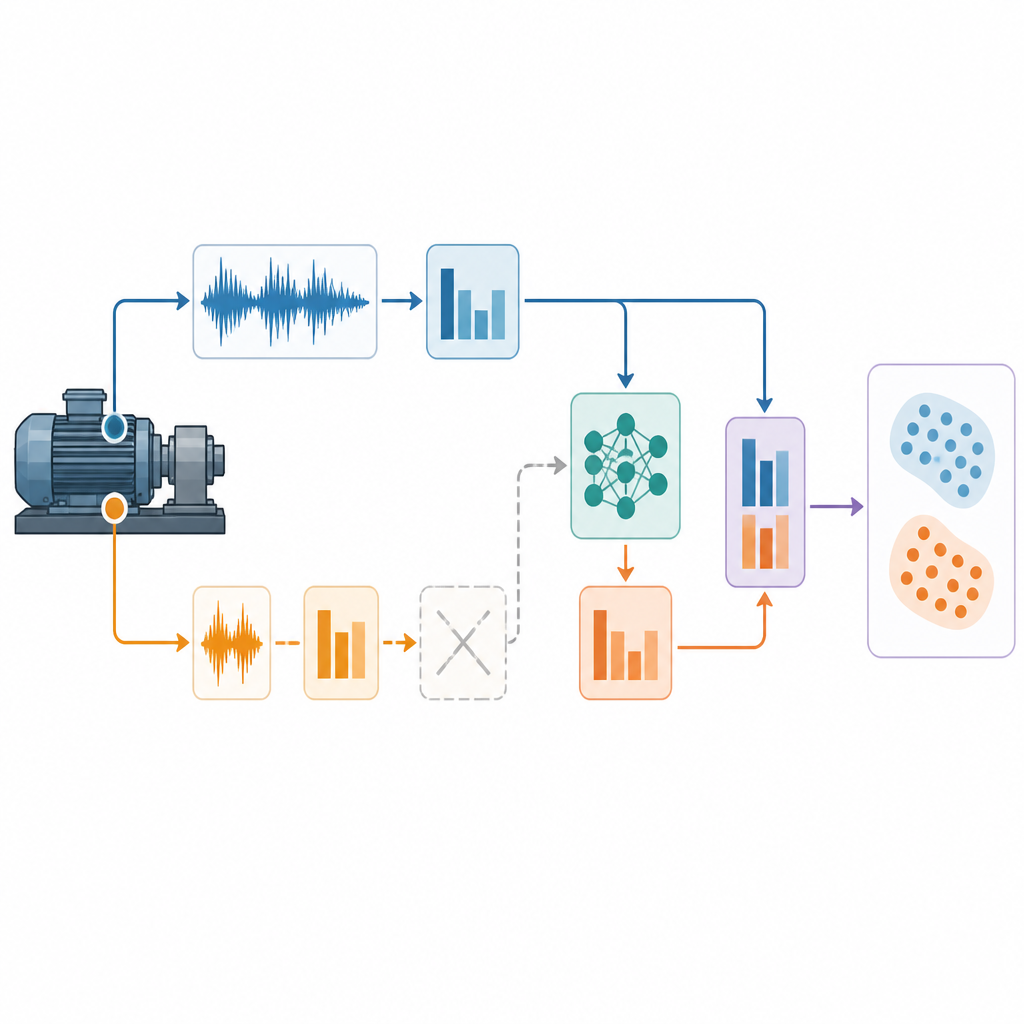
Hierzu behandelt die Methode Schwingungssignale aus zwei Richtungen an jedem Messpunkt als Kanalpaar. Ein gemeinsamer Encoder‑Netzwerk verarbeitet jeden Kanal separat und wandelt rohe Wellenformen in kompakte Merkmalsvektoren um, die das Timing und die Stärke von Impulsen durch Schäden erfassen. Durch die Nutzung mehrerer Filtergrößen und Aufmerksamkeitsmechanismen hebt der Encoder fehlerbezogene Impulse hervor und dämpft gleichzeitig strukturellen Hintergrundlärm und Effekte durch Sensorplatzierung. Das Ergebnis ist eine zweikanalige Beschreibung des Verhaltens einer Komponente in jedem Moment.

