Clear Sky Science · it
Diagnosi dei guasti nei componenti di trasmissione dei robot industriali attraverso rappresentazioni intrinseche dei difetti e autoriparazione dei canali in caso di guasto del sensore
Perché mantenere in salute le giunture dei robot è importante
I robot industriali mantengono silenziosamente operativi gli impianti, saldando scocche d’auto, spostando componenti e lavorando pezzi delicati. All’interno di ogni braccio robotico, ingranaggi e cuscinetti nascosti sopportano carichi elevati e continui movimenti di avvio e arresto. Quando queste parti cominciano a usurarsi, i primi segnali sono piccole variazioni nelle vibrazioni. Individuare questi avvertimenti precoci è difficile nel mondo reale, dove rumore, velocità variabili e persino sensori guasti possono nascondere i problemi. Questo studio esplora un nuovo modo di “ascoltare” le giunture dei robot, anche quando alcuni sensori si guastano, imparando dai dati di vibrazione raccolti su altre macchine in laboratorio.
Ascoltare le vibrazioni attraverso molte macchine
I ricercatori si concentrano sul sistema di trasmissione all’interno di una giuntura robotica, dove motori, cuscinetti e riduttori trasformano i comandi di controllo in movimenti precisi. Queste parti generano pattern di vibrazione che cambiano quando compaiono difetti come l’usura o le crepe. Invece di costruire un modello fisico dettagliato per ogni robot, il team utilizza metodi basati sui dati: raccoglie segnali di vibrazione da diversi banchi di prova pubblici dotati di cuscinetti e ingranaggi che operano a varie velocità e carichi. L’idea centrale è apprendere pattern di guasto generali da queste macchine più semplici e poi applicare quella conoscenza a giunture robotiche complesse che potrebbero non essere mai state viste durante l’addestramento.
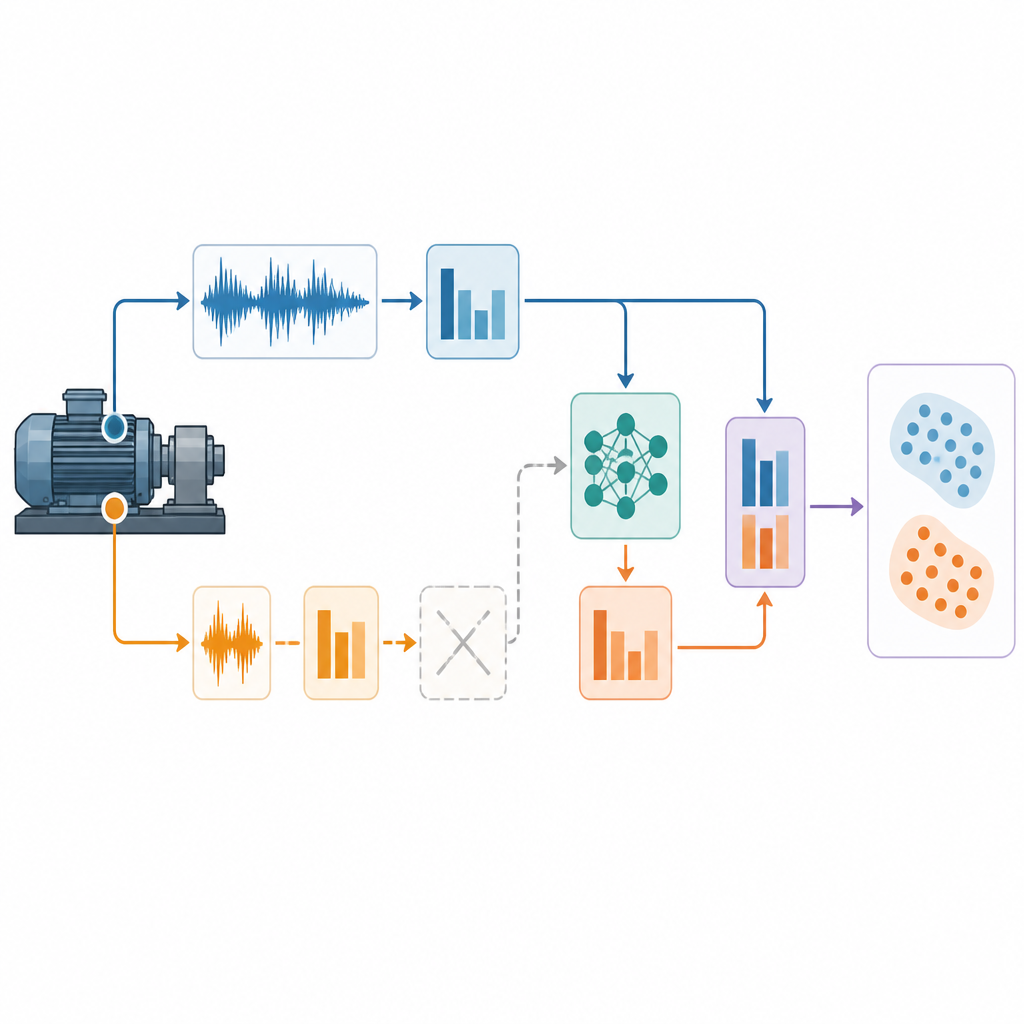
Per farlo, il metodo considera i segnali di vibrazione in due direzioni in ciascun punto di misura come una coppia di canali. Una rete codificatrice condivisa elabora ciascun canale separatamente, trasformando le forme d’onda grezze in vettori di caratteristiche compatti che catturano il tempo e l’intensità degli impatti causati dal danneggiamento. Utilizzando più dimensioni di filtro e meccanismi di attenzione, il codificatore mette in evidenza gli impulsi correlati al guasto attenuando il rumore strutturale di fondo e gli effetti dovuti al posizionamento dei sensori. Il risultato è una descrizione a doppio canale del comportamento del componente in ogni istante.

