Clear Sky Science · he
אבחון תקלות ברכיבי העברה של רובוט תעשייתי חוצה‑מכונות באמצעות ייצוג פנימי של תקלה והרפיית ערוץ עצמית בעת כשל חיישן
מדוע חשוב לשמור על בריאות המפרקים של הרובוט
רובוטים תעשייתיים שומרים על פעילות המפעל בשקט — הם מרתכים שלדות רכב, מזיזים חלקים ומעבדים רכיבים עדינים. בתוך כל זרוע רובוט, גלילים ונושאות גלגלים נסמכים לעומסים כבדים ולתנועות עצירה‑והתחלה תכופות. כשהרכיבים האלה מתחילים להישחק, הסימנים הראשונים הם שינויים זעירים ברטט. זיהוי אותות אזהרה מוקדמים אלה קשה במציאות: רעש רקע, מהירויות משתנות ואפילו חיישנים פגומים עלולים להסתיר בעיות. מחקר זה בוחן דרך חדשה "להקשיב" למפרקי רובוט — גם כשחלק מהחיישנים נכשלו — על ידי למידה מנתוני רטט שנאספו על מכונות אחרות במעבדה.
האזנה לרעידות ברחבי מכונות רבות
חוקרים מתמקדים במערכת ההעברה בתוך מפרק הרובוט, שם מנועים, נושאות ותיבות הילוכים ממירים פקודות בקרה לתנועה מדויקת. רכיבים אלה מפיקים דפוסי רטט שמשתנים כאשר מופיעות תקלות כמו שחיקה או סדקים. במקום לבנות מודל פיזיקלי מפורט לכל רובוט, הצוות משתמש בשיטות מונחות‑נתונים: הם אוספים אותות רטט ממספר ערכות ניסוי פומביות המצוידות בנושאות ותיבות הילוכים שפועלות במהירויות ועומסים שונים. הרעיון המרכזי הוא ללמוד דפוסי תקלה כלליים מהמכונות הפשוטות האלה ולהחיל את הידע על מפרקי רובוט מורכבים שעשויים לא להופיע באימון.
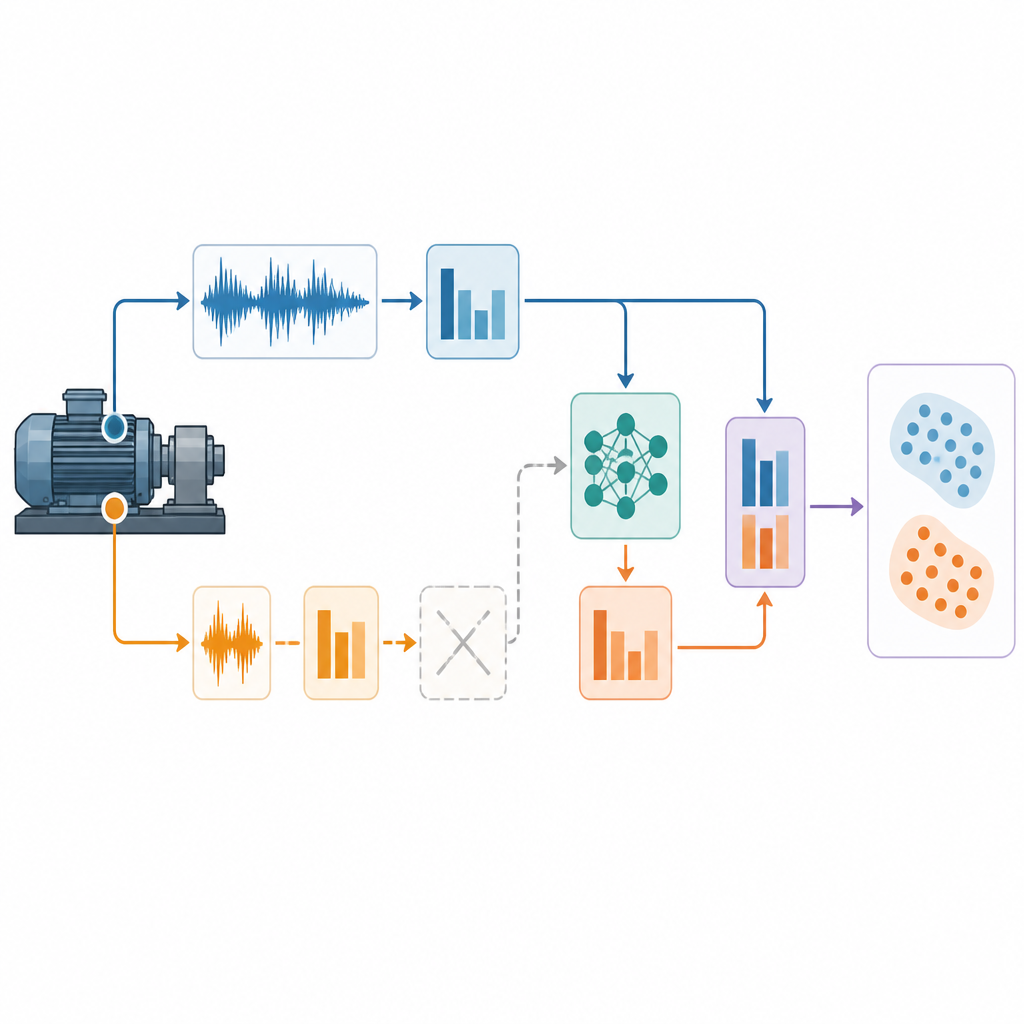
השיטה מתייחסת לאותות רטט משתי כיוונים בכל נקודת מדידה כזוג ערוצים. רשת מקודדת משותפת מעבדת כל ערוץ בנפרד, וממירה צורות גל גולמיות לוקטורי תכונה קומפקטיים שתופסים את תזמון ועוצמת המכות שנגרמות על‑ידי נזק. באמצעות גדלים משתנים של מסננים ומנגנוני תשומת לב, המקודד מדגיש דחפים הקשורים לתקלה ומחליש רעשי מבנה רקע והשפעות מיקום החיישן. התוצאה היא תיאור דו‑ערוצי של התנהגות הרכיב בכל רגע נתון.

