Clear Sky Science · sv
Felsökning av drivkomponenter i industribots över maskiner via felens inneboende representation och kanalens självläkning vid sensorfel
Varför det är viktigt att hålla robotleder friska
Industrirobotar håller fabrikernas produktion igång i det tysta: svetsar karosser, flyttar detaljer och bearbetar känsliga komponenter. Inuti varje robotarm arbetar dolda växlar och lager under höga belastningar och ständig start‑stopp‑rörelse. När dessa delar börjar slitas ger det första tecknen sig ofta till känna som små förändringar i vibrationer. Att upptäcka dessa tidiga varningssignaler är svårt i verkliga miljöer, där brus, förändrade hastigheter och till och med trasiga sensorer kan dölja problemen. Denna studie utforskar ett nytt sätt att ”lyssna” på robotleder, även när vissa sensorer fallerar, genom att lära från vibrationsdata insamlad på andra maskiner i labbet.
Lyssna på vibrationer över många maskiner
Forskarna fokuserar på transmissionssystemet inne i en robotled, där motorer, lager och specialväxlar omvandlar styrsignaler till exakt rörelse. Dessa delar skapar vibrationsmönster som ändras när fel som slitage eller sprickor uppstår. Istället för att bygga en detaljerad fysisk modell för varje robot använder teamet datadrivna metoder: de samlar vibrationssignaler från flera publika testbänkar utrustade med lager och växlar som körs under olika hastigheter och belastningar. Den centrala idén är att lära sig generella felmönster från dessa enklare maskiner och sedan applicera den kunskapen på komplexa robotleder som kanske aldrig synts under träningen.
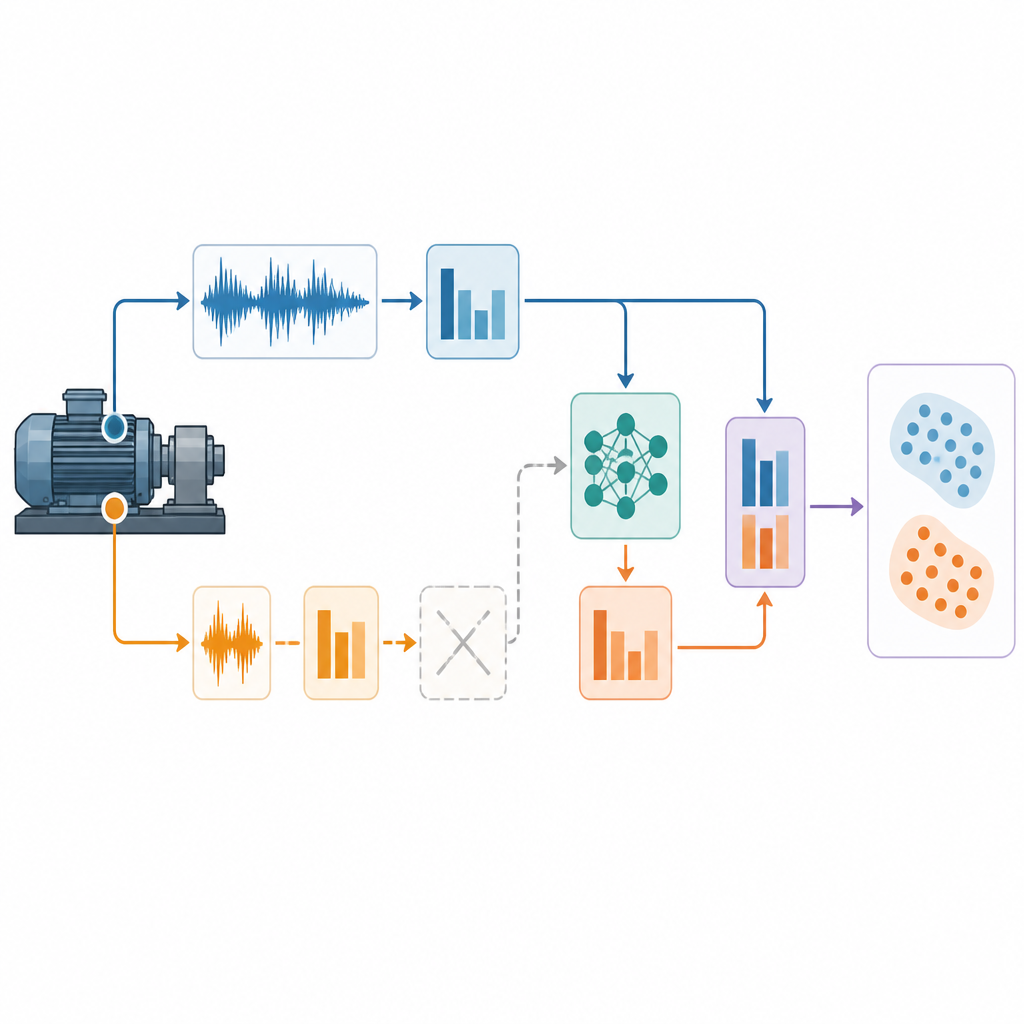
För att göra detta behandlar metoden vibrationssignaler från två riktningar vid varje mätnod som ett par kanaler. Ett delat kodarnätverk bearbetar varje kanal separat och omvandlar råa vågformer till kompakta funktionsvektorer som fångar tidpunkter och styrkan av impulser orsakade av skador. Genom att använda flera filterstorlekar och uppmärksamhetsmekanismer framhäver kodaren felförknippade impulser samtidigt som bakgrundsstrukturellt brus och effekter från sensorplacering dämpas. Resultatet är en tvåkanalig beskrivning av hur en komponent beter sig vid varje ögonblick.

