Clear Sky Science · ar
تشخيص أعطال مكونات نقل الحركة في الروبوتات الصناعية عبر تمثيل جوهري للخلل والشفاء الذاتي للقناة عند فشل المستشعر
لماذا الحفاظ على صحة مفاصل الروبوت مهم
تحافظ الروبوتات الصناعية بهدوء على سير المصانع، تلحّم هياكل السيارات، تنقل القطع، وتقوم بعمليات قطع دقيقة. داخل كل ذراع روبوت، تعمل تروس ومحامل مخفية تحت أحمال كبيرة وحركة متقطعة مستمرة. عندما تبدأ هذه الأجزاء في التلف، تكون العلامات الأولى تغيّرات طفيفة في الاهتزاز. رصد هذه التحذيرات المبكرة صعب في العالم الواقعي، حيث يمكن للضوضاء، وتقلب السرعات، وحتى تعطل المستشعرات أن تُخفي المشكلة. تستكشف هذه الدراسة طريقة جديدة لـ"الاستماع" إلى مفاصل الروبوت، حتى عند فشل بعض المستشعرات، من خلال التعلّم من بيانات الاهتزاز المجمعة من آلات أخرى في المختبر.
الاستماع للاهتزازات عبر العديد من الآلات
يركّز الباحثون على نظام نقل الحركة داخل مفصل الروبوت، حيث تحوّل المحركات والمحامل والصناديق التروس الخاصة أوامر التحكم إلى حركة دقيقة. تولّد هذه الأجزاء أنماط اهتزاز تتغير عند ظهور أعطال مثل التآكل أو التشققات. بدلًا من بناء نموذج فيزيائي مفصّل لكل روبوت، يستخدم الفريق أساليب معتمدة على البيانات: يجمعون إشارات الاهتزاز من عدة منصات اختبار عامة مزوّدة بمحامل وصناديق تروس تعمل بسرعات وأحمال مختلفة. الفكرة المركزية هي تعلّم أنماط الأعطال العامة من هذه الآلات الأبسط ثم تطبيق تلك المعرفة على مفاصل روبوت معقدة قد لا تكون قد ظهرت أثناء التدريب.
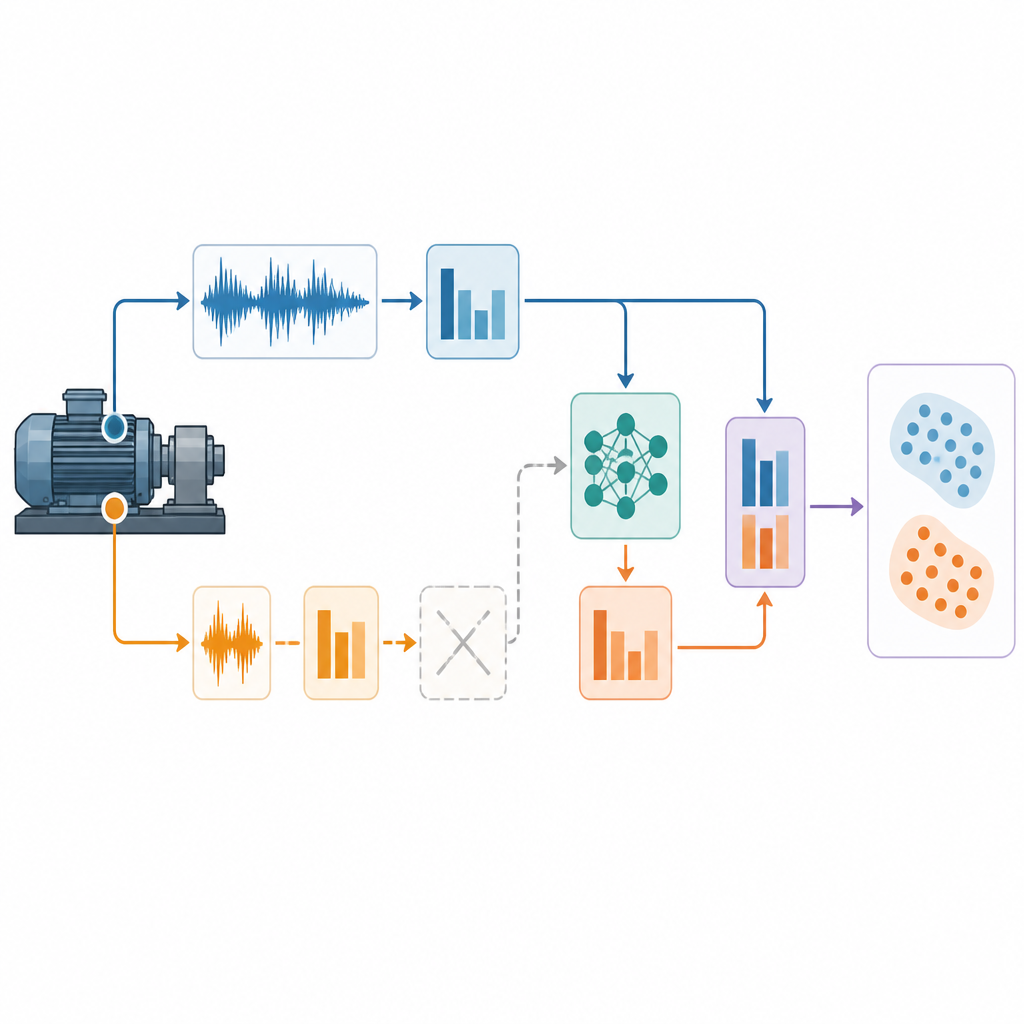
للقيام بذلك، تعامل الطريقة إشارات الاهتزاز القادمة من اتجاهين عند كل نقطة قياس كزوج من القنوات. يعالج مُشفّر مشترك كل قناة بشكل منفصل، محوِّلاً الشكل الموجي الخام إلى متجهات ميزات مُختصرة تلتقط توقيت وقوة الصدمات الناتجة عن التلف. باستخدام أحجام مرشّحات متعددة وآليات انتباه، يُبرِز المُشفّر النبضات المرتبطة بالخلل مع تخفيف الضوضاء الهيكلية وخلافات وضعية المستشعر. النتيجة وصف ثنائي القناة لكيفية تصرف المكوّن في أي لحظة.