מציאת השפה המשותפת של תקלות
מכונות במעבדות שונות, או אפילו רובוטים שונים, נוטות לפעול באופן לא זהה. מהירויות, עומסים ופריסות מכניות משנים את דפוסי הרטט, מה שמקל על מודל להיתפס לתכונות ספציפיות למכונה במקום לסימני תקלה אמיתיים. כדי להימנע ממלכודת זו, המחברים מציגים מנגנון "ברמת־הקבוצה" שמאגד תכונות מאותו סוג תקלה בכל המכונות ובשני הערוצים. קבוצות אלה נמשכות אל "פרוטוטיפים" משותפים שמשמשים כמו מרכזים סמנטיים לכל מצב בריאות — למשל תקין, נזק למסלול פנימי או נזק למסלול חיצוני בנושא. על‑ידי עידוד כל הדגימות של אותה תקלה להתקבץ סביב פרוטוטיפ יחיד, הרשת לומדת ייצוגים פנימיים של תקלות היציבים בין מכונות ותנאי פעולה, במקום להתאמן יתר על המידה על ערכה בודדת.
החלמה של ערוצי חיישן חסרים
במפעלים אמיתיים חיישנים עלולים להיכשל, כבלי חיבור להתרופף או ערוץ להפסיק לשדר בפתאומיות. מערכות אבחון רב‑חיישניות סטנדרטיות בדרך כלל קורסת כשזה קורה, כיוון שהאימון שלהן הניח שכל הקלטים נוכחים. כדי להתמודד עם זה, הצוות מוסיף מודול "החלמה עצמית של ערוץ". במהלך האימון, כאשר שני הערוצים זמינים, שתי רשתות קטנות לומדות לתרגם תכונות מערוץ אחד לאחר. זה מלמד את המודל את הקשר הטיפוסי בין הרטט הנצפה בכיוונים שונים. בהמשך, אם ערוץ אחד נכשל, המערכת משתמשת בערוץ ששרד כדי לשחזר תחליף סביר לערוץ החסר במרחב התכונות. אילוץ סמנטי, המקושר חזרה לפרוטוטיפי התקלה, שומר על כך שהתכונות המשוחזרות עקביות עם קטגוריות התקלות הידועות.
בדיקה תחת רעש, מהירויות משתנות וכשלים
השיטה נבדקה באמצעות שלוש מערכות נתונים כ"מורים" ושתי מערכות כ"תלמידים". המורים כוללים עמדות נושא ותיבת הילוכים ידועות שפועלות במהירויות קבועות ומשתנות. התלמידים מדמים מפרקי רובוט באופן צמוד יותר: אחד הוא תיבת הילוכים פלנטרית שנתונה לרעש חזק של שיניים, והשני מקליט נושאות בזמן סריקת מהירות מהירה 0–40–0 הרץ המזכירה התחלה ועצירה של זרוע רובוטית. במבחנים מסוימים נוסף רעש לבן כדי להקשות עוד יותר, ובאחרים אחד מערוצי החיישן הוגדר במכוון לאפס כדי לדמות כשל מוחלט. בכל המקרים, השיטה המוצעת עוקפת באופן עקבי שבע שיטות בסיס מתקדמות, ושומרת על דיוק גבוה גם ברעש חזק, בשינויים חדים במהירות ובהפסד ערוץ יחיד.
מה המשמעות עבור קווי רובוטים אמיתיים
עבור קורא שאינו מומחה, המסר המרכזי הוא שהמחברים בנו דרך להעביר ידע על בריאות ממכונות מעבדה לרובוטים פועלים ללא צורך בנתוני תקלה חדשים מכל רובוט מראש. על‑ידי למידת "שפת תקלה" משותפת בין מכונות ובאמצעות שיחזור מידע מחיישנים כושלים, המערכת יכולה עדיין להצביע על גלגלים או נושאות פגומים כאשר התנאים רועשים, משתנים במהירות או חלקית עיוורים. זה אינו מבטל את הצורך בהנדסה ובתחזוקה זהירה, אך מקרב את האפשרות לניטור אמין, תמיד‑פועל, שישמור על רובוטים תעשייתיים בטוחים ויפחית עצירות בלתי‑צפויות על רצפת הייצור.
ציטוט: Yao, Z., Zhao, H., Wang, Y. et al. Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure. Sci Rep 16, 15921 (2026). https://doi.org/10.1038/s41598-026-47066-9
מילות מפתח: רובוטים תעשייתיים, אבחון תקלות, ניטור רטט, כשל חיישן, הכללה בין תחומים