Hitta ett gemensamt fel-språk
Maskiner i olika laboratorier, eller även olika robotar, arbetar sällan exakt likadant. Hastigheter, belastningar och mekaniska layouter förändrar vibrationsmönstren, vilket gör det lätt för en modell att haka upp sig på maskinspecifika egenheter istället för verkliga felsignaler. För att undvika detta introducerar författarna en mekanism på ”set‑nivå” som grupperar egenskaper från samma feltyp över alla maskiner och båda kanalerna. Dessa grupper dras mot delade ”prototyper” som fungerar som semantiska centrum för varje hälsotillstånd, till exempel normalt, inre ringskada eller yttre ringskada i ett lager. Genom att uppmuntra alla prover av samma fel att klustra kring en enda prototyp lär sig nätverket inneboende felrepresentationer som är stabila över maskiner och driftförhållanden, istället för att överanpassa sig till en enskild testbänk.
Självläkning för saknade sensorkanaler
I verkliga fabriker kan sensorer gå sönder, kablar lossna eller en kanal bli tyst utan förvarning. Standard system med flera sensorer fallerar ofta i sådana situationer eftersom träningen antagit att alla ingångar finns tillgängliga. För att hantera detta lägger teamet till en modul för ”kanalens självläkning”. Under träning, när båda kanalerna är tillgängliga, lär sig två små nätverk hur man översätter egenskaper från en kanal till den andra. Detta lär modellen den typiska relationen mellan vibrationer som ses i olika riktningar. Senare, om en kanal fallerar, använder systemet den överlevande kanalen för att rekonstruera en plausibel ersättning för den saknade i funktionsutrymmet. En semantisk begränsning, knuten tillbaka till felprototyperna, håller de rekonstruerade funktionerna förenliga med kända felkategorier.
Testning under brus, varierande hastigheter och fel
Metoden testas med tre dataset som ”lärare” och två som ”studenter”. Lärarna inkluderar välkända lager‑ och växellådsbänkar som körs vid både konstanta och varierande hastigheter. Studenterna efterliknar robotleder mer: en är en planetväxellåda dominerad av kraftigt växelljud, och den andra registrerar lager under en snabb 0–40–0 Hz hastighetsgenomgång som liknar en robotarm som startar och stannar. I vissa tester läggs extra vitt brus till för att göra förhållandena ännu tuffare, och i andra sätts en sensorkanal medvetet till noll för att simulera fullständigt fel. I dessa scenarier överträffar den föreslagna metoden konsekvent sju avancerade referenstekniker och bibehåller hög noggrannhet även under starkt brus, extrema hastighetsförändringar och förlust av en kanal.
Vad detta betyder för verkliga robotlinjer
För en icke‑specialist är huvudbudskapet att författarna byggt ett sätt att överföra hälsokunskap från labbmaskiner till fungerande robotar utan att behöva ny feldata från varje robot i förväg. Genom att lära ett gemensamt ”fel‑språk” över maskiner och genom att återskapa information från fallerade sensorer kan systemet ändå varna för skadade växlar eller lager när förhållanden är brusiga, snabbt föränderliga eller delvis blinda. Detta eliminerar inte behovet av noggrann ingenjörskonst eller underhåll, men det för oss närmare pålitlig, ständigt aktiv övervakning som håller industrins robotar säkra och minskar oväntade stopp på fabriksgolvet.
Citering: Yao, Z., Zhao, H., Wang, Y. et al. Industrial robot transmission components cross-machines fault diagnosis via fault intrinsic representation and channel self-healing under sensor failure. Sci Rep 16, 15921 (2026). https://doi.org/10.1038/s41598-026-47066-9
Nyckelord: industrirobotar, felsökning, vibrationsövervakning, sensorfel, domängeneraliering