Clear Sky Science · nl
Foutdiagnose van transmissiecomponenten van industriële robots over meerdere machines via intrinsieke foutrepresentatie en kanaalzelfgenezing bij sensoruitval
Waarom het belangrijk is om robotgewrichten gezond te houden
Industriële robots houden fabrieken stilletjes draaiende: ze lassen carrosserieën, verplaatsen onderdelen en bewerken gevoelige componenten. In elke robotarm werken verborgen tandwielen en lagers onder zware belastingen en constant stoppen‑en‑starten. Wanneer deze onderdelen beginnen te slijten, zijn de eerste tekenen kleine veranderingen in trillingsgedrag. Die vroege waarschuwingen opmerken is lastig in de praktijk, waar ruis, variërende snelheden en zelfs kapotte sensoren problemen kunnen verbergen. Deze studie onderzoekt een nieuwe manier om naar robotgewrichten te "luisteren", zelfs wanneer sommige sensoren uitvallen, door te leren van trillingsdata die op andere machines in het lab zijn verzameld.
Naar trillingen luisteren over veel machines heen
De onderzoekers richten zich op het transmissiesysteem binnen een robotgewricht, waar motoren, lagers en speciale tandwielkasten besturingscommando’s omzetten in nauwkeurige beweging. Deze onderdelen genereren trillingspatronen die veranderen wanneer zich fouten zoals slijtage of scheuren voordoen. In plaats van voor elk robottype een gedetailleerd fysisch model te bouwen, gebruiken de auteurs data‑gedreven methoden: ze verzamelen trillingssignalen van meerdere openbare testopstellingen uitgerust met lagers en tandwielkasten die onder verschillende snelheden en belastingen draaien. Het centrale idee is om algemene foutpatronen te leren uit deze eenvoudigere machines en die kennis vervolgens toe te passen op complexe robotgewrichten die mogelijk nooit tijdens training zijn gezien.
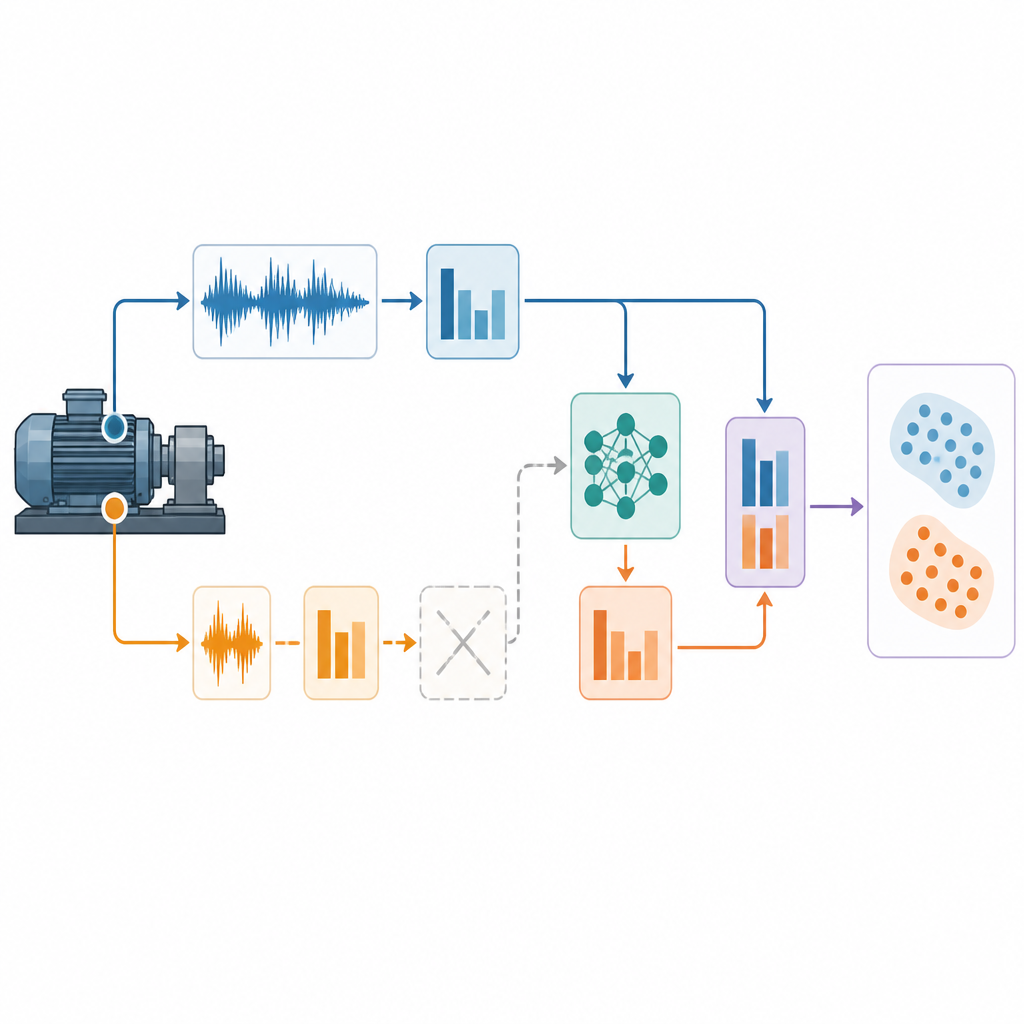
Hiervoor behandelt de methode trillingssignalen in twee richtingen op elk meetpunt als een paar kanalen. Een gedeeld encoder‑netwerk verwerkt elk kanaal afzonderlijk en zet ruwe golfvormen om in compacte featurevectoren die de timing en sterkte van inslagen door schade vangen. Door meerdere filtergroottes en aandachtmechanismen te gebruiken, benadrukt de encoder impulsieve, foutgerelateerde signalen terwijl achtergrondstructurele ruis en effecten van sensorplaatsing worden gedempt. Het resultaat is een dubbelkanaalsbeschrijving van hoe een component zich op elk moment gedraagt.

