Clear Sky Science · tr
Açık kaynaklı robot destekli eklemeli üretim ekipmanının eklemeli olarak üretilmiş üç boyutlu kavisli yapı için değerlendirilmesi
Kavisli Şekiller Yazdırabilen Robotlar
Genellikle 3B baskı olarak anılan eklemeli üretim, nesneleri katman katman düz dilimler halinde oluşturur. Bu yöntem basit parçalar için iyi çalışır ancak pürüzsüz eğrilikler ve özel şekiller söz konusu olduğunda zorluk çıkarır. Bu çalışma, aynı anda birçok yönde hareket edebilen, böylece karmaşık kavisli yüzeyleri standart bir masaüstü yazıcıya kıyasla daha hızlı ve daha iyi kalitede oluşturmayı sağlayan düşük maliyetli, açık kaynaklı robot tabanlı bir 3B baskı sistemi sunuyor.

3B Baskı İçin Esnek Bir Robot
Sistemin kalbinde, plastik ekstruzyonlu bir baskı memesi tutan altı eklemli bir robot kol bulunur. Sadece sağ-sol, ön-arka ve yukarı-aşağı hareket eden tipik üç eksenli bir yazıcının aksine, bu kol insan omuzu, dirseği ve bileği gibi dönebilir ve bükülebilir. Araştırmacılar her bir eklemin nasıl bağlandığını ve hareket ettiğini dikkatle tanımladı, ardından kolun ucunun uzayda nerede olacağını ve istenen noktaya nasıl hareket ettirileceğini hesaplamak için matematiksel araçlar kullandı. Bu hesaplamalar, memenin yalnızca düz katmanlar yığmak yerine bir parçanın etrafında eğimli ve pürüzsüz yollar izlemesini sağlar.
Mekanik Kolun Arkasındaki Zeka
Bu hareketi koordine etmek için ekip, yaygın mühendislik yazılımları ve düşük maliyetli donanımlar kullanarak katmanlı bir kontrol sistemi kurdu. Kullanıcıya dönük bir program her eklemi izler, manuel ve otomatik modlar arasında geçiş yapar ve ana işletim verilerini gösterir. Küçük bir endüstriyel kontrolör komutları gerçek zamanlı olarak yürütürken, arka plandaki bir hesaplama ortamı karmaşık hareket yolları ve motor sinyallerini hesaplar. Sensörlerden gelen geri bildirimler hareketi anlık olarak ayarlamaya yardımcı olur. Bu öğelerin birleşimi, hızlar ve yönler değişse bile robotun planlanmış yolları doğru ve kararlı şekilde izlemesini sağlar.
Hareketi İyileştiren Tasarım Seçimleri
Araştırmacılar hem robotun yapısını hem de sürüş sistemini optimize ettiler. Tork, hız ve maliyeti dengelemek için dişli indirimli step motorlar, kayışlar ve kurma dişlileri seçtiler ve ardından bu seçenekleri kuvvetlerin, gerilmelerin ve titreşimlerin bilgisayar simülasyonlarıyla test ettiler. Sistemde enerjinin nasıl aktığını modelleyerek, kolun düzgün hareket etmesini sağlayan kontrol ayarlarını tasarladılar. İnce motor adımları ve dişli oranları, memede çok küçük hareketler verilmesini sağlar; bu da yazıcının plastik çizgilerini mikron ölçeğinde yerleştirmesine yardımcı olur ve detaylı yüzeyler için önemlidir.
