Clear Sky Science · en
Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure
Robots That Can Print Curved Shapes
Additive manufacturing, often called 3D printing, usually builds objects layer by layer on flat slices. That works well for simple parts but struggles with smooth curves and custom shapes. This study presents a low-cost, open-source robot-based 3D printing system that can move in many directions at once, letting it create complex curved surfaces faster and with better quality than a standard desktop printer.

A Flexible Robot for 3D Printing
The heart of the system is a six-joint robotic arm that holds a plastic-extruding print nozzle. Unlike a typical three-axis printer that moves only left-right, front-back, and up-down, this arm can swivel and bend like a human shoulder, elbow, and wrist. The researchers carefully defined how each joint is connected and moves, then used mathematical tools to calculate where the arm’s tip will be in space and how to move it to a desired point. These calculations allow the nozzle to follow smooth, tilted paths around a part instead of stacking only flat layers.
Brains Behind the Mechanical Arm
To coordinate this motion, the team built a layered control system using common engineering software and inexpensive hardware. A user-facing program monitors each joint, switches between manual and automatic modes, and displays key operating data. A small industrial controller executes commands in real time, while a computing environment in the background works out complex motion paths and motor signals. Feedback from sensors helps adjust the movement on the fly. Together, these elements let the robot trace planned paths accurately while remaining stable, even when speeds and directions change.
Design Choices That Improve Motion
The researchers optimised both the robot’s structure and its drive system. They chose stepper motors with gear reductions, belts, and worm gears to balance torque, speed, and cost, and then tested these choices with computer simulations of forces, stresses, and vibrations. By modelling how energy moves through the system, they designed control settings that keep the arm moving smoothly. Fine motor steps and gear ratios give very small movements at the nozzle, helping the printer place each line of plastic within micron-scale increments, which is important for detailed surfaces.
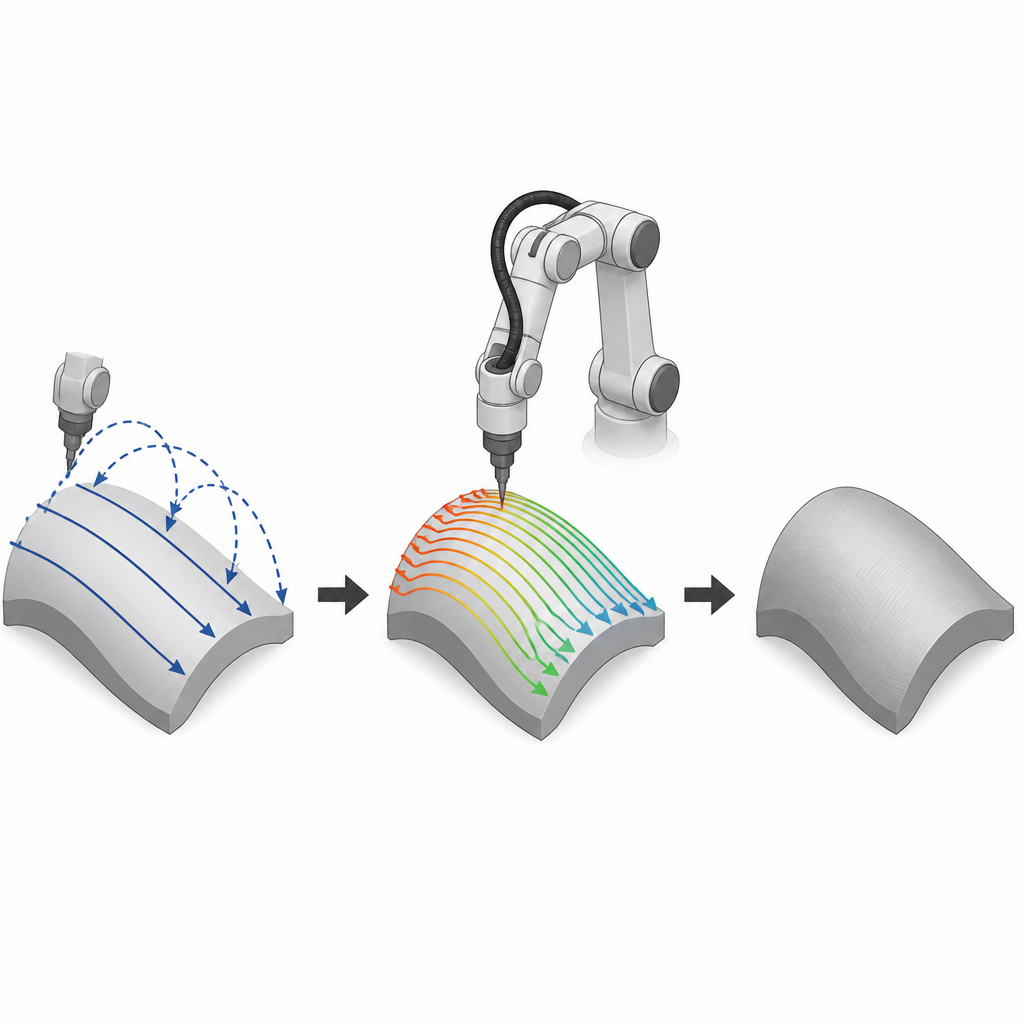
Smarter Paths for Faster Printing
Beyond the hardware, the study focuses on how the robot chooses its printing path. The team developed an algorithm that breaks each layer into short line segments, then reorders them so the nozzle always moves to the next nearby segment. This reduces wasted travel when no plastic is extruded. Tests on a wavy surface show that while the total printing distance stays the same, the “air moves” drop sharply, cutting travel length by more than half and shortening overall path length by about one third. In practice, that means faster builds, lower energy use, and less wear on moving parts.
Putting Curved Printing to the Test
To see how well the system performs, the team printed simple cubes and more challenging curved, wave-like shapes in plastic. By tuning motor step resolution and layer thickness, they significantly reduced visible seams and the stair-step effect that usually appears on sloped walls. The robotic arm achieved higher deposition speeds than a traditional three-axis printer and was able to print smooth, doubly curved forms without extra support material underneath. Measurements of layer thickness and overall size showed that the system can hold errors close to the intended values, even on complex geometries.
What This Means for Future Making
Overall, the work shows that a carefully designed, open-source robotic arm can turn standard 3D printing into a more flexible tool that handles curved shapes quickly and accurately. By combining multi-directional motion, detailed mathematical models, a layered control scheme, and smarter path planning, this approach makes it easier to create custom parts with smooth surfaces and fewer supports. Such systems could help bring advanced manufacturing into smaller labs and workshops, supporting applications from architecture to medical devices without relying on expensive closed industrial robots.
Citation: Zhang, Q., Wang, J., Zhao, Z. et al. Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure. Sci Rep 16, 15417 (2026). https://doi.org/10.1038/s41598-026-46136-2
Keywords: robotic 3D printing, additive manufacturing, multi axis robot, curved surface printing, path planning