Clear Sky Science · ja
付加製造された三次元曲面構造に対するオープンソースのロボット支援付加製造装置の評価
曲面を印刷できるロボット
付加製造、いわゆる3Dプリントは通常、平らな断面ごとに層を積み上げる手法で部品を作る。これは単純な部品には有効だが、滑らかな曲線や個別形状の表現には限界がある。本研究は、同時に多方向へ動ける低コストかつオープンソースのロボット式3Dプリントシステムを示し、標準的なデスクトッププリンタに比べて複雑な曲面をより速く、より高品質に作成できることを示す。

3D印刷に適した柔軟なロボット
システムの中核は、プラスチック押出しノズルを保持する6自由度のロボットアームである。左右・前後・上下のみを動かす典型的な三軸プリンタとは異なり、このアームは人間の肩肘手首のように回転・屈曲できる。研究者らは各関節の接続と動きを慎重に定義し、アーム先端が空間のどこに位置するか、目的点へどう動かすかを数学的に計算した。これらの計算により、ノズルは平坦な層を積み重ねる代わりに、部品の周りを滑らかに傾けた軌跡で辿ることが可能になる。
機械腕を支える頭脳
この動作を調整するために、チームは一般的な工学ソフトウェアと安価なハードウェアを使った階層化制御システムを構築した。ユーザー向けプログラムは各関節を監視し、手動と自動モードを切り替え、重要な動作データを表示する。小型の産業用コントローラがリアルタイムで命令を実行し、背景の計算環境が複雑な動作経路やモータ信号を算出する。センサからのフィードバックが動きをオンザフライで補正することで、速度や方向が変化しても計画された軌跡を正確にトレースしつつ安定性を保てるようになっている。
動作を改善する設計上の選択
研究者らはロボットの構造と駆動系の両方を最適化した。トルク、速度、コストのバランスを取るためにギア減速を備えたステッパーモータ、ベルト、ウォームギアを選び、これらの選択を力、応力、振動のコンピュータシミュレーションで検証した。システム内のエネルギー伝達をモデル化することで、アームが滑らかに動くための制御設定を設計した。細かなモータステップとギア比によりノズル先端での微小動作が可能となり、各プラスチックラインをミクロン単位で配置できるため、詳細な表面表現に重要である。