Daha Akıllı Yollar, Daha Hızlı Baskı
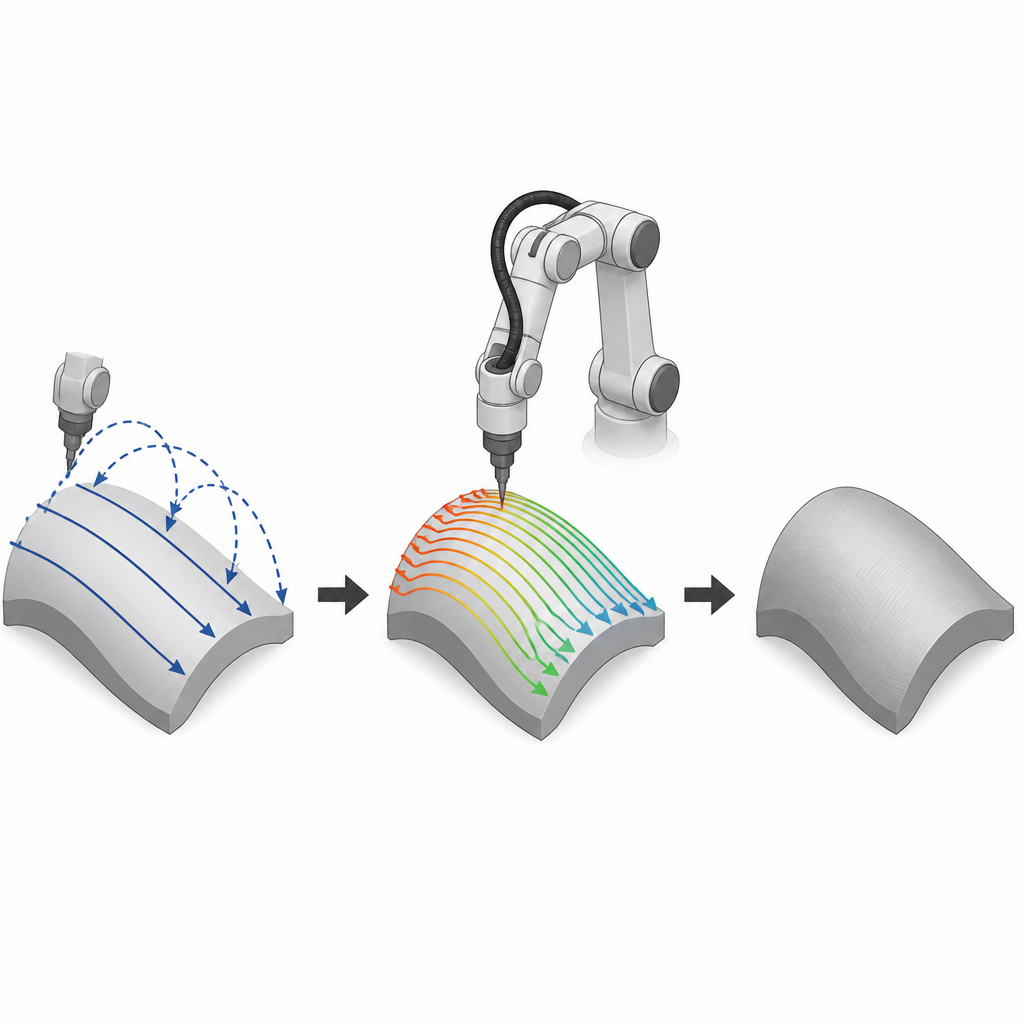
Donanımın ötesinde, çalışma robotun baskı yolunu nasıl seçtiğine odaklanıyor. Ekip, her katmanı kısa doğru parçalara bölen, ardından memenin her zaman bir sonraki yakındaki parçaya gitmesini sağlayacak şekilde bunları yeniden sıralayan bir algoritma geliştirdi. Bu, plastik ekstrüde edilmeyen boş hareketleri azaltır. Dalgalı bir yüzey üzerindeki testler gösteriyor ki toplam yazdırma mesafesi aynı kalırken “hava hareketleri” keskin biçimde düşüyor; seyahat uzunluğu yarıdan fazla azalıyor ve toplam yol uzunluğu yaklaşık üçte bir kısalıyor. Pratikte bu, daha hızlı üretimler, daha düşük enerji kullanımı ve hareketli parçaların daha az aşınması demek.
Kavisli Baskıyı Test Etmek
Sistemin performansını görmek için ekip, plastikten basit küpler ve daha zorlu kavisli, dalga benzeri şekiller yazdırdı. Motor adım çözünürlüğü ve katman kalınlığını ayarlayarak, genellikle eğimli duvarlarda görülen görünür dikişleri ve merdiven basamağı etkisini önemli ölçüde azalttılar. Robot kol, geleneksel üç eksenli bir yazıcıdan daha yüksek biriktirme hızlarına ulaştı ve destek materyali olmadan pürüzsüz, çift kavisli formlar yazdırabildi. Katman kalınlığı ve genel boyut ölçümleri, sistemin karmaşık geometrilerde bile hedeflenen değerlere yakın hata seviyelerini koruyabildiğini gösterdi.
Gelecekte Üretim İçin Anlamı
Genel olarak bu çalışma, özenle tasarlanmış açık kaynaklı bir robot kolun standart 3B baskıyı kavisli şekilleri hızlı ve doğru biçimde işleyebilen daha esnek bir araca dönüştürebileceğini gösteriyor. Çok yönlü hareket, ayrıntılı matematiksel modeller, katmanlı bir kontrol şeması ve daha akıllı yol planlamayı birleştirerek, bu yaklaşım pürüzsüz yüzeylere ve daha az destek gereksinimine sahip özel parçalar oluşturmayı kolaylaştırıyor. Böyle sistemler, pahalı kapalı endüstriyel robotlara güvenmeden mimariden tıbbi cihazlara kadar uygulamaları destekleyerek gelişmiş üretimi daha küçük laboratuvarlara ve atölyelere taşıyabilir.
Atıf: Zhang, Q., Wang, J., Zhao, Z. et al. Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure. Sci Rep 16, 15417 (2026). https://doi.org/10.1038/s41598-026-46136-2
Anahtar kelimeler: robotik 3B baskı, eklemeli üretim, çok eksenli robot, kavisli yüzey baskısı, yol planlaması