Clear Sky Science · pt
Avaliação de equipamento de fabricação aditiva assistida por robô de código aberto para estrutura curva tridimensional fabricada por adição
Robôs que Podem Imprimir Formas Curvas
A fabricação aditiva, frequentemente chamada de impressão 3D, normalmente constrói objetos camada por camada em fatias planas. Isso funciona bem para peças simples, mas encontra dificuldades com curvas suaves e formas personalizadas. Este estudo apresenta um sistema de impressão 3D baseado em robô de baixo custo e código aberto que pode mover-se em várias direções simultaneamente, permitindo criar superfícies curvas complexas mais rapidamente e com melhor qualidade do que uma impressora de mesa padrão.

Um Robô Flexível para Impressão 3D
O núcleo do sistema é um braço robótico de seis articulações que sustenta um bico extrusor de plástico. Ao contrário de uma impressora típica de três eixos que se move apenas para a esquerda-direita, frente-trás e cima-baixo, este braço pode girar e dobrar como um ombro, cotovelo e pulso humanos. Os pesquisadores definiram cuidadosamente como cada junta é conectada e se movimenta, então usaram ferramentas matemáticas para calcular onde a ponta do braço estará no espaço e como movê-la até um ponto desejado. Esses cálculos permitem que o bico siga trajetórias suaves e inclinadas em torno de uma peça em vez de empilhar apenas camadas planas.
Cérebro por Trás do Braço Mecânico
Para coordenar esse movimento, a equipe construiu um sistema de controle em camadas usando software de engenharia comum e hardware de baixo custo. Um programa voltado ao usuário monitora cada junta, alterna entre modos manual e automático e exibe dados operacionais chave. Um pequeno controlador industrial executa comandos em tempo real, enquanto um ambiente de computação em segundo plano calcula trajetórias de movimento complexas e sinais para os motores. Feedback de sensores ajuda a ajustar o movimento em tempo real. Juntos, esses elementos permitem que o robô trace trajetórias planejadas com precisão enquanto permanece estável, mesmo quando velocidades e direções mudam.
Escolhas de Projeto que Melhoram o Movimento
Os pesquisadores otimizaram tanto a estrutura do robô quanto seu sistema de acionamento. Eles escolheram motores de passo com reduções por engrenagens, correias e fusos sem-fim para equilibrar torque, velocidade e custo, e então testaram essas escolhas com simulações por computador de forças, tensões e vibrações. Ao modelar como a energia se propaga pelo sistema, projetaram configurações de controle que mantêm o braço em movimento de forma suave. Passos finos do motor e relações de engrenagem proporcionam movimentos muito pequenos no bico, ajudando a impressora a depositar cada linha de plástico em incrementos na escala de microns, o que é importante para superfícies detalhadas.