より賢い経路で高速化
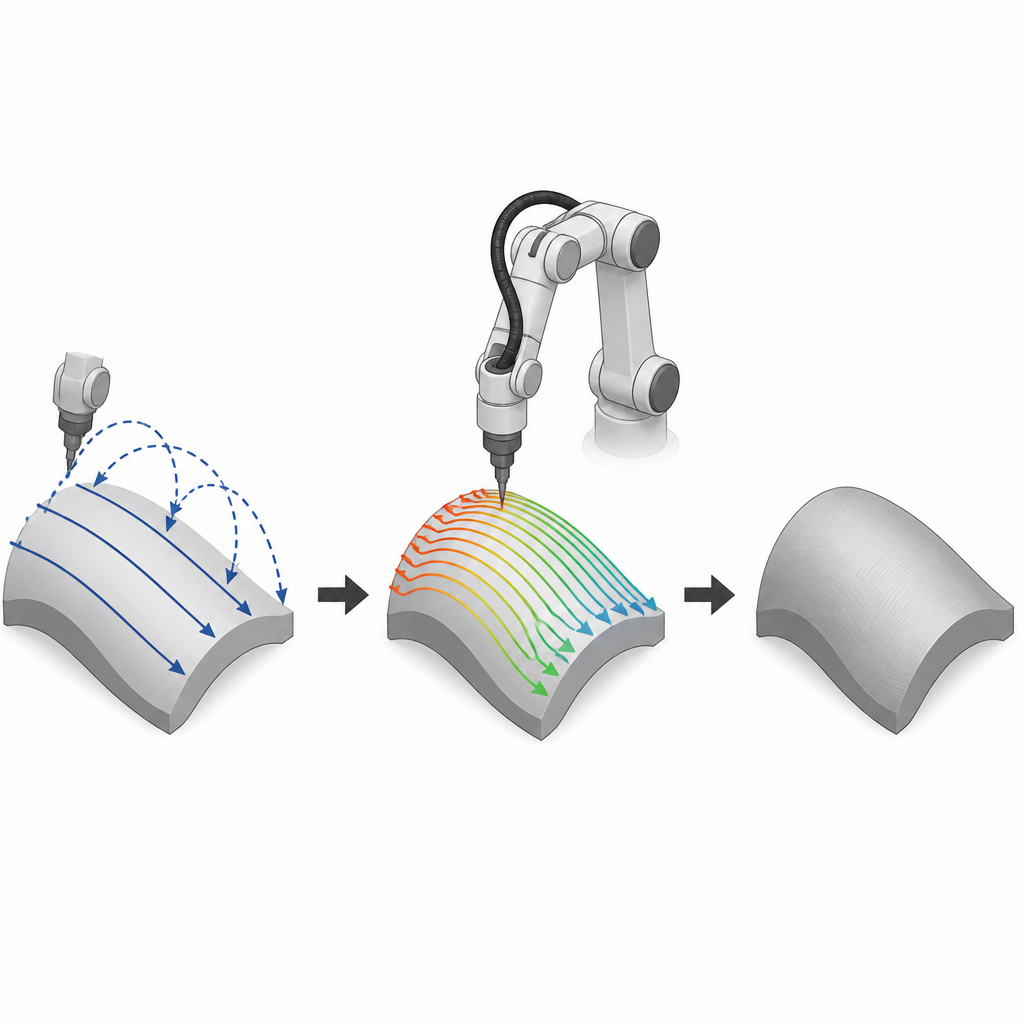
ハードウェアに加えて、本研究はロボットが印刷経路をどう選ぶかに焦点を当てる。チームは各層を短い線分に分割し、それらをノズルが常に近接した次の線分へ移動するように並べ替えるアルゴリズムを開発した。これにより材料を押出さない「空移動」が減る。波形の表面での試験では、総印刷距離は同じままである一方で空移動が大幅に減少し、移動長が半分以上短縮され、全体の経路長も約3分の1短くなった。実際にはこれが構築時間の短縮、エネルギー消費の低減、可動部の摩耗低減につながる。
曲面印刷の実践的検証
システムの性能を評価するために、チームは単純な立方体とより困難な曲面を持つ波状形状をプラスチックで印刷した。モータのステップ分解能や層厚を調整することで、傾斜面に通常現れる段差や継ぎ目の目立ちを大幅に低減できた。ロボットアームは従来の三軸プリンタより高い堆積速度を達成し、下支え材を必要とせず滑らかな二重曲面を印刷することができた。層厚や全体寸法の計測は、複雑な形状でも意図した値に近い誤差に収まることを示した。
今後のものづくりへの意義
総じて、この研究は慎重に設計されたオープンソースのロボットアームが、標準的な3Dプリントをより柔軟なツールに変え、曲面を速く正確に扱えるようにすることを示している。多方向動作、詳細な数学モデル、階層化された制御スキーム、そして賢い経路計画を組み合わせることで、サポート材の少ない滑らかな表面を持つカスタム部品の作成が容易になる。このようなシステムは高価なクローズドな産業用ロボットに頼らずとも、高度な製造技術を小規模な研究室や工房に導入し、建築から医療機器まで幅広い用途を支える可能性がある。
引用: Zhang, Q., Wang, J., Zhao, Z. et al. Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure. Sci Rep 16, 15417 (2026). https://doi.org/10.1038/s41598-026-46136-2
キーワード: ロボット3Dプリント, 付加製造, 多軸ロボット, 曲面印刷, 経路計画