Clear Sky Science · ja
産業用ロボットの伝達部品における機械横断故障診断:故障の内在表現とセンサ故障下でのチャネル自己修復
ロボット関節の健全性を保つことが重要な理由
産業用ロボットは工場の稼働を静かに支え、車体の溶接、部品の搬送、精密部品の加工などを行います。各ロボットアームの内部では、見えない歯車やベアリングが大きな荷重と絶え間ない停止・駆動の繰り返しで働いています。これらの部品が摩耗し始めると、最初に現れる兆候はわずかな振動の変化です。実環境ではノイズ、速度変動、さらにはセンサの断線が問題を隠してしまい、早期検出は難しくなります。本研究は、実験室の別の機械で収集した振動データから学習することで、いくつかのセンサが故障していてもロボット関節の“声”を聞く新しい方法を探ります。
多数の機械にわたる振動の“聴取”
研究者らはロボット関節内の伝達系、すなわちモータ、ベアリング、特殊なギアボックスが制御指令を精密な運動に変える部分に着目します。これらの部品は、摩耗や亀裂などの故障が生じると振動パターンが変化します。各ロボットごとに詳細な物理モデルを構築する代わりに、チームはデータ駆動の手法を採用します。複数の公的な試験リグから、異なる速度や負荷条件下で動作するベアリングやギアボックスの振動信号を収集し、より単純な機械から一般的な故障パターンを学習して、その知識を訓練時に一度も見たことのない複雑なロボット関節へ応用することを目指します。
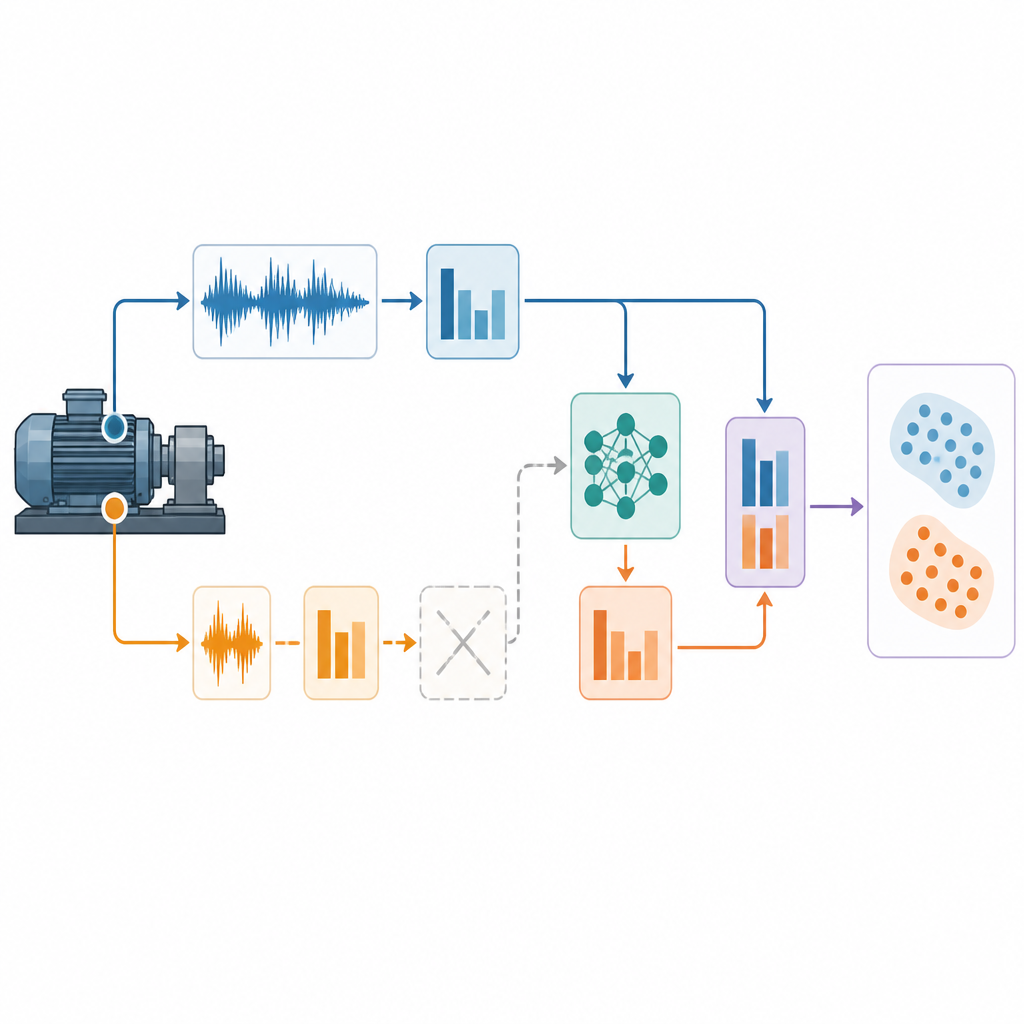
この手法では、各計測点の二方向の振動信号をチャネルのペアとして扱います。共有エンコーダネットワークが各チャネルを個別に処理し、生波形をダメージによる衝撃のタイミングや強さを捉えたコンパクトな特徴ベクトルに変換します。複数のフィルタサイズと注意機構を用いることで、エンコーダは故障に関連するインパルスを強調し、構造的な背景ノイズやセンサ配置の影響を抑えます。その結果、ある瞬間にコンポーネントがどのように振る舞っているかを示す二チャネルの記述が得られます。

故障の共通言語を見つける
異なる研究室や異なるロボットの機械は、ほとんど同じ条件で動作することはありません。速度、負荷、機械配置の違いは振動パターンを変化させ、モデルが真の故障兆候ではなく機械固有の特徴に引きずられる原因になります。この落とし穴を避けるため、著者らは同一の故障タイプに属する全機械・全チャネルからの特徴を集める“セットレベル”の仕組みを導入します。これらの群は、正常やベアリングの内輪/外輪損傷といった各健康状態の意味的中心として機能する共有の「プロトタイプ」に引き寄せられます。同一故障の全サンプルが単一のプロトタイプの周りに集まるよう促すことで、ネットワークは特定のリグに過剰適合するのではなく、機械や動作条件を超えて安定した故障の内在表現を学習します。
