Clear Sky Science · fr
Diagnostic des défauts des composants de transmission de robots industriels entre machines via représentation intrinsèque des défauts et auto‑réparation de canal en cas de défaillance du capteur
Pourquoi il est important de préserver la santé des articulations robotisées
Les robots industriels maintiennent silencieusement le fonctionnement des usines : ils soudent les carrosseries, déplacent des pièces et usinent des composants délicats. À l’intérieur de chaque bras robotisé, des engrenages et des paliers dissimulés travaillent sous de fortes charges et des mouvements continus d’arrêt‑et‑démarrage. Lorsque ces éléments commencent à s’user, les premiers signes sont de très faibles variations de vibration. Repérer ces signaux précoces est difficile dans le monde réel, où le bruit, la variation des vitesses et même des capteurs défaillants peuvent masquer les problèmes. Cette étude explore un nouveau moyen « d’écouter » les articulations des robots, même lorsque certains capteurs tombent en panne, en apprenant à partir de données de vibration collectées sur d’autres machines en laboratoire.
Écouter les vibrations à travers de nombreuses machines
Les auteurs se concentrent sur le système de transmission à l’intérieur d’une articulation robotisée, où moteurs, paliers et boîtes d’engrenages transforment les commandes en mouvements précis. Ces éléments génèrent des motifs de vibration qui évoluent lorsqu’apparaissent des défauts comme l’usure ou des fissures. Plutôt que de construire un modèle physique détaillé pour chaque robot, l’équipe utilise des méthodes basées sur les données : elle collecte des signaux de vibration provenant de plusieurs bancs d’essai publics équipés de paliers et d’engrenages fonctionnant à différentes vitesses et charges. L’idée centrale est d’apprendre des motifs de défaut généraux à partir de ces machines plus simples puis d’appliquer ce savoir aux articulations complexes de robots qui n’ont peut‑être jamais été vues lors de l’entraînement.
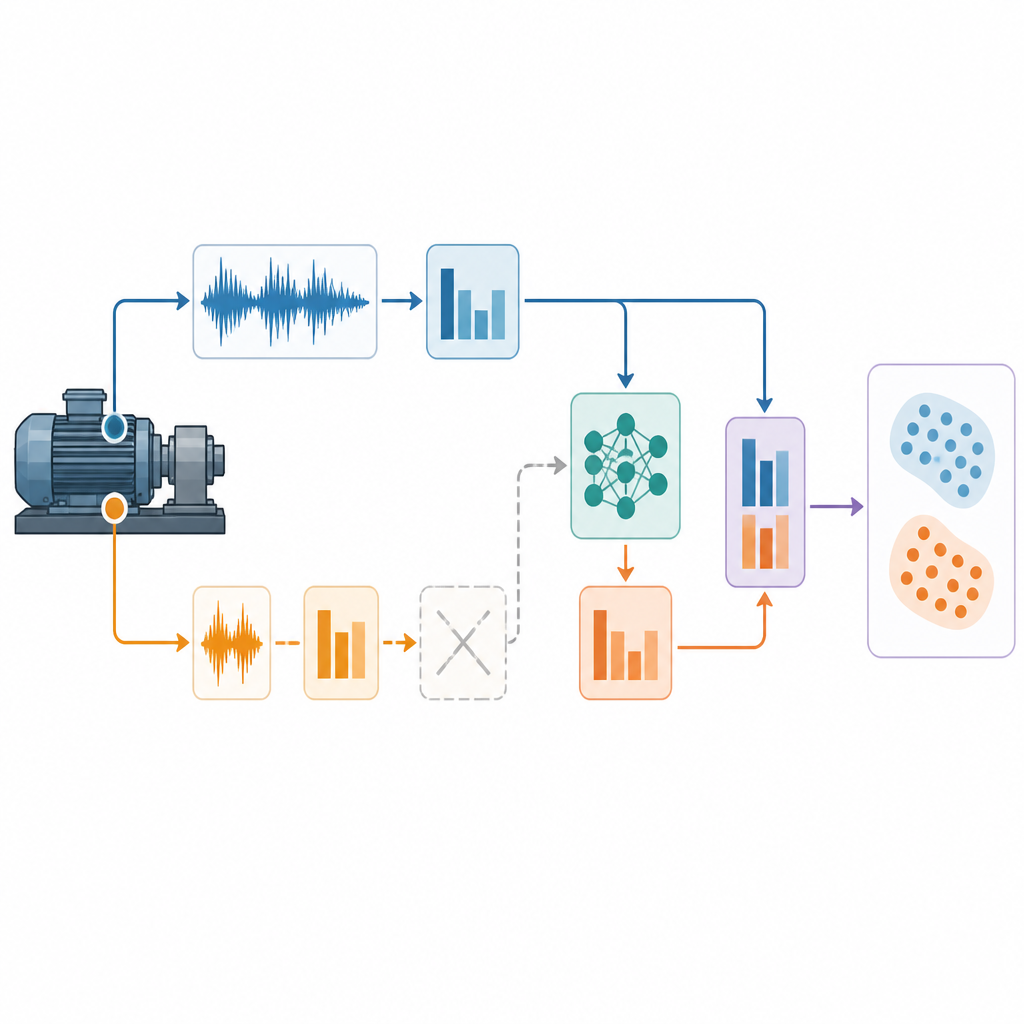
Pour cela, la méthode considère les signaux de vibration dans deux directions à chaque point de mesure comme une paire de canaux. Un réseau encodeur partagé traite chaque canal séparément, transformant les formes d’onde brutes en vecteurs de caractéristiques compacts qui capturent le timing et l’intensité des impacts causés par les dommages. En utilisant plusieurs tailles de filtres et des mécanismes d’attention, l’encodeur met en valeur les impulsions liées aux défauts tout en atténuant le bruit structurel de fond et les effets liés au positionnement des capteurs. Le résultat est une description bicannale du comportement d’un composant à un instant donné.