إيجاد لغة مشتركة للأعطال
نادرًا ما تعمل الآلات في مختبرات مختلفة، أو حتى روبوتات مختلفة، بالطريقة نفسها تمامًا. فتتغير أنماط الاهتزاز بحسب السرعات والأحمال والتخطيطات الميكانيكية، مما يجعل النموذج يميل إلى التقاط خصائص خاصة بالماكينة بدلًا من علامات الخلل الحقيقية. لتجنّب هذا الفخ، يقدم المؤلفون آلية "مستوى المجموعة" التي تجمع الميزات من نفس نوع الخلل عبر جميع الآلات وكلتا القناتين. تُسحب هذه المجموعات نحو "نماذج أولية" مشتركة تعمل كمراكز دلالية لكل حالة صحة، مثل الحالة الطبيعية أو تلف السباق الداخلي أو الخارجي في المحمل. من خلال تشجيع تجمّع كل عينات نفس الخلل حول نموذج أولي واحد، يتعلّم الشبكة تمثيلات جوهرية للخلل تكون ثابتة عبر الآلات وظروف التشغيل، بدلًا من الإفراط في التكيّف مع منصة اختبار واحدة.
شفاء القنوات المستشعِرة المفقودة
في المصانع الحقيقية، قد تفشل المستشعرات، أو ترتخي الكابلات، أو تصمت قناة فجأة دون إنذار. غالبًا ما تنهار أنظمة التشخيص متعددة المستشعرات القياسية عند حدوث ذلك، لأن تدريبها افترض وجود كل المدخلات. للتعامل مع هذا، يضيف الفريق وحدة "الشفاء الذاتي للقناة". أثناء التدريب، عندما تكون كلتا القناتين متوافرتين، تتعلّم شبكتان صغيرتان كيفية ترجمة الميزات من قناة إلى أخرى. هذا يُعلّم النموذج العلاقة النمطية بين الاهتزاز المرصود في اتجاهات مختلفة. لاحقًا، إذا فشلت إحدى القنوات، يستخدم النظام القناة الباقية لإعادة بناء بديل مُحتمل للقناة المفقودة في فضاء الميزات. قيد دلالي مربوط بنماذج الأعطال يضمن اتساق الميزات المُعاد بناؤها مع فئات الأعطال المعروفة.
الاختبار تحت الضوضاء، وتغيُّر السرعات، وحالات الفشل
اختُبرت الطريقة باستخدام ثلاث مجموعات بيانات كـ"معلمين" ومجموعتين كـ"طلاب". تشمل مجموعات المعلمين منصات محامل وتروس معروفة تعمل بسرعات ثابتة ومتغيرة. تُحاكي مجموعات الطلاب مفاصل روبوت بشكل أوثق: إحداها صندوق تروس كوكبي تُهيمن عليه ضوضاء تروس قوية، والأخرى تسجّل محامل أثناء مسح سرعة سريع 0–40–0 هرتز يشبه بدء وإيقاف ذراع روبوت. في بعض التجارب، يُضاف ضوضاء بيضاء إضافية لجعل الظروف أكثر قسوة، وفي تجارب أخرى تُضبط إحدى قنوات المستشعر عمدًا إلى الصفر لمحاكاة فشل كامل. عبر هذه الحالات، تفوقت الطريقة المقترحة باستمرار على سبع تقنيات أساسية متقدمة، محافظةً على دقة عالية حتى تحت ضوضاء قوية، وتغيّرات سرعة شديدة، وفقدان قناة واحدة.
ماذا يعني هذا لخطوط إنتاج الروبوتات الحقيقية
للغير متخصصين، الرسالة الأساسية أن الباحثين طوروا طريقة لنقل معرفة الصحة من آلات المختبر إلى روبوتات العمل دون الحاجة إلى بيانات أعطال جديدة من كل روبوت مقدمًا. من خلال تعلّم "لغة أعطال" مشتركة عبر الآلات وإعادة خلق المعلومات من المستشعرات المتعطلة، يمكن للنظام أن يظل يَكشف عن التروس والمحامل التالفة عندما تكون الظروف صاخبة، سريعة التغير، أو نصف عمياء. هذا لا يلغي الحاجة إلى هندسة وصيانة دقيقة، لكنه يقرّب نحو مراقبة دائمة وموثوقة تبقي الروبوتات الصناعية تعمل بأمان وتقلّل التوقّفات المفاجئة في المصنع.
الاستشهاد: Yao, Z., Zhao, H., Wang, Y. et al. Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure. Sci Rep 16, 15921 (2026). https://doi.org/10.1038/s41598-026-47066-9
الكلمات المفتاحية: الروبوتات الصناعية, تشخيص الأعطال, مراقبة الاهتزاز, فشل المستشعر, تعميم النطاق (Domain Generalization)