Die gemeinsame Sprache der Fehler finden
Maschinen in unterschiedlichen Laboren oder sogar verschiedene Roboter arbeiten selten exakt gleich. Drehzahlen, Lasten und mechanische Anordnungen verändern die Schwingungsmuster, sodass ein Modell leicht an maschinenspezifischen Eigenheiten festhält statt an echten Fehlersignalen. Um diese Falle zu vermeiden, führen die Autoren einen „Set‑Level“-Mechanismus ein, der Merkmale desselben Fehlertyps über alle Maschinen und beide Kanäle gruppiert. Diese Gruppen werden zu gemeinsamen „Prototypen“ hin gezogen, die als semantische Zentren für jeden Gesundheitszustand fungieren, etwa normal, Innenring‑ oder Außenring‑Schaden bei einem Lager. Indem alle Proben desselben Fehlers um einen einzelnen Prototypen gruppiert werden, lernt das Netzwerk intrinsische Fehlerdarstellungen, die über Maschinen und Betriebsbedingungen hinweg stabil sind, statt sich an einen einzelnen Prüfstand anzupassen.
Fehlende Sensorkanäle heilen
In realen Fabriken können Sensoren ausfallen, Kabel sich lockern oder ein Kanal unerwartet stumm werden. Klassische Mehrsensor‑Diagnosesysteme versagen oft dann, weil ihr Training vorausgesetzt hat, dass alle Eingaben vorhanden sind. Um damit umzugehen, ergänzt das Team ein „Kanal‑Selbstheilungs“‑Modul. Während des Trainings, wenn beide Kanäle verfügbar sind, lernen zwei kleine Netzwerke, wie Merkmale von einem Kanal in den anderen übersetzt werden. Das lehrt das Modell die typische Beziehung zwischen Schwingungen in verschiedenen Richtungen. Später, wenn ein Kanal ausfällt, nutzt das System den vorhandenen Kanal, um im Merkmalsraum einen plausiblen Ersatz für den fehlenden zu rekonstruieren. Eine semantische Einschränkung, die an die Fehlerprototypen gekoppelt ist, sorgt dafür, dass die rekonstruierten Merkmale mit den bekannten Fehlerkategorien konsistent bleiben.
Tests unter Rauschen, wechselnden Geschwindigkeiten und Ausfällen
Die Methode wurde mit drei Datensätzen als „Lehrern“ und zwei als „Schülern“ getestet. Zu den Lehrern gehören bekannte Lager‑ und Getriebeprüfstände, die mit gleichbleibenden und variierenden Drehzahlen betrieben werden. Die Schüler ahmen Roboter‑Gelenke näher nach: Einer ist ein Planetengetriebe, das von rauem Getriebe‑Geräusch dominiert wird, der andere zeichnet Lager während eines schnellen 0–40–0‑Hz‑Drehzahlablaufs auf, der dem Anlaufen und Abbremsen eines Roboterarms ähnelt. In einigen Tests wird zusätzlich weißes Rauschen eingemischt, um die Bedingungen zu verschärfen, in anderen wird absichtlich ein Sensor‑Kanal auf Null gesetzt, um kompletten Ausfall zu simulieren. Über alle Fälle hinweg übertrifft die vorgeschlagene Methode durchgängig sieben fortgeschrittene Basisverfahren und hält die Genauigkeit hoch, selbst bei starkem Rauschen, extremen Geschwindigkeitsänderungen und Verlust eines Einzelkanals.
Was das für reale Roboterlinien bedeutet
Für Nicht‑Spezialisten lautet die Kernbotschaft: Die Autoren haben einen Weg entwickelt, Gesundheitswissen von Labor‑Maschinen auf im Betrieb befindliche Roboter zu übertragen, ohne für jeden Roboter im Voraus neue Fehlerdaten zu benötigen. Indem sie eine gemeinsame „Fehler‑Sprache“ über Maschinen hinweg lernen und Informationen aus ausgefallenen Sensoren nachbilden, kann das System weiterhin beschädigte Zahnräder oder Lager melden, wenn die Bedingungen laut, schnell wechselnd oder teilweise blind sind. Das beseitigt nicht die Notwendigkeit sorgfältiger Ingenieurarbeit oder Wartung, bringt aber die Überwachung einen Schritt näher zu einer zuverlässigen, jederzeit aktiven Lösung, die Industrieroboter sicherer laufen lässt und unerwartete Stillstände in der Produktion reduziert.
Zitation: Yao, Z., Zhao, H., Wang, Y. et al. Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure. Sci Rep 16, 15921 (2026). https://doi.org/10.1038/s41598-026-47066-9
Schlüsselwörter: Industrieroboter, Fehlerdiagnose, Schwingungsüberwachung, Sensorausfall, Domänen‑Generalisierung