Clear Sky Science · es
Diagnóstico de fallos en componentes de transmisión de robots industriales entre máquinas mediante representación intrínseca de fallos y autorreparación de canales ante fallo de sensores
Por qué es importante mantener sanas las articulaciones del robot
Los robots industriales mantienen las fábricas en funcionamiento de forma discreta: sueldan carrocerías, mueven piezas y mecanizan componentes delicados. En el interior de cada brazo robot, engranajes y rodamientos ocultos trabajan bajo cargas elevadas y con movimientos constantes de parada y arranque. Cuando estas piezas empiezan a desgastarse, los primeros indicios son pequeños cambios en las vibraciones. Detectar esas señales tempranas es difícil en el mundo real, donde el ruido, las variaciones de velocidad e incluso sensores averiados pueden ocultar el problema. Este estudio explora una nueva forma de “escuchar” las articulaciones del robot, incluso cuando algunos sensores fallan, aprendiendo a partir de datos de vibración recogidos en otras máquinas del laboratorio.
Escuchar vibraciones en muchas máquinas
Los investigadores se centran en el sistema de transmisión dentro de una articulación del robot, donde motores, rodamientos y cajas de engranajes convierten las órdenes de control en movimiento preciso. Estas piezas generan patrones de vibración que cambian cuando aparecen fallos como desgaste o grietas. En lugar de construir un modelo físico detallado para cada robot, el equipo emplea métodos basados en datos: recogen señales de vibración de varios bancos de ensayo públicos equipados con rodamientos y engranajes que funcionan a diferentes velocidades y cargas. La idea central es aprender patrones de fallo generales a partir de estas máquinas más simples y luego aplicar ese conocimiento a articulaciones robóticas complejas que pueden no haber sido vistas durante el entrenamiento.
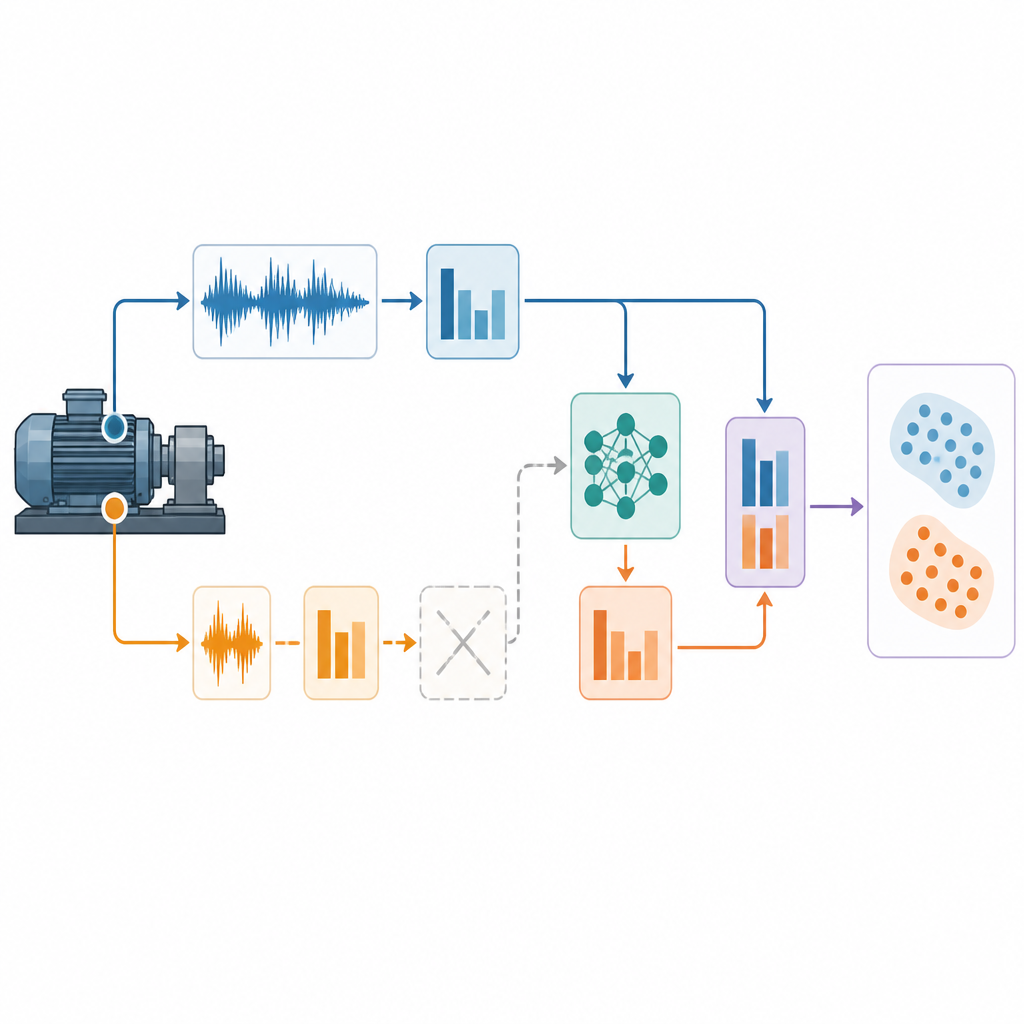
Para ello, el método trata las señales de vibración en dos direcciones en cada punto de medida como un par de canales. Una red codificadora compartida procesa cada canal por separado, transformando las formas de onda crudas en vectores de características compactos que capturan la temporalidad y la intensidad de los impactos provocados por daños. Al usar múltiples tamaños de filtro y mecanismos de atención, el codificador resalta los impulsos relacionados con fallos mientras atenúa el ruido estructural de fondo y los efectos derivados de la colocación del sensor. El resultado es una descripción de doble canal sobre el comportamiento de un componente en cada instante.

