Clear Sky Science · pt
Diagnóstico de falhas em componentes de transmissão de robôs industriais entre máquinas via representação intrínseca de falhas e autorreparo de canal sob falha de sensor
Por que manter as juntas dos robôs saudáveis importa
Robôs industriais mantêm as fábricas funcionando discretamente, soldando carrocerias, movimentando peças e usinando componentes delicados. Dentro de cada braço robótico, engrenagens e rolamentos ocultos trabalham sob altas cargas e movimento constante de parar e arrancar. Quando essas peças começam a se desgastar, os primeiros sinais são pequenas mudanças nas vibrações. Detectar esses avisos precoces é difícil no mundo real, onde ruído, variação de velocidade e até sensores quebrados podem ocultar problemas. Este estudo explora uma nova forma de “ouvir” as juntas dos robôs, mesmo quando alguns sensores falham, aprendendo com dados de vibração coletados em outras máquinas no laboratório.
Ouvindo vibrações em várias máquinas
Os pesquisadores concentram‑se no sistema de transmissão dentro de uma junta robótica, onde motores, rolamentos e caixas de engrenagens transformam comandos em movimento preciso. Essas peças geram padrões de vibração que mudam quando surgem falhas, como desgaste ou trincas. Em vez de construir um modelo físico detalhado para cada robô, a equipe usa métodos baseados em dados: coletam sinais de vibração de vários bancadas de teste públicos equipados com rolamentos e caixas de engrenagens operando em diferentes velocidades e cargas. A ideia central é aprender padrões gerais de falhas a partir dessas máquinas mais simples e então aplicar esse conhecimento a juntas robóticas complexas que nunca foram vistas durante o treinamento.
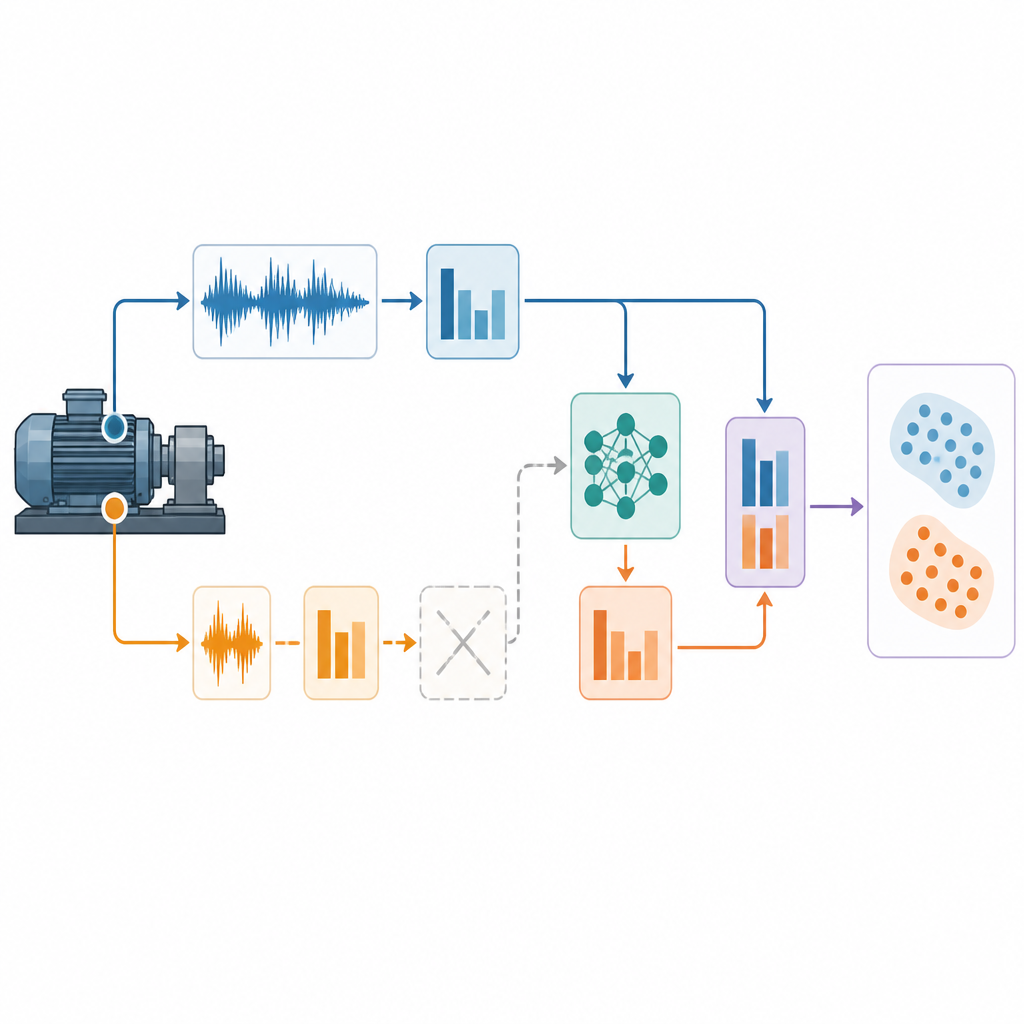
Para isso, o método trata sinais de vibração em duas direções em cada ponto de medição como um par de canais. Uma rede codificadora compartilhada processa cada canal separadamente, convertendo formas de onda brutas em vetores de características compactos que capturam o tempo e a intensidade dos impactos causados por danos. Ao usar múltiplos tamanhos de filtro e mecanismos de atenção, o codificador destaca impulsos relacionados a falhas enquanto atenua ruído estrutural de fundo e efeitos da posição do sensor. O resultado é uma descrição de canal duplo de como um componente está se comportando em cada instante.