Trajetórias Mais Inteligentes para Impressão Mais Rápida
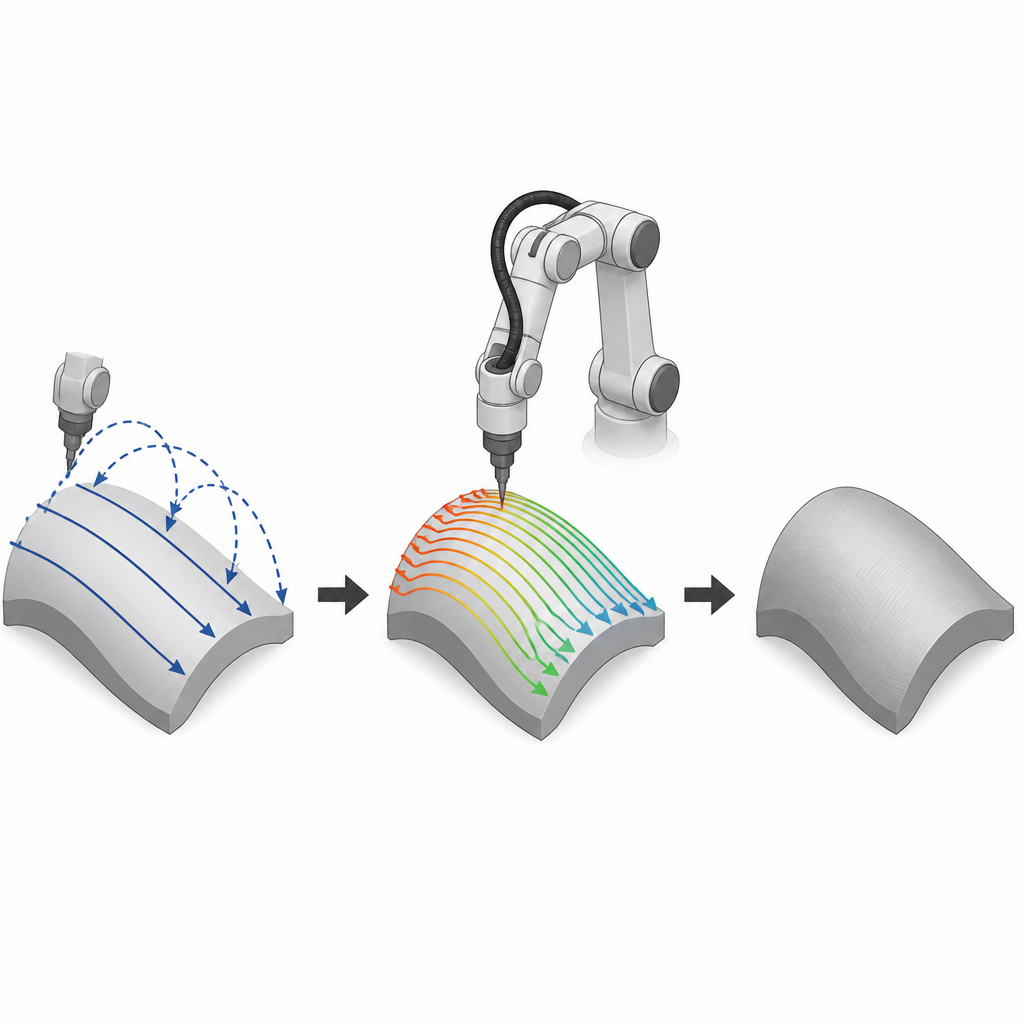
Além do hardware, o estudo foca em como o robô escolhe sua trajetória de impressão. A equipe desenvolveu um algoritmo que divide cada camada em pequenos segmentos de linha, e então os reordena para que o bico sempre se mova para o próximo segmento próximo. Isso reduz deslocamentos desperdiçados quando nenhum plástico é extrudado. Testes em uma superfície ondulada mostram que, embora a distância total de impressão permaneça a mesma, os “movimentos aéreos” caem acentuadamente, reduzindo o comprimento de deslocamento em mais da metade e encurtando o comprimento total do caminho em cerca de um terço. Na prática, isso significa construções mais rápidas, menor consumo de energia e menor desgaste das partes móveis.
Testando a Impressão Curva
Para avaliar o desempenho do sistema, a equipe imprimiu cubos simples e formas onduladas e curvas mais desafiadoras em plástico. Ajustando a resolução de passos dos motores e a espessura de camada, reduziram significativamente as emendas visíveis e o efeito de degrau que normalmente aparece em paredes inclinadas. O braço robótico alcançou velocidades de deposição superiores às de uma impressora tradicional de três eixos e foi capaz de imprimir formas suavemente curvadas em duas direções sem material de suporte adicional por baixo. Medições de espessura de camada e dimensões gerais mostraram que o sistema consegue manter erros próximos aos valores pretendidos, mesmo em geometria complexa.
O Que Isso Significa para a Manufatura do Futuro
No geral, o trabalho demonstra que um braço robótico bem projetado e de código aberto pode transformar a impressão 3D padrão em uma ferramenta mais flexível que trata formas curvas de modo rápido e preciso. Ao combinar movimento multidirecional, modelos matemáticos detalhados, um esquema de controle em camadas e planejamento de trajetória mais inteligente, essa abordagem facilita a criação de peças customizadas com superfícies lisas e menos suportes. Tais sistemas podem ajudar a levar manufatura avançada a laboratórios e oficinas menores, apoiando aplicações que vão da arquitetura a dispositivos médicos sem depender de robôs industriais fechados e caros.
Citação: Zhang, Q., Wang, J., Zhao, Z. et al. Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure. Sci Rep 16, 15417 (2026). https://doi.org/10.1038/s41598-026-46136-2
Palavras-chave: impressão 3D robótica, fabricação aditiva, robô multi-eixo, impressão de superfície curva, planejamento de trajetória