Clear Sky Science · ar
تقييم معدات التصنيع الإضافي بمساعدة الروبوت مفتوحة المصدر لهياكل ثلاثية الأبعاد المنحنية المصنّعة إضافياً
روبوتات قادرة على طباعة الأشكال المنحنية
عادةً ما يبني التصنيع الإضافي، المعروف بالطباعة ثلاثية الأبعاد، الأجسام طبقة تلو الأخرى على شرائح مسطحة. هذا الأسلوب مناسب للأجزاء البسيطة لكنه يصطدم بصعوبة عند التعامل مع المنحنيات الناعمة والأشكال المخصصة. تعرض هذه الدراسة نظام طباعة ثلاثية الأبعاد روبوتي منخفض التكلفة ومفتوح المصدر يمكنه الحركة في اتجاهات متعددة في آن واحد، مما يسمح له بإنشاء أسطح منحنية معقدة بسرعة وجودة أفضل من طابعة مكتب تقليدية.

روبوت مرن للطباعة ثلاثية الأبعاد
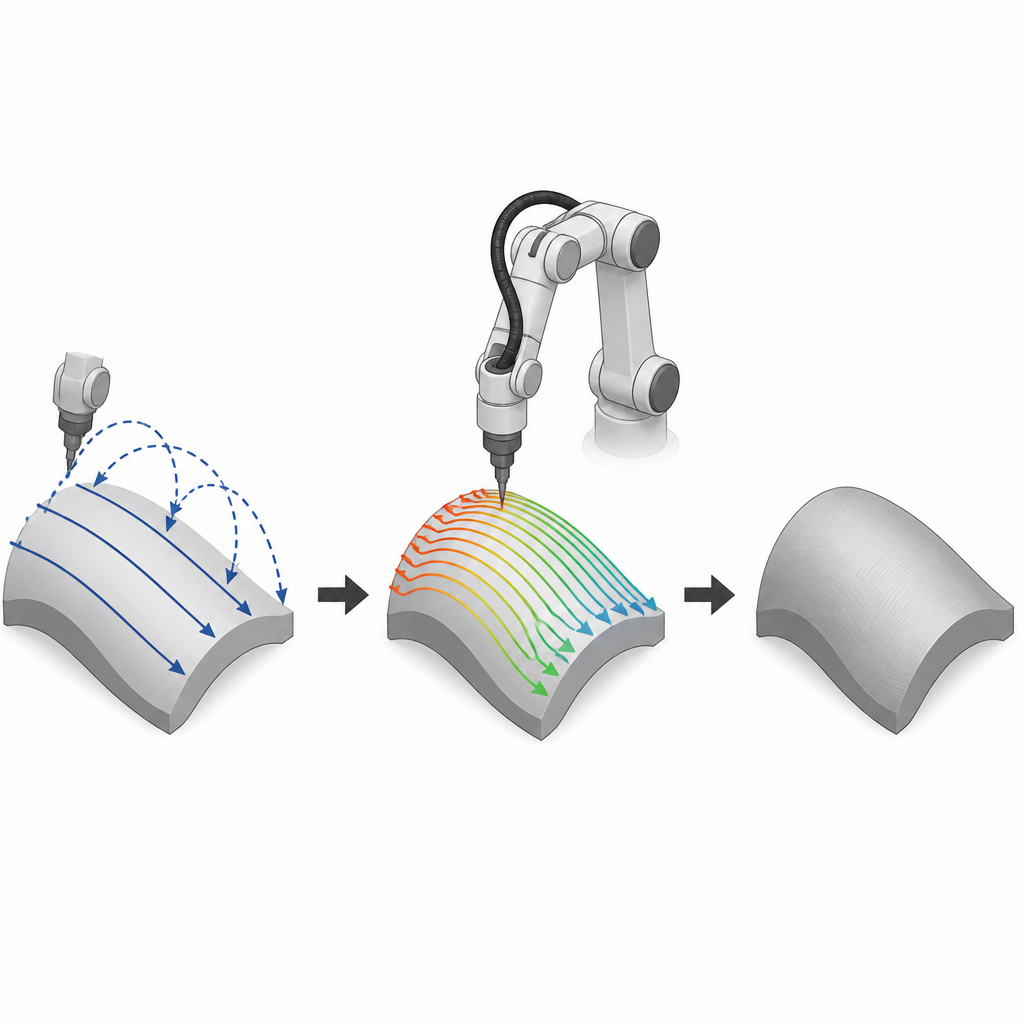
قلب النظام هو ذراع روبوتية بست مفاصل تحمل فوهة طباعة تخرج البلاستيك. على خلاف طابعة ثلاثية المحاور التقليدية التي تتحرك فقط يسار-يمين، أمام-خلف، وأعلى-أسفل، تستطيع هذه الذراع الالتفاف والانحناء مثل الكتف والمرفق والمعصم البشريين. حدد الباحثون بعناية كيفية توصيل كل مفصل وحركته، ثم استخدموا أدوات رياضية لحساب موضع طرف الذراع في الفراغ وكيفية تحريكه إلى نقطة مرغوبة. تُمكّن هذه الحسابات الفوهة من تتبع مسارات مائلة وناعمة حول الجزء بدلاً من تكديس طبقات مسطحة فقط.
