Clear Sky Science · he
הערכת ציוד קוד-פתוח לרחפנים רובוטיים לתוצרים תלת־ממד מעוצבים בעזרת ייצור תוספי
רובוטים שיכולים להדפיס צורות מעוקלות
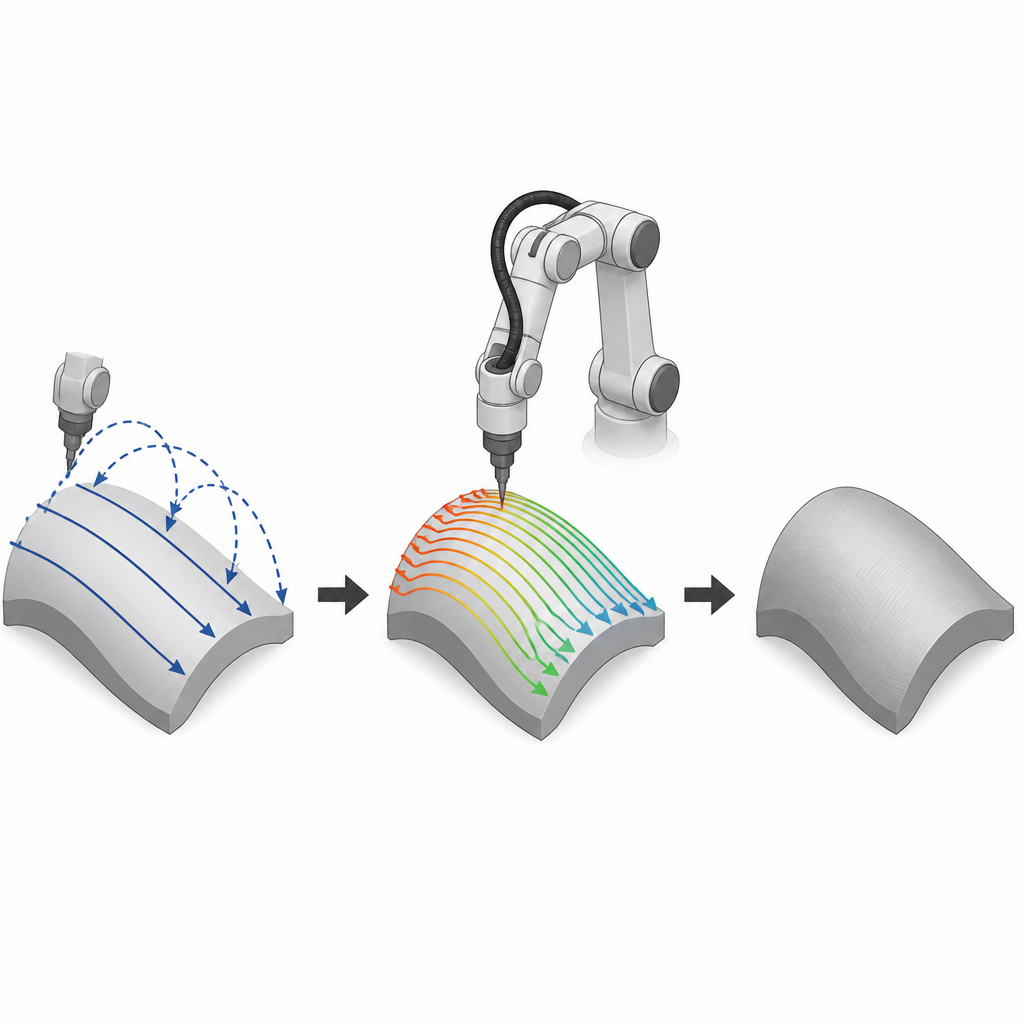
ייצור תוספי, הידוע גם כהדפסת תלת־ממד, בדרך כלל בונה עצמים שכבה אחר שכבה על פרוסות שטוחות. זה עובד טוב לחלקים פשוטים אך מתקשה עם קימורים חלקים וצורות מותאמות. המחקר הזה מציג מערכת הדפסה תלת־ממדית מבוססת רובוט בקוד־פתוח וזולה שיכולה לנוע בכיוונים רבים בבת אחת, מה שמאפשר לה ליצור משטחים מעוקלים מורכבים מהר יותר ובאיכות טובה יותר מאשר מדפסת שולחנית סטנדרטית.

רובוט גמיש להדפסה תלת־ממדית
הלב של המערכת הוא זרוע רובוטית בעלת שישה מפרקים שמחזיקה מוליך הזרקת פלסטיק. בניגוד למדפסת תלת־ציר טיפוסית שנעה רק שמאלה־ימינה, קדימה־אחורה ולמעלה־למטה, הזרוע הזאת יכולה להסתובב ולהתקפל כמו כתף, מרפק ומפרק כף יד אנושיים. החוקרים הגדירו בקפידה כיצד כל מפרק מחובר ונע, ואז השתמשו בכלים מתמטיים כדי לחשב היכן תהיה קצה הזרוע במרחב וכיצד להזיזו לנקודה הרצויה. חישובים אלה מאפשרים למזלף לעקוב אחרי מסלולים חלקים ומותחים סביב חלק במקום להסתמך רק על שכבות שטוחות.
