Clear Sky Science · ru
Диагностика неисправностей компонентов трансмиссии промышленных роботов между машинами посредством внутреннего представления дефектов и самовосстановления каналов при отказе датчика
Почему важно сохранять здоровье сочленений роботов
Промышленные роботы незаметно поддерживают работу заводов: сваривают кузова автомобилей, перемещают детали и обрабатывают точные компоненты. Внутри каждой руки скрытые шестерни и подшипники работают под большими нагрузками и в режиме постоянных остановок и стартов. Когда эти детали начинают изнашиваться, первые признаки проявляются как крошечные изменения в вибрации. Распознавать такие ранние предупреждения в реальном мире сложно: шум, меняющиеся скорости и даже сломанные датчики могут скрыть проблему. В этом исследовании рассматривается новый способ «слушать» сочленения робота, даже если некоторые датчики выходят из строя, — через обучение на данных вибрации, собранных на других машинах в лаборатории.
Слушать вибрации на многих машинах
Исследователи сосредоточены на трансмиссии внутри сочленения робота, где моторы, подшипники и специальные редукторы превращают управляющие команды в точное движение. Эти узлы порождают вибрационные паттерны, которые меняются при дефектах — износе или трещинах. Вместо создания детальной физической модели каждой машины команда использует методы, основанные на данных: они собирают вибрационные сигналы с нескольких публичных стендов, оснащённых подшипниками и редукторами, работающих при разных скоростях и нагрузках. Центральная идея — выучить общие паттерны неисправностей на этих более простых машинах и затем применить это знание к сложным сочленениям роботов, которые могли не встречаться во время обучения.
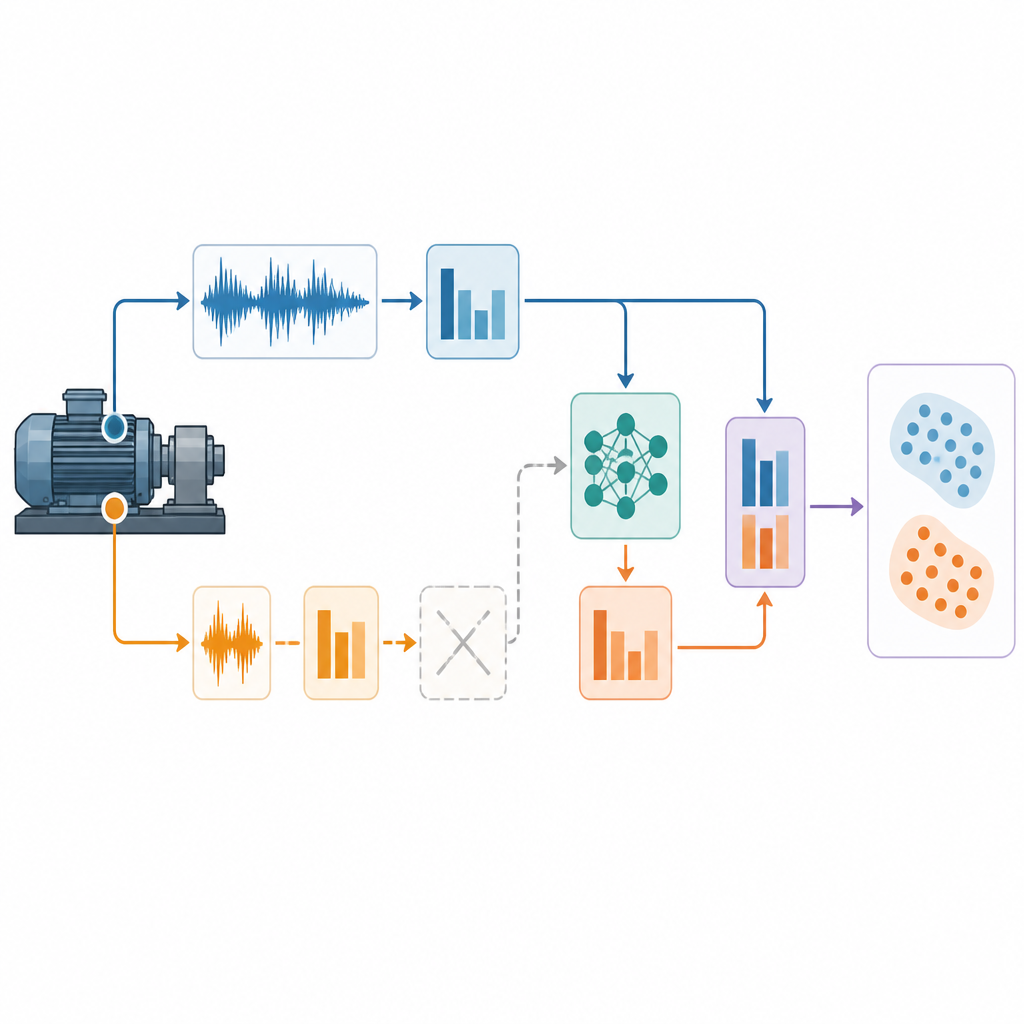
Для этого метод рассматривает вибрационные сигналы в двух направлениях в каждой точке измерения как пару каналов. Общая кодирующая сеть обрабатывает каждый канал отдельно, превращая сырые волновые формы в компактные векторные признаки, которые фиксируют временные и амплитудные характеристики ударов, вызванных повреждением. Используя фильтры разных размеров и механизмы внимания, энкодер выделяет импульсы, связанные с дефектом, уменьшая фоновые структурные шумы и влияние положения датчика. В результате получается двухканальное описание состояния компонента в каждый момент времени.