الذكاء خلف الذراع الميكانيكية
لتنسيق هذه الحركة، بنى الفريق نظام تحكم متعدد الطبقات باستخدام برمجيات هندسية شائعة ومكونات مادية منخفضة التكلفة. يراقب برنامج واجهة المستخدم كل مفصل، ويبدّل بين أوضاع يدوية وآلية، ويعرض بيانات تشغيل رئيسية. منفذ تحكم صناعي صغير ينفذ الأوامر في الزمن الحقيقي، بينما بيئة حسابية في الخلفية تحسب مسارات الحركة المعقدة وإشارات المحركات. تساعد التغذية الراجعة من المستشعرات على تعديل الحركة أثناء التشغيل. معًا تُمكّن هذه العناصر الروبوت من تتبع المسارات المخططة بدقة مع الحفاظ على الاستقرار، حتى عند تغيّر السرعات والاتجاهات.
خيارات التصميم التي تحسّن الحركة
حسّن الباحثون كلاً من هيكل الروبوت ونظام القيادة الخاص به. اختاروا محركات خطوة مع تخفيضات تروس، وأحزمة، وتروس دودية لموازنة العزم والسرعة والتكلفة، ثم اختبروا هذه الخيارات بمحاكاة حاسوبية للقوى والإجهادات والاهتزازات. من خلال نمذجة كيفية انتقال الطاقة عبر النظام، صمموا إعدادات تحكم تحافظ على حركة الذراع بسلاسة. تمنح خطوات المحرك الدقيقة ونسب التروس حركات صغيرة جدًا عند الفوهة، مما يساعد الطابعة على وضع كل خط من البلاستيك بدقة على مقاييس ميكرونية، وهو أمر مهم للأسطح المفصلة.
مسارات أذكى للطباعة الأسرع
بعيدًا عن الأجهزة، تركز الدراسة على كيفية اختيار الروبوت لمسار الطباعة. طور الفريق خوارزمية تقسم كل طبقة إلى قطع خطية قصيرة، ثم تعيد ترتيبها بحيث تنتقل الفوهة دائمًا إلى القطعة القريبة التالية. يقلل هذا من السفر الضائع عندما لا يتم طرد البلاستيك. تُظهر الاختبارات على سطح متموج أنه بينما تبقى مسافة الطباعة الإجمالية نفسها، تنخفض "حركات الهواء" بشكل حاد، مما يخفض طول السفر بأكثر من النصف ويقلص طول المسار الإجمالي بحوالي الثلث. عمليًا، يعني ذلك بناءات أسرع، واستهلاك طاقة أقل، وتآكل أقل للأجزاء المتحركة.
اختبار الطباعة المنحنية
لاختبار أداء النظام، طبع الفريق مكعبات بسيطة وأشكالًا أكثر تحديًا منحنية ومتموجة من البلاستيك. من خلال ضبط دقة خطوة المحرك وسمك الطبقة، خفّضوا بشكل كبير اللحامات المرئية وتأثير الدرج الذي يظهر عادة على الجدران المائلة. حققت الذراع الروبوتية سرعات ترسيب أعلى من طابعة ثلاثية المحاور تقليدية وكانت قادرة على طباعة أشكال منحنية مزدوجة الاستدارة دون مواد دعم إضافية تحتها. أظهرت قياسات سمك الطبقات والأبعاد الكلية أن النظام يمكنه الحفاظ على أخطاء قريبة من القيم المقصودة، حتى على هندسيات معقدة.
ما تعنيه هذه النتيجة لصُنع المستقبل
بشكل عام، تُظهر هذه العمل أن ذراع روبوتية مفتوحة المصدر مصممة بعناية يمكن أن تحوّل الطباعة ثلاثية الأبعاد القياسية إلى أداة أكثر مرونة تتعامل مع الأشكال المنحنية بسرعة ودقة. من خلال الجمع بين الحركة متعددة الاتجاهات، ونماذج رياضية مفصلة، ومخطط تحكم متعدد الطبقات، وتخطيط مسارات أذكى، يجعل هذا النهج من الأسهل إنشاء أجزاء مخصصة بأسطح ناعمة ودعائم أقل. قد تساعد مثل هذه الأنظمة على إدخال التصنيع المتقدم إلى مختبرات وورش أصغر، داعمة تطبيقات من العمارة إلى الأجهزة الطبية دون الاعتماد على روبوتات صناعية مغلقة ومكلفة.
الاستشهاد: Zhang, Q., Wang, J., Zhao, Z. et al. Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure. Sci Rep 16, 15417 (2026). https://doi.org/10.1038/s41598-026-46136-2
الكلمات المفتاحية: الطباعة الروبوتية ثلاثية الأبعاد, التصنيع الإضافي, روبوت متعدد المحاور, طباعة الأسطح المنحنية, تخطيط المسارات