Encontrar el lenguaje común de los fallos
Las máquinas en distintos laboratorios, o incluso distintos robots, rara vez operan exactamente igual. Velocidades, cargas y configuraciones mecánicas modifican los patrones de vibración, lo que facilita que un modelo se agarre a peculiaridades específicas de la máquina en lugar de a señales reales de fallo. Para evitar esa trampa, los autores introducen un mecanismo a nivel de conjunto que agrupa características del mismo tipo de fallo a través de todas las máquinas y ambos canales. Estos grupos se atraen hacia “protótipos” compartidos que actúan como centros semánticos para cada estado de salud, como normal, daño en la pista interna o daño en la pista externa de un rodamiento. Al fomentar que todas las muestras del mismo fallo se agrupen alrededor de un único prototipo, la red aprende representaciones intrínsecas del fallo que son estables entre máquinas y condiciones de operación, en lugar de sobreajustarse a un banco concreto.
Autorreparación de canales de sensor ausentes
En fábricas reales, los sensores pueden fallar, los cables aflojarse o un canal quedar en silencio sin previo aviso. Los sistemas de diagnóstico multi-sensor estándar a menudo se vienen abajo en esos casos, porque su entrenamiento asumía que todas las entradas estaban presentes. Para manejar esto, el equipo añade un módulo de “autorreparación de canales”. Durante el entrenamiento, cuando ambos canales están disponibles, dos pequeñas redes aprenden a traducir características de un canal al otro. Esto enseña al modelo la relación típica entre la vibración observada en distintas direcciones. Más tarde, si un canal falla, el sistema utiliza el canal superviviente para reconstruir un reemplazo plausible del ausente en el espacio de características. Una restricción semántica, vinculada a los prototipos de fallo, mantiene las características reconstruidas coherentes con las categorías de fallo conocidas.
Pruebas con ruido, cambios de velocidad y fallos
El método se prueba usando tres conjuntos de datos como “profesores” y dos como “estudiantes”. Los profesores incluyen bancos de ensayo bien conocidos de rodamientos y cajas de engranajes que funcionan a velocidades constantes y variables. Los estudiantes imitan más de cerca las articulaciones de robots: uno es una caja planetaria dominada por ruido fuerte de engranajes, y el otro registra rodamientos durante una barrida rápida de velocidad 0–40–0 Hz que se parece al arranque y la parada de un brazo robot. En algunas pruebas se añade ruido blanco extra para endurecer las condiciones, y en otras se pone deliberadamente a cero un canal de sensor para simular una falla completa. En todos estos casos, el método propuesto supera de forma consistente a siete técnicas de referencia avanzadas, manteniendo la precisión alta incluso bajo ruido intenso, cambios extremos de velocidad y pérdida de un solo canal.
Qué significa esto para líneas robóticas reales
Para un público no especialista, el mensaje clave es que los autores han desarrollado una forma de transferir conocimiento sobre el estado de salud desde máquinas de laboratorio a robots en servicio sin necesitar datos de fallo nuevos de cada robot por adelantado. Al aprender un “lenguaje de fallos” común entre máquinas y al recrear información de sensores averiados, el sistema puede seguir señalando engranajes o rodamientos dañados cuando las condiciones son ruidosas, variables o parcialmente ciegas. Esto no elimina la necesidad de una ingeniería y un mantenimiento cuidadosos, pero acerca la monitorización fiable y continua que mantiene los robots industriales funcionando con seguridad y reduce paradas inesperadas en la planta.
Cita: Yao, Z., Zhao, H., Wang, Y. et al. Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure. Sci Rep 16, 15921 (2026). https://doi.org/10.1038/s41598-026-47066-9
Palabras clave: robots industriales, diagnóstico de fallos, monitorización de vibraciones, fallo de sensor, generalización entre dominios