Clear Sky Science · pl
Diagnostyka uszkodzeń elementów przekładni robota przemysłowego między maszynami za pomocą wewnętrznej reprezentacji uszkodzeń i samonaprawy kanału przy awarii czujnika
Dlaczego utrzymanie zdrowia przegubów robotów ma znaczenie
Roboty przemysłowe w ciszy utrzymują pracę zakładów — spawają nadwozia samochodów, przemieszczają części i obrabiają precyzyjne elementy. W każdym ramieniu robota ukryte przekładnie i łożyska pracują pod dużymi obciążeniami i w cyklicznym ruchu start‑stop. Gdy te części zaczynają się zużywać, pierwsze oznaki to drobne zmiany drgań. Wczesne wychwycenie takich sygnałów jest trudne w rzeczywistych warunkach, gdzie hałas, zmienne prędkości, a nawet uszkodzone czujniki mogą ukryć problemy. W pracy tej badacze proponują nowy sposób „nasłuchiwania” przegubów robotów, nawet gdy niektóre czujniki zawodzą, ucząc się na podstawie sygnałów drgań zebranych na innych maszynach w laboratorium.
Nasłuchiwanie drgań na wielu maszynach
Autorzy skupiają się na układzie napędowym wewnątrz przegubu robota, gdzie silniki, łożyska i specjalne skrzynie biegów zamieniają polecenia sterujące w precyzyjny ruch. Te elementy generują wzorce drgań, które zmieniają się przy wadach takich jak zużycie czy pęknięcia. Zamiast budować szczegółowy model fizyczny każdego robota, zespół wykorzystuje podejście oparte na danych: zbierają sygnały drgań z kilku publicznych stanowisk testowych wyposażonych w łożyska i przekładnie pracujące przy różnych prędkościach i obciążeniach. Kluczowy pomysł to nauka ogólnych wzorców uszkodzeń na bazie tych prostszych maszyn, a następnie zastosowanie tej wiedzy do złożonych przegubów robotycznych, które mogły nie pojawić się podczas treningu.
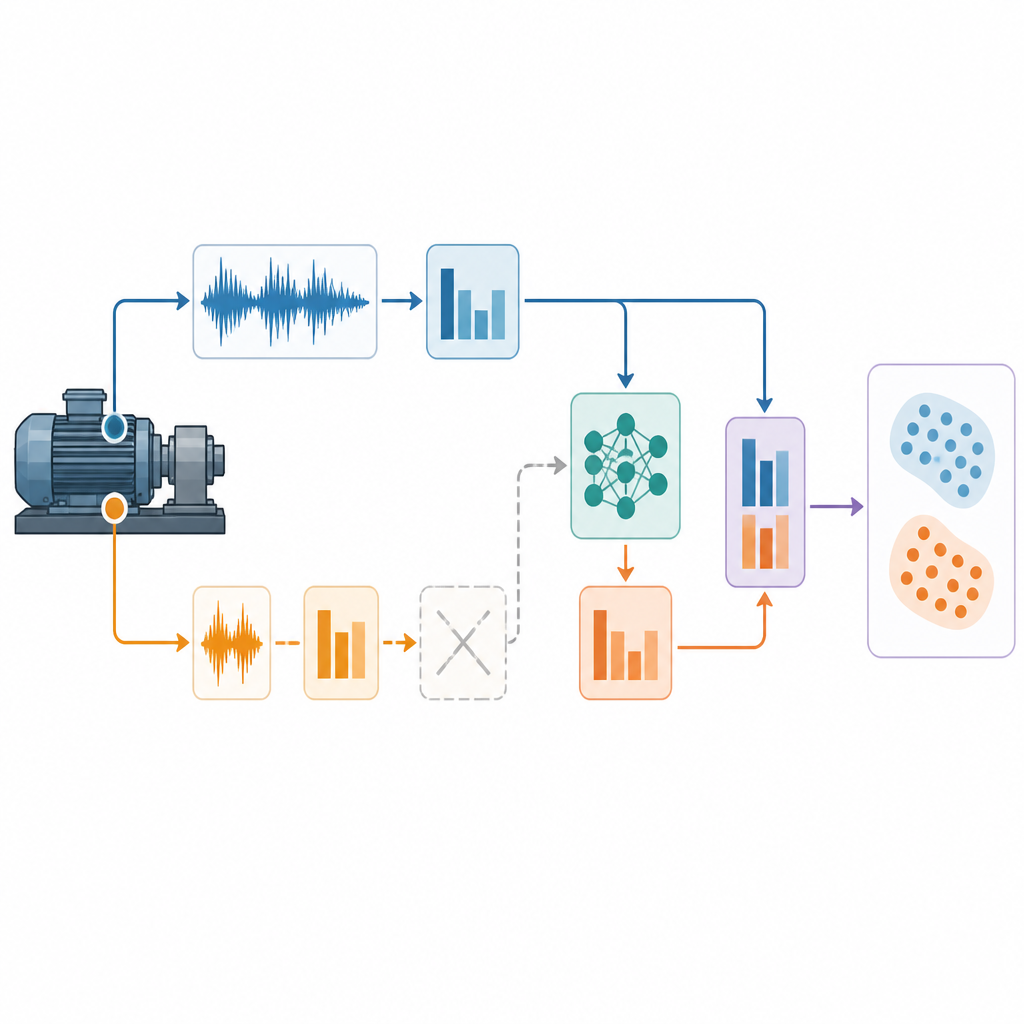
Aby to osiągnąć, metoda traktuje sygnały drgań z dwóch kierunków w każdym punkcie pomiarowym jako parę kanałów. Wspólny enkoder przetwarza każdy kanał oddzielnie, zamieniając surowe przebiegi w zwarte wektory cech, które uchwytują momenty i siłę impulsów powodowanych przez uszkodzenia. Dzięki zastosowaniu filtrów o różnych rozmiarach i mechanizmów uwagi, enkoder uwypukla impulsy związane z usterkami, jednocześnie tłumiąc tło strukturalne i efekty związane z umiejscowieniem czujnika. W efekcie powstaje dwukanałowy opis zachowania komponentu w danym momencie.

