Clear Sky Science · tr
Endüstriyel robot aktarım bileşenlerinde makinalar arası arıza teşhisi: arızanın içsel temsili ve sensör arızası altında kanal kendi‑kendini iyileştirme
Robot eklemlerinin sağlıklı kalmasının önemi
Endüstriyel robotlar, fabrika hatlarını sessizce işlettirir; otomobil gövdelerini kaynar, parçaları taşır ve hassas bileşenleri işler. Her robot kolunun içinde, gizli dişliler ve rulmanlar ağır yükler altında ve sürekli dur‑başla hareketlerle çalışır. Bu parçalar aşınmaya başladığında ilk belirtiler küçük titreşim değişimleri olarak ortaya çıkar. Gerçek dünyada bu erken uyarıları fark etmek zordur; gürültü, değişen hızlar ve hatta bozuk sensörler sorunu gizleyebilir. Bu çalışma, bazı sensörler arızalansa bile laboratuvarda toplanmış titreşim verilerinden öğrenerek robot eklemlerini "dinlemenin" yeni bir yolunu araştırıyor.
Birçok makinede titreşimleri dinlemek
Araştırmacılar, motorların, rulmanların ve özel dişli kutularının kontrol komutlarını hassas harekete dönüştürdüğü bir robot ekleminde bulunan aktarım sistemine odaklanıyor. Bu bileşenler, aşınma veya çatlak gibi arızalar ortaya çıktığında değişen titreşim desenleri üretir. Her robot için ayrıntılı bir fiziksel model kurmak yerine ekip veri odaklı yöntemleri kullanıyor: farklı hızlar ve yükler altında çalışan rulman ve dişli kutularına sahip birkaç açık test düzeneğinden titreşim sinyalleri topluyorlar. Temel fikir, bu daha basit makinelerden genel arıza kalıplarını öğrenmek ve sonra bu bilgiyi eğitim sırasında hiç görülmemiş olabilecek karmaşık robot eklemlerine uygulamak.
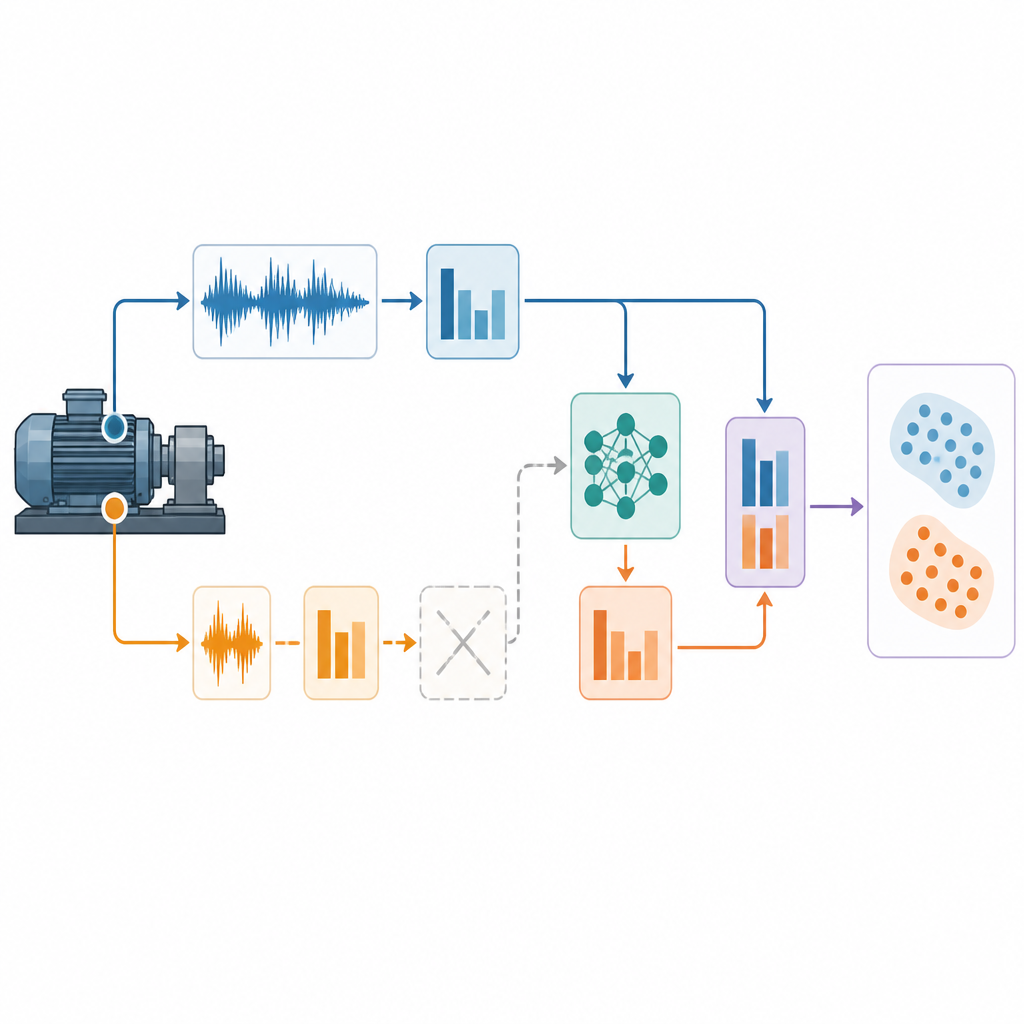
Bunu yapmak için yöntem, her ölçüm noktasında iki yönden gelen titreşim sinyallerini bir kanal çifti olarak ele alıyor. Ortak bir kodlayıcı ağı her kanalı ayrı ayrı işler ve ham dalga formlarını, hasarın neden olduğu darbelerin zamanlaması ve şiddetini yakalayan sıkıştırılmış özellik vektörlerine dönüştürür. Birden çok filtre boyutu ve dikkat mekanizmaları kullanılarak, kodlayıcı arıza ile ilişkili impulsları vurgularken yapısal arka plan gürültüsünü ve sensör yerleşiminden kaynaklanan etkileri azaltır. Sonuç, bir bileşenin herhangi bir anda nasıl davrandığını tanımlayan çift kanallı bir betimlemedir.