欠落したセンサチャネルの修復
実際の工場では、センサが故障したりケーブルが緩んだり、チャネルが予告なく無音になることがあります。従来のマルチセンサ診断システムは、すべての入力が存在することを前提に学習しているため、こうした状況で機能しなくなることが多いです。これに対処するため、チームは「チャネル自己修復」モジュールを追加します。訓練時に両チャネルが利用可能なとき、二つの小さなネットワークが一方のチャネルの特徴を他方に変換する方法を学習します。これにより異なる方向で観測される振動間の典型的な関係がモデルに教え込まれます。後に一方のチャネルが故障した場合、生き残ったチャネルを使って特徴空間上で欠落チャネルの妥当な代替を再構築します。プロトタイプに結びつけられた意味的制約により、再構築された特徴は既知の故障カテゴリと整合するよう保たれます。
ノイズ、速度変化、故障下での検証
この手法は三つのデータセットを“教師”として、二つを“生徒”として用いてテストされています。教師には、一定速度や変動速度で動作する著名なベアリングおよびギアボックスの試験台が含まれます。生徒はロボット関節をより忠実に模したもので、ひとつは激しいギアノイズが支配的な遊星ギアボックス、もうひとつはロボットアームの始動・停止を想起させる急速な0–40–0 Hzの速度掃引中のベアリング記録です。ある試験では条件をさらに過酷にするためホワイトノイズを追加し、別の試験では片側のセンサチャネルを意図的にゼロにして完全故障を模擬します。これらのケース全体で、提案手法は七つの高度なベースライン手法を一貫して上回り、強いノイズ、極端な速度変化、単一チャネル喪失下でも高い精度を維持しました。
実際のロボットラインへの示唆
専門外の読者にとっての要点は、著者らがラボ機械から稼働中ロボットへ健康情報を移転する方法を構築し、各ロボットから事前に新たな故障データを収集する必要を減らしたことです。機械間で共通の「故障言語」を学習し、故障したセンサから情報を再現することで、ノイズが大きく、速度が急変し、一部視界不良な状況でもギアやベアリングの損傷を検知できます。これは慎重な設計や保守の必要性を完全に排除するものではありませんが、産業用ロボットを安全に稼働させ、工場の予期せぬ停止を減らすための常時稼働する信頼できる監視に一歩近づけるものです。
引用: Yao, Z., Zhao, H., Wang, Y. et al. Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure. Sci Rep 16, 15921 (2026). https://doi.org/10.1038/s41598-026-47066-9
キーワード: 産業用ロボット, 故障診断, 振動監視, センサ故障, ドメイン一般化