Het gemeenschappelijke taalgebruik van fouten vinden
Machines in verschillende laboratoria, of zelfs verschillende robots, werken zelden precies hetzelfde. Snelheden, belastingen en mechanische opstellingen verschuiven allemaal de trillingspatronen, waardoor een model gemakkelijk kan vastlopen op machine‑specifieke eigenaardigheden in plaats van op echte foutsignalen. Om deze val te vermijden introduceren de auteurs een "set‑niveau" mechanisme dat features van hetzelfde fouttype over alle machines en beide kanalen groepeert. Deze groepen worden naar gedeelde "prototypen" getrokken die fungeren als semantische centra voor elke gezondheidstoestand, zoals normaal, binnenringschade of buitenringschade in een lager. Door alle monsters van dezelfde fout aan te sporen te laten clusteren rond één prototype, leert het netwerk intrinsieke foutrepresentaties die stabiel zijn over machines en bedrijfsomstandigheden, in plaats van te overfitten op één testopstelling.
Het herstellen van ontbrekende sensorkanalen
In echte fabrieken kunnen sensoren uitvallen, kabels losraken of kan een kanaal zonder waarschuwing stilvallen. Standaard multisensor‑diagnosesystemen falen vaak wanneer dat gebeurt, omdat de training ervan uitging dat alle inputs aanwezig zijn. Om hiermee om te gaan voegt het team een "kanaal zelfgenezing"‑module toe. Tijdens training, wanneer beide kanalen beschikbaar zijn, leren twee kleine netwerken hoe ze features van het ene kanaal naar het andere kunnen vertalen. Dit leert het model de typische relatie tussen trillingen in verschillende richtingen. Later, als één kanaal uitvalt, gebruikt het systeem het overgebleven kanaal om in featurespace een plausibele vervanging voor het ontbrekende kanaal te reconstrueren. Een semantische beperking, gekoppeld aan de foutprototypen, houdt de gereconstrueerde features consistent met bekende foutcategorieën.
Testen onder ruis, variabele snelheden en uitval
De methode is getest met drie datasets als "leraars" en twee als "studenten". De leraren omvatten bekende lager‑ en tandwielbanken die op constante en variërende snelheden draaien. De studenten bootsen robotgewrichten nauwer na: één is een planetaire tandwielkast die gedomineerd wordt door harde tandwielgeluid, en de ander registreert lagers tijdens een snelle 0–40–0 Hz snelheidsveeg die lijkt op het starten en stoppen van een robotarm. In sommige tests wordt extra witte ruis toegevoegd om de omstandigheden nog zwaarder te maken, en in andere wordt één sensor kanaal opzettelijk op nul gezet om volledige uitval te simuleren. In al deze gevallen overtreft de voorgestelde methode consequent zeven geavanceerde basistechnieken, en blijft de nauwkeurigheid hoog, zelfs bij sterke ruis, extreme snelheidsveranderingen en verlies van één kanaal.
Wat dit betekent voor echte robotlijnen
Voor een niet‑specialist is de kernboodschap dat de auteurs een manier hebben ontwikkeld om gezondheidskennis van labmachines naar werkende robots over te dragen zonder dat vooraf nieuwe foutdata van elke robot nodig is. Door een gemeenschappelijke "fouttaal" over machines heen te leren en door informatie van uitgevallen sensoren te reconstrueren, kan het systeem nog steeds beschadigde tandwielen of lagers signaleren wanneer de omstandigheden rumoerig, snel veranderend of gedeeltelijk blind zijn. Dit sluit de behoefte aan zorgvuldige engineering of onderhoud niet uit, maar het brengt ons dichter bij betrouwbare, altijd‑aan monitoring die industriële robots veilig laat draaien en onverwachte stilstanden op de fabrieksvloer vermindert.
Bronvermelding: Yao, Z., Zhao, H., Wang, Y. et al. Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure. Sci Rep 16, 15921 (2026). https://doi.org/10.1038/s41598-026-47066-9
Trefwoorden: industriële robots, foutdiagnose, trillingsmonitoring, sensoruitval, domeinalgemening