Trovare il linguaggio comune dei guasti
Le macchine in laboratori diversi, o anche robot differenti, difficilmente operano nello stesso modo. Velocità, carichi e configurazioni meccaniche modificano i pattern di vibrazione, il che rende facile per un modello fissarsi su particolarità specifiche della macchina invece che sui veri segnali di guasto. Per evitare questa trappola, gli autori introducono un meccanismo a “livello di insieme” che raggruppa le caratteristiche dello stesso tipo di guasto provenienti da tutte le macchine e da entrambi i canali. Questi raggruppamenti vengono fatti convergere verso “prototipi” condivisi che fungono da centri semantici per ciascuno stato di salute, come normale, danno alla pista interna o alla pista esterna di un cuscinetto. Incoraggiando tutti i campioni dello stesso guasto a clusterizzarsi attorno a un unico prototipo, la rete apprende rappresentazioni intrinseche dei guasti stabili attraverso macchine e condizioni operative, invece di sovradattarsi a un singolo banco.
Autoriparazione dei canali sensoriali mancanti
Nelle fabbriche reali i sensori possono guastarsi, i cavi possono allentarsi o un canale può rimanere muto senza preavviso. I sistemi diagnostici multisensore standard spesso collassano in queste situazioni, perché l’addestramento presumeva la presenza di tutti gli ingressi. Per gestire il problema, il team aggiunge un modulo di “autoriparazione del canale”. Durante l’addestramento, quando sono disponibili entrambi i canali, due piccole reti imparano a tradurre le caratteristiche da un canale all’altro. Questo insegna al modello la relazione tipica tra le vibrazioni misurate in direzioni diverse. Successivamente, se un canale si guasta, il sistema usa il canale rimasto per ricostruire uno sostitutivo plausibile per il canale mancante nello spazio delle caratteristiche. Un vincolo semantico, richiamato ai prototipi di guasto, mantiene le caratteristiche ricostruite coerenti con le categorie di guasto conosciute.
Test sotto rumore, variazioni di velocità e guasti
Il metodo è testato usando tre dataset come “insegnanti” e due come “studenti”. Gli insegnanti includono banchi ben noti per cuscinetti e ingranaggi che operano a velocità costante e variabile. Gli studenti imitano più da vicino le giunture robotiche: uno è un riduttore planetario dominato da rumore di ingranaggi intenso, e l’altro registra cuscinetti durante una rapida variazione di velocità 0–40–0 Hz che ricorda l’avvio e l’arresto di un braccio robotico. In alcuni test viene aggiunto rumore bianco supplementare per rendere le condizioni più severe, e in altri un canale sensoriale è deliberatamente portato a zero per simulare un guasto completo. In tutti questi casi, il metodo proposto supera costantemente sette tecniche di riferimento avanzate, mantenendo alta l’accuratezza anche sotto forte rumore, variazioni estreme di velocità e perdita di un singolo canale.
Cosa significa per le linee robotiche reali
Per un non specialista, il messaggio chiave è che gli autori hanno costruito un modo per trasferire la conoscenza sullo stato di salute dalle macchine di laboratorio ai robot operativi senza bisogno di nuovi dati di guasto per ciascun robot in anticipo. Apprendendo un “linguaggio dei guasti” comune tra macchine e ricreando le informazioni dei sensori guasti, il sistema può comunque segnalare ingranaggi o cuscinetti danneggiati quando le condizioni sono rumorose, in rapido cambiamento o parzialmente coperte. Questo non elimina la necessità di una progettazione accurata o di manutenzione, ma avvicina a un monitoraggio affidabile e sempre attivo che mantiene i robot industriali operativi in sicurezza e riduce le fermate inattese sul piano di produzione.
Citazione: Yao, Z., Zhao, H., Wang, Y. et al. Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure. Sci Rep 16, 15921 (2026). https://doi.org/10.1038/s41598-026-47066-9
Parole chiave: robot industriali, diagnosi dei guasti, monitoraggio delle vibrazioni, guasto del sensore, generalizzazione del dominio