Odnalezienie wspólnego języka usterek
Maszyny w różnych laboratoriach, a nawet różne roboty, rzadko działają dokładnie tak samo. Prędkości, obciążenia i układy mechaniczne zmieniają wzorce drgań, co ułatwia modelowi nauczenie się cech specyficznych dla danej maszyny zamiast prawdziwych sygnałów uszkodzeń. Aby uniknąć tej pułapki, autorzy wprowadzają mechanizm „na poziomie zbioru”, który grupuje cechy pochodzące z tego samego rodzaju uszkodzenia ze wszystkich maszyn i obu kanałów. Te grupy są przyciągane do wspólnych „prototypów”, pełniących rolę semantycznych centrów dla każdego stanu zdrowia, na przykład normalnego, uszkodzenia bieżni wewnętrznej lub zewnętrznej w łożysku. Zachęcając wszystkie próbki tego samego uszkodzenia do skupienia się wokół pojedynczego prototypu, sieć uczy się wewnętrznych reprezentacji usterek, które są stabilne między maszynami i warunkami pracy, zamiast dopasowywać się nadmiernie do jednego stanowiska.
Samonaprawa brakujących kanałów czujników
W rzeczywistych zakładach czujniki mogą ulec awarii, kable poluzować, a kanał przestać przesyłać sygnał bez ostrzeżenia. Standardowe systemy diagnostyczne wieloczujnikowe często zawodzą wtedy, ponieważ trening zakładał dostępność wszystkich wejść. Aby sobie z tym poradzić, zespół dodaje moduł „samonaprawy kanału”. Podczas treningu, gdy oba kanały są dostępne, dwie małe sieci uczą się tłumaczyć cechy z jednego kanału na drugi. Uczy to model typowych zależności między drganiami widzianymi w różnych kierunkach. Później, jeśli jeden kanał zawiedzie, system używa pozostałego kanału, by w przestrzeni cech odbudować wiarygodny substytut brakującego kanału. Ograniczenie semantyczne, powiązane z prototypami usterek, sprawia, że zrekonstruowane cechy pozostają spójne z znanymi kategoriami uszkodzeń.
Testy przy hałasie, zmiennych prędkościach i awariach
Metodę przetestowano, używając trzech zbiorów danych jako „nauczycieli” i dwóch jako „uczniów”. Nauczyciele obejmują znane stanowiska testowe łożysk i przekładni pracujące przy stałych i zmiennych prędkościach. Uczniowie naśladują przeguby robotów bardziej realistycznie: jeden to przekładnia planetarna z dominującym szumem zębów, a drugi rejestruje łożyska podczas szybkiego skoku prędkości 0–40–0 Hz przypominającego ruch start‑stop ramienia robota. W niektórych testach dodano dodatkowy biały szum, by zaostrzyć warunki, a w innych jeden kanał czujnika celowo ustawiono na zero, symulując całkowitą awarię. W tych scenariuszach proponowana metoda konsekwentnie przewyższa siedem zaawansowanych technik bazowych, utrzymując wysoką dokładność nawet w warunkach silnego szumu, ekstremalnych zmian prędkości i utraty jednego kanału.
Co to oznacza dla linii produkcyjnych
Dla nietechnika kluczowy wniosek jest taki, że autorzy opracowali sposób przenoszenia wiedzy o stanie zdrowia z maszyn laboratoryjnych na pracujące roboty bez konieczności posiadania nowych danych o uszkodzeniach z każdego robota z wyprzedzeniem. Ucząc wspólnego „języka usterek” między maszynami i odtwarzając informacje z uszkodzonych czujników, system potrafi wykrywać uszkodzenia kół zębatych czy łożysk nawet gdy warunki są hałaśliwe, szybko się zmieniają lub częściowo iluzoryczne. To nie eliminuje potrzeby starannego projektowania czy konserwacji, ale przybliża do niezawodnego, ciągłego monitoringu, który utrzymuje roboty przemysłowe w bezpiecznej pracy i zmniejsza nieoczekiwane przestoje na hali produkcyjnej.
Cytowanie: Yao, Z., Zhao, H., Wang, Y. et al. Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure. Sci Rep 16, 15921 (2026). https://doi.org/10.1038/s41598-026-47066-9
Słowa kluczowe: roboty przemysłowe, diagnostyka usterek, monitorowanie drgań, awaria czujnika, generalizacja domenowa