Encontrando a linguagem comum das falhas
Máquinas em laboratórios diferentes, ou mesmo robôs distintos, raramente operam exatamente da mesma forma. Velocidades, cargas e configurações mecânicas mudam os padrões de vibração, o que facilita que um modelo se prenda a idiossincrasias específicas da máquina em vez de sinais verdadeiros de falha. Para evitar essa armadilha, os autores introduzem um mecanismo em nível de conjunto que agrupa características do mesmo tipo de falha em todas as máquinas e em ambos os canais. Esses grupos são atraídos para “protótipos” compartilhados que atuam como centros semânticos para cada estado de saúde, como normal, dano na pista interna ou dano na pista externa de um rolamento. Ao incentivar que todas as amostras da mesma falha se agrupem em torno de um único protótipo, a rede aprende representações intrínsecas de falhas que são estáveis entre máquinas e condições de operação, em vez de se ajustar excessivamente a um único banco de teste.
Autorreparo de canais de sensores faltantes
No ambiente fabril real, sensores podem falhar, cabos afrouxar ou um canal pode silenciar sem aviso. Sistemas de diagnóstico multissensor padrão frequentemente falham nessas situações, porque o treinamento assumiu que todas as entradas estariam presentes. Para lidar com isso, a equipe acrescenta um módulo de “autorreparo de canal”. Durante o treinamento, quando ambos os canais estão disponíveis, duas pequenas redes aprendem a traduzir características de um canal para o outro. Isso ensina ao modelo a relação típica entre as vibrações observadas em direções diferentes. Depois, se um canal falhar, o sistema usa o canal sobrevivente para reconstruir uma substituição plausível para o canal ausente no espaço de características. Uma restrição semântica, vinculada aos protótipos de falha, mantém as características reconstruídas consistentes com as categorias de falha conhecidas.
Testes sob ruído, variação de velocidade e falhas
O método é testado usando três conjuntos de dados como “professores” e dois como “alunos”. Os professores incluem bancadas de rolamentos e caixas de engrenagens bem conhecidas que operam em velocidades constantes e variáveis. Os alunos imitam juntas robóticas mais de perto: um é uma caixa planetária dominada por ruído intenso de engrenagens, e o outro registra rolamentos durante uma varredura rápida de velocidade 0–40–0 Hz que se assemelha ao início e parada de um braço robótico. Em alguns testes, ruído branco extra é adicionado para tornar as condições ainda mais adversas, e em outros, um canal de sensor é deliberadamente posto a zero para simular falha completa. Nesses cenários, o método proposto supera consistentemente sete técnicas de referência avançadas, mantendo alta acurácia mesmo sob ruído intenso, mudanças extremas de velocidade e perda de um único canal.
O que isso significa para linhas de robôs reais
Para um público não especializado, a mensagem principal é que os autores desenvolveram uma forma de transferir conhecimento de saúde de máquinas de laboratório para robôs em operação sem precisar de novos dados de falha de cada robô antecipadamente. Ao aprender uma “língua de falhas” comum entre máquinas e ao recriar informações de sensores que falharam, o sistema pode ainda sinalizar engrenagens ou rolamentos danificados quando as condições são ruidosas, de rápida variação ou parcialmente cegas. Isso não elimina a necessidade de engenharia cuidadosa ou manutenção, mas aproxima‑se de um monitoramento confiável e sempre ativo que mantém robôs industriais funcionando com segurança e reduz paradas inesperadas no chão de fábrica.
Citação: Yao, Z., Zhao, H., Wang, Y. et al. Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure. Sci Rep 16, 15921 (2026). https://doi.org/10.1038/s41598-026-47066-9
Palavras-chave: robôs industriais, diagnóstico de falhas, monitoramento por vibração, falha de sensor, generalização de domínio