המוח מאחורי הזרוע המכנית
כדי לתאם את התנועה הזו, הצוות בנה מערכת בקרה רב־שכבתית המשתמשת בתוכנה מהנדסית נפוצה ובחומרה זולה. תוכנה מול המשתמש מנטרת כל מפרק, מחליפה בין מצבי ידני ואוטומטי ומציגה נתוני תפעול מרכזיים. בקרה תעשייתית קטנה מבצעת פקודות בזמן אמת, בעוד שסביבת חישוב ברקע מפיקה מסלולי תנועה מורכבים ואותות למנועים. משוב מחיישנים מסייע לכוונן את התנועה תוך כדי פעולה. יחד, האלמנטים הללו מאפשרים לזרוע לעקוב בדיוק אחרי מסלולים מתוכננים תוך שמירה על יציבות, אפילו כשמהירויות וכיוונים משתנים.
בחירות עיצוב שמשפרות את התנועה
החוקרים אופטימיזו הן את מבנה הרובוט והן את מערכת ההנעה שלו. הם בחרו במנועי צעד עם הנחתה של הילוכים, חגורות וגלגלי תולעת כדי לאזן בין מומנט, מהירות ועלות, ולאחר מכן בדקו את הבחירות הללו באמצעות סימולציות מחשב של כוחות, מאמצים ורעידות. על־ידי דגום כיצד אנרגיה עוברת דרך המערכת, הם תכננו הגדרות בקרה ששומרות על התנועה חלקה. צעדי מנוע עדינים ויחסי הילוכים מאפשרים תנועות זעירות בקצה המזלף, מה שמסייע למערכת למקם כל פס פלסטיק בתוך מרווחים בקנה מידה מיקרוני — חשובה לפרטים מדויקים.
מסלולים חכמים להדפסה מהירה יותר
מעבר לחומרה, המחקר מתמקד באופן שבו הרובוט בוחר את מסלול ההדפסה שלו. הצוות פיתח אלגוריתם שמחלק כל שכבה למקטעים קצרים, ואז מסדר אותם כך שהמזלף תמיד ינוע למקטע הקרוב הבא. זה מקטין נסיעות מיותרות כאשר לא ניתז פלסטיק. ניסויים על משטח גלית מראים שעל אף שמרחק ההדפסה הכולל נשאר זהה, "תנועות האוויר" יורדות בחדות, קוטעות את מרחק הנסיעה ביותר ממחצית ומקצרות את אורכו הכולל של המסלול בכ־שליש. בפועל זה מתרגם לבנייה מהירה יותר, צריכת אנרגיה נמוכה יותר ופחות שחיקה על חלקים נעים.
בדיקת ההדפסה המעוקלת
כדי להעריך את ביצועי המערכת, הצוות הדפיס קוביות פשוטות וצורות גליות מעוקלות יותר מפלסטיק. על ידי כוונון רזולוציית צעד המנוע ועובי השכבה, הם הקטינו משמעותית תפרים נראים ואפקט המדרגות שמופיע בדרך כלל בקירות בעלי שיפוע. זרוע הרובוט השיגה מהירויות בדיקת חומר גבוהות יותר מאשר מדפסת תלת־ציר מסורתית והצליחה להדפיס צורות דו־עוקלות וחלקות ללא חומר תמיכה נוסף מתחתיהן. מדידות עובי השכבות והגודל הכללי הראו שהמערכת יכולה לשמור על שגיאות קרובות לערכי המטרה, גם בגיאומטריות מורכבות.
מה משמעות הדבר לעשייה בעתיד
בסך הכול, העבודה מראה שזרוע רובוטית מעוצבת בקפידה ובקוד־פתוח יכולה להפוך הדפסה תלת־ממדית סטנדרטית לכלי גמיש יותר, שמטפל בצורות מעוקלות במהירות ובדיוק. בשילוב תנועה רב־כיוונית, מודלים מתמטיים מפורטים, סכמת בקרה רב־שכבתית ותכנון מסלולים חכם, הגישה הזו מקלה על יצירת חלקים מותאמים עם משטחים חלקים ופחות תומכים. מערכות כאלה יכולות לסייע להכניס ייצור מתקדם למעבדות וסדנאות קטנות יותר, לתמוך ביישומים מאדריכלות ועד מכשירים רפואיים מבלי להסתמך על רובוטים תעשייתיים סגורים ויקרים.
ציטוט: Zhang, Q., Wang, J., Zhao, Z. et al. Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure. Sci Rep 16, 15417 (2026). https://doi.org/10.1038/s41598-026-46136-2
מילות מפתח: הדפסה רובוטית תלת־ממדית, ייצור תוספי, רובוט רב־צירי, הדפסה על פני שטח מעוקל, תכנון מסלולים