Clear Sky Science · zh
用于增材制造的开源机器人辅助设备在三维曲面结构制造中的评估
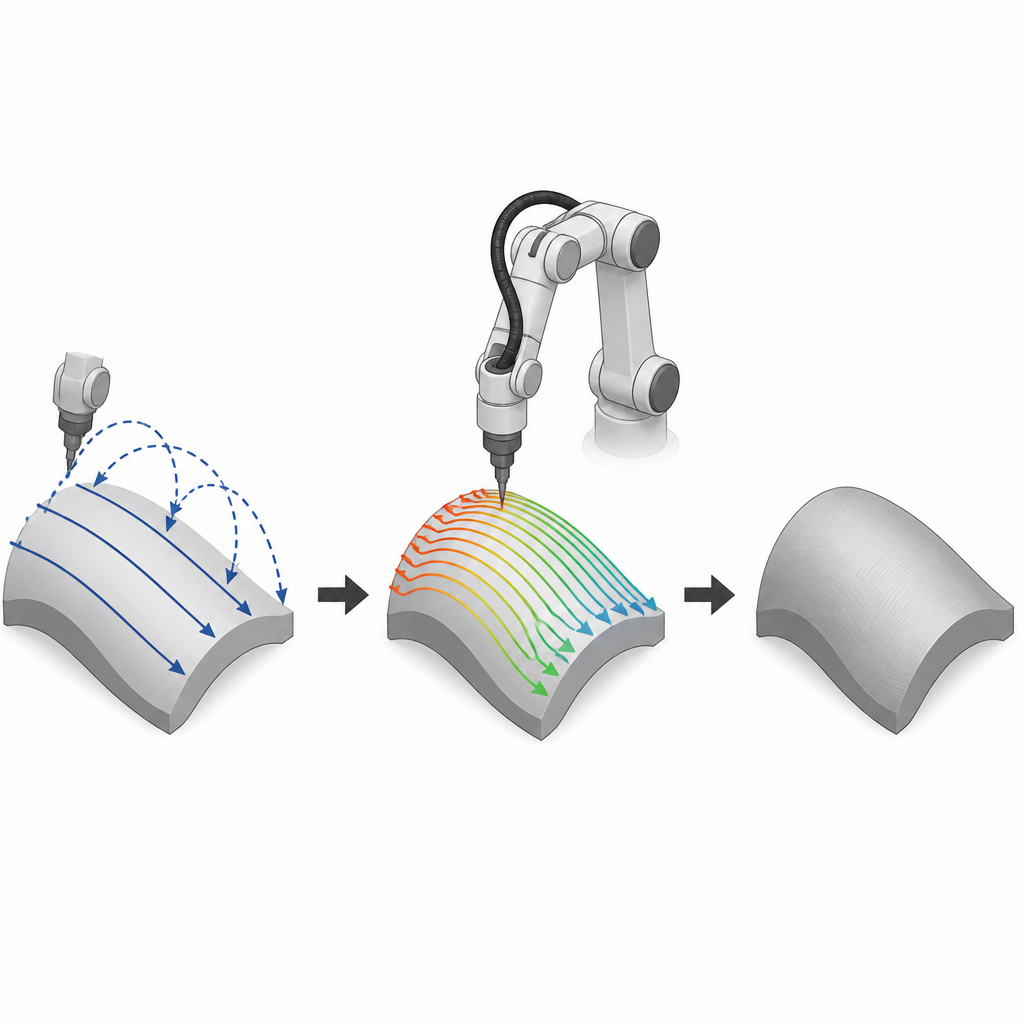
能够打印曲面形状的机器人
增材制造,通常称为3D打印,通常按平面层逐层构建物体。这对简单零件效果良好,但在处理平滑曲线和定制形状时存在困难。本研究介绍了一种低成本、开源的机器人式3D打印系统,能够同时多方向运动,从而比标准桌面打印机更快、更高质量地制造复杂曲面。

用于3D打印的灵活机器人
系统的核心是一台安装有熔融塑料喷嘴的六关节机器人臂。与只能左右、前后和上下移动的典型三轴打印机不同,这只机械臂可以像人的肩、肘、腕一样旋转和弯曲。研究人员详细定义了每个关节的连接和运动方式,随后使用数学工具计算臂尖在空间中的位置以及如何将其移动到目标点。这些计算使喷嘴能够沿着围绕零件的平滑倾斜路径运动,而不是仅仅堆叠平面层。
驱动机械臂背后的“大脑”
为协调这些运动,团队构建了一个分层控制系统,采用常见的工程软件和廉价硬件。面向用户的程序监控每个关节,在手动和自动模式之间切换,并显示关键运行数据。一台小型工业控制器实时执行指令,而后台计算环境负责求解复杂的运动路径和电机信号。来自传感器的反馈帮助实时调整运动。这些要素共同作用,使机器人在速度和方向变化时仍能稳定且准确地跟踪规划路径。
提升运动性能的设计选择
研究人员对机器人结构和传动系统都进行了优化。他们选择了带齿轮减速、皮带和蜗轮的步进电机,以在扭矩、速度和成本之间取得平衡,并通过计算机仿真测试这些选择在力、应力和振动方面的表现。通过对系统能量传递的建模,他们设计了能保持臂平稳运动的控制参数。细小的电机步距和合适的齿比使喷嘴产生极小的位移,帮助打印机将每条塑料线准确放置到微米级增量,这对精细表面至关重要。
更智能的路径以实现更快打印
除了硬件,研究还聚焦于机器人如何选择打印路径。团队开发了一种算法,将每一层分解为短线段,然后重新排序,使喷嘴总是移动到最近的下一个线段。这减少了在不挤出塑料时的无效空走路径。在波浪形表面的测试中显示,虽然总打印距离保持不变,但“空移”显著下降,旅行距离减少了超过一半,总路径长度约缩短三分之一。实际效果是更快的打印、更低的能耗以及运动部件的更少磨损。
将曲面打印付诸实践
为了检验系统性能,团队打印了简单的立方体以及更具挑战性的曲线波浪形塑料件。通过调整电机步进分辨率和层厚,他们显著降低了可见接缝和倾斜墙面上常见的台阶效应。该机器人臂实现的沉积速度高于传统三轴打印机,并能够在不使用额外支撑的情况下打印平滑的双曲面形状。对层厚和整体尺寸的测量表明,系统即使在复杂几何体上也能将误差控制在接近预期值的范围内。
这对未来制造意味着什么
总体而言,研究表明经过精心设计的开源机器人臂可以把传统3D打印转变为一种更灵活的工具,能够快速且精确地处理曲面形状。通过结合多方向运动、详细的数学模型、分层控制架构和更智能的路径规划,这一方法使制造具有平滑表面和更少支撑的定制零件变得更容易。这样的系统可以帮助把先进制造技术带入规模更小的实验室和作坊,支持从建筑到医疗器械的多种应用,而无需依赖昂贵的封闭式工业机器人。
引用: Zhang, Q., Wang, J., Zhao, Z. et al. Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure. Sci Rep 16, 15417 (2026). https://doi.org/10.1038/s41598-026-46136-2
关键词: 机器人3D打印, 增材制造, 多轴机器人, 曲面打印, 路径规划