Arızaların ortak dilini bulmak
Farklı laboratuvarlardaki makineler veya farklı robotlar nadiren tam olarak aynı şekilde çalışır. Hızlar, yükler ve mekanik düzenlemeler titreşim desenlerini değiştirir; bu da bir modelin gerçek arıza işaretleri yerine makineye özgü tuhaflıklara takılmasını kolaylaştırır. Bu tuzaktan kaçınmak için yazarlar, aynı arıza türünden gelen özellikleri tüm makineler ve her iki kanal genelinde gruplayan bir "set‑düzey" mekanizma tanıtıyor. Bu gruplar, normal, iç eşik hasarı veya dış eşik hasarı gibi her sağlık durumu için anlamsal merkezler gibi davranan paylaşılan "prototipler"e doğru çekilir. Aynı arızaya ait tüm örnekleri tek bir prototip etrafında kümelenmeye teşvik ederek ağ, belirli bir test düzeneğine aşırı uyum yapmak yerine makineler ve çalışma koşulları arasında stabil kalan içsel arıza temsillerini öğrenir.
Eksik sensör kanallarını iyileştirme
Gerçek fabrikalarda sensörler arızalanabilir, kablolar gevşeyebilir veya bir kanal aniden sessizleşebilir. Standart çoklu sensör teşhis sistemleri, tüm girdilerin mevcut olduğu varsayımıyla eğitildikleri için bu durumda sık sık çöker. Bunu ele almak için ekip bir "kanal kendi‑kendini iyileştirme" modülü ekliyor. Eğitim sırasında her iki kanal da mevcutken, iki küçük ağ bir kanaldaki özellikleri diğerine nasıl çevireceklerini öğrenir. Bu, farklı yönlerde görülen titreşimler arasındaki tipik ilişkiyi modele öğretir. Daha sonra bir kanal arızalanırsa, sistem hayatta kalan kanalı kullanarak özellik uzayında eksik kanal için makul bir ikame yeniden oluşturur. Arıza prototiplerine bağlı bir anlamsal kısıt, yeniden oluşturulan özelliklerin bilinen arıza kategorileriyle tutarlı kalmasını sağlar.
Gürültü, değişen hızlar ve arızalar altında test
Yöntem, üç veri seti "öğretmen" ve iki veri seti "öğrenci" olarak kullanılarak test edilir. Öğretmenler, sabit ve değişken hızlarda çalışan iyi bilinen rulman ve dişli standlarını içerir. Öğrenciler robot eklemlerini daha yakından taklit eder: biri sert diş gürültüsünün baskın olduğu bir planet dişli kutusudur; diğeri ise bir robot kolunun başlama ve durma davranışını andıran hızlı bir 0–40–0 Hz hız süpürmesi sırasında rulman kayıtları içerir. Bazı testlerde koşulları daha zorlu hale getirmek için ekstra beyaz gürültü eklenir, bazılarında ise bir sensör kanalı kasıtlı olarak sıfıra ayarlanarak tam arıza simüle edilir. Bu senaryoların tümünde önerilen yöntem, yedi gelişmiş temel tekniği sürekli olarak geride bırakarak güçlü gürültü, aşırı hız değişimleri ve tek kanallı kayıp altında bile doğruluğu yüksek tutar.
Gerçek robot hatları için anlamı
Uzman olmayan bir kişi için ana mesaj şudur: Yazarlar, her robot için önceden yeni arıza verilerine ihtiyaç duymadan laboratuvar makinelerinden çalışma bilgisi aktaran bir yöntem geliştirmişlerdir. Makineler arasında ortak bir "arıza dili" öğrenerek ve arızalanmış sensörlerden bilgiyi yeniden yaratarak sistem, koşullar gürültülü, hızlı değişen veya kısmen kör olsa bile hasarlı dişlileri veya rulmanları yine de işaretleyebilir. Bu, dikkatli mühendislik veya bakım ihtiyacını ortadan kaldırmaz; ancak sürekli, güvenilir izlemeye doğru bir adım atarak endüstriyel robotların güvenli çalışmasını sağlamaya ve fabrika hattındaki beklenmedik duruşları azaltmaya yardımcı olur.
Atıf: Yao, Z., Zhao, H., Wang, Y. et al. Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure. Sci Rep 16, 15921 (2026). https://doi.org/10.1038/s41598-026-47066-9
Anahtar kelimeler: endüstriyel robotlar, arıza teşhisi, titreşim izleme, sensör arızası, alan genellemesi