Поиск общего языка дефектов
Машины в разных лабораториях или даже разные роботы редко работают одинаково. Скорости, нагрузки и механические компоновки изменяют вибрационные паттерны, из‑за чего модели легко уловить специфичные для конкретной машины особенности вместо истинных признаков дефекта. Чтобы избежать этой ловушки, авторы вводят механизм «на уровне множества», который группирует признаки одного и того же типа дефекта со всех машин и обоих каналов. Эти группы стягиваются к общим «прототипам», которые функционируют как семантические центры для каждого состояния здоровья, например — нормальное состояние, повреждение внутренней дорожки или наружной дорожки подшипника. Поощряя все образцы одного и того же дефекта сходиться вокруг одного прототипа, сеть учит внутренние представления дефектов, устойчивые к различиям между машинами и условиями эксплуатации, а не переобучается на отдельный стенд.
Самовосстановление отсутствующих каналов
На реальных производствах датчики могут выходить из строя, кабели ослабевать, или канал внезапно замолкнуть. Обычные многодатчиковые системы диагностики часто перестают работать в таких случаях, потому что обучение предполагало наличие всех входов. Чтобы решить эту проблему, команда добавляет модуль «самовосстановления каналов». Во время обучения, когда оба канала доступны, две небольшие сети учатся переводить признаки из одного канала в другой. Это обучает модель типичным взаимосвязям между вибрацией в разных направлениях. Позже, если один канал выйдет из строя, система использует выживший канал для восстановления правдоподобной замены отсутствующего в пространстве признаков. Семантическое ограничение, связанное с прототипами дефектов, поддерживает согласованность восстановленных признаков с известными категориями неисправностей.
Тестирование в условиях шума, меняющихся скоростей и отказов
Метод протестирован с использованием трёх наборов данных в роли «учителей» и двух в роли «учеников». В состав учителей вошли хорошо известные стенды подшипников и редукторов, работающие на постоянных и переменных скоростях. Ученики ближе имитируют сочленения роботов: один — планетарный редуктор с доминирующим громким шестерённым шумом, другой — запись подшипников при быстром изменении скорости 0–40–0 Гц, напоминающем старт и останов роборуки. В некоторых тестах добавлялся белый шум, чтобы усилить условия, в других — один канал датчика намеренно обнулялся для имитации полного отказа. Во всех этих случаях предложенный метод последовательно превосходит семь современных эталонных техник, поддерживая высокую точность даже при сильном шуме, экстремальных изменениях скорости и потере одного канала.
Что это значит для реальных производственных линий
Для неспециалиста ключевое сообщение заключается в том, что авторы создали способ переносить знания о состоянии машин из лабораторных стендов на рабочие роботы без необходимости заранее собирать данные о дефектах для каждой конкретной машины. Обучаясь общему «языку дефектов» между машинами и восстанавливая информацию из вышедших из строя датчиков, система способна обнаруживать повреждённые шестерни или подшипники в условиях шума, быстрых изменений и частичной слепоты. Это не отменяет необходимости тщательной инженерии и обслуживания, но приближает к надёжному круглосуточному мониторингу, который поддерживает безопасную работу промышленных роботов и снижает неожиданные простои на производстве.
Цитирование: Yao, Z., Zhao, H., Wang, Y. et al. Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure. Sci Rep 16, 15921 (2026). https://doi.org/10.1038/s41598-026-47066-9
Ключевые слова: промышленные роботы, диагностика неисправностей, мониторинг вибраций, отказ датчика, обобщение по доменам