Trouver le langage commun des défauts
Les machines dans différents laboratoires, ou même différents robots, n’opèrent que rarement de la même manière. Vitesses, charges et configurations mécaniques modifient les motifs de vibration, ce qui incite facilement un modèle à se fixer sur des particularités propres à une machine plutôt que sur de véritables signes de défaut. Pour éviter ce piège, les auteurs introduisent un mécanisme « au niveau de l’ensemble » qui regroupe les caractéristiques du même type de défaut issues de toutes les machines et des deux canaux. Ces groupes sont attirés vers des « prototypes » partagés qui jouent le rôle de centres sémantiques pour chaque état de santé, par exemple normal, défaut de la piste intérieure ou défaut de la piste extérieure pour un palier. En encourageant tous les échantillons d’un même défaut à se regrouper autour d’un prototype unique, le réseau apprend des représentations intrinsèques des défauts qui restent stables à travers les machines et les conditions de fonctionnement, plutôt que de sur‑adapter à un seul banc d’essai.
Auto‑réparation des canaux de capteurs manquants
Dans les usines réelles, les capteurs peuvent tomber en panne, des câbles se desserrer ou un canal peut se taire sans prévenir. Les systèmes de diagnostic multi‑capteurs classiques se dégradent souvent dans ces cas parce que leur entraînement supposait la présence de toutes les entrées. Pour gérer cela, l’équipe ajoute un module d’« auto‑réparation de canal ». Lors de l’entraînement, quand les deux canaux sont disponibles, deux petits réseaux apprennent à traduire les caractéristiques d’un canal vers l’autre. Cela enseigne au modèle la relation typique entre les vibrations observées dans différentes directions. Plus tard, si un canal échoue, le système utilise le canal survivant pour reconstituer un substitut plausible du canal manquant dans l’espace des caractéristiques. Une contrainte sémantique, reliée aux prototypes de défaut, maintient les caractéristiques reconstruites cohérentes avec les catégories de défaut connues.
Tests sous bruit, variations de vitesse et pannes
La méthode est évaluée en utilisant trois jeux de données en tant que « professeurs » et deux en tant qu’« étudiants ». Les professeurs incluent des bancs bien connus de paliers et d’engrenages fonctionnant à vitesses constantes et variées. Les étudiants reproduisent plus fidèlement les articulations robotisées : l’un est une boîte planétaire dominée par un bruit d’engrènement agressif, et l’autre enregistre des paliers lors d’une rampe rapide de 0–40–0 Hz qui ressemble au démarrage et à l’arrêt d’un bras robotisé. Dans certains tests, du bruit blanc supplémentaire est ajouté pour durcir encore les conditions, et dans d’autres, un canal de capteur est délibérément mis à zéro pour simuler une panne complète. Dans tous ces cas, la méthode proposée surpasse de manière constante sept techniques de référence avancées, maintenant une précision élevée même sous fort bruit, changements extrêmes de vitesse et perte d’un canal.
Qu’est‑ce que cela signifie pour les lignes robotiques réelles
Pour un non‑spécialiste, l’idée centrale est que les auteurs ont construit un moyen de transférer les connaissances de santé des machines de laboratoire aux robots en service sans nécessiter de nouvelles données de défaut pour chaque robot au préalable. En apprenant un « langage des défauts » commun à travers les machines et en recréant l’information des capteurs défaillants, le système peut toujours signaler des engrenages ou des paliers endommagés lorsque les conditions sont bruyantes, à évolution rapide ou partiellement aveugles. Cela n’élimine pas le besoin d’ingénierie soignée ou de maintenance, mais cela rapproche d’une surveillance fiable et continue qui maintient les robots industriels en fonctionnement sûr et réduit les arrêts imprévus sur le plancher de l’usine.
Citation: Yao, Z., Zhao, H., Wang, Y. et al. Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure. Sci Rep 16, 15921 (2026). https://doi.org/10.1038/s41598-026-47066-9
Mots-clés: robots industriels, diagnostic des défauts, surveillance par vibration, défaillance de capteur, généralisation de domaine