Clear Sky Science · ru
Оценка открытого оборудования роботизированной аддитивной печати для аддитивного изготовления трехмерной изогнутой конструкции
Роботы, которые могут печатать изогнутые формы
Аддитивное производство, часто называемое 3D-печатью, обычно строит объекты слой за слоем на плоских сечениях. Это хорошо работает для простых деталей, но испытывает трудности с плавными кривыми и индивидуализированными формами. В этом исследовании представлена недорогая открытая система роботизированной 3D-печати, способная двигаться во многих направлениях одновременно, что позволяет создавать сложные изогнутые поверхности быстрее и с лучшим качеством, чем стандартный настольный принтер.

Гибкий робот для 3D-печати
Ядро системы — шестосуточный роботизированный манипулятор, держащий сопло для экструзии пластика. В отличие от типичного трёхосевого принтера, который движется только влево–вправо, вперёд–назад и вверх–вниз, этот манипулятор может поворачиваться и сгибаться подобно человеческому плечу, локтю и запястью. Исследователи тщательно определили связи и движения каждой суставной оси, а затем использовали математические инструменты для расчёта положения наконечника манипулятора в пространстве и способов перемещения его к требуемой точке. Эти расчёты позволяют соплу следовать плавным, наклонным траекториям вокруг детали вместо накапливания только плоских слоёв.
«Мозг» за механической рукой
Для координации этого движения команда создала многоуровневую систему управления с использованием распространённого инженерного ПО и недорогого оборудования. Пользовательская программа отслеживает каждую ось, переключает режимы между ручным и автоматическим и отображает ключевые эксплуатационные данные. Небольшой промышленный контроллер выполняет команды в реальном времени, в то время как вычислительная среда на заднем плане рассчитывает сложные траектории движения и сигналы для двигателей. Обратная связь от датчиков помогает корректировать движение по ходу исполнения. В совокупности эти элементы позволяют роботу точно повторять запланированные траектории, оставаясь стабильным даже при изменениях скорости и направления.
Решения в конструкции, улучшающие движение
Исследователи оптимизировали как структуру робота, так и его приводную систему. Они выбрали шаговые моторы с редукторами, ремнями и червячными передачами, чтобы сбалансировать крутящий момент, скорость и стоимость, и затем протестировали эти варианты с помощью компьютерного моделирования сил, напряжений и вибраций. Моделируя, как энергия распространяется по системе, они разработали настройки управления, которые поддерживают плавность движения манипулятора. Мелкие шаги двигателей и соотношения передач дают очень маленькие перемещения на сопле, что помогает принтеру размещать каждую линию пластика с микронной точностью — важно для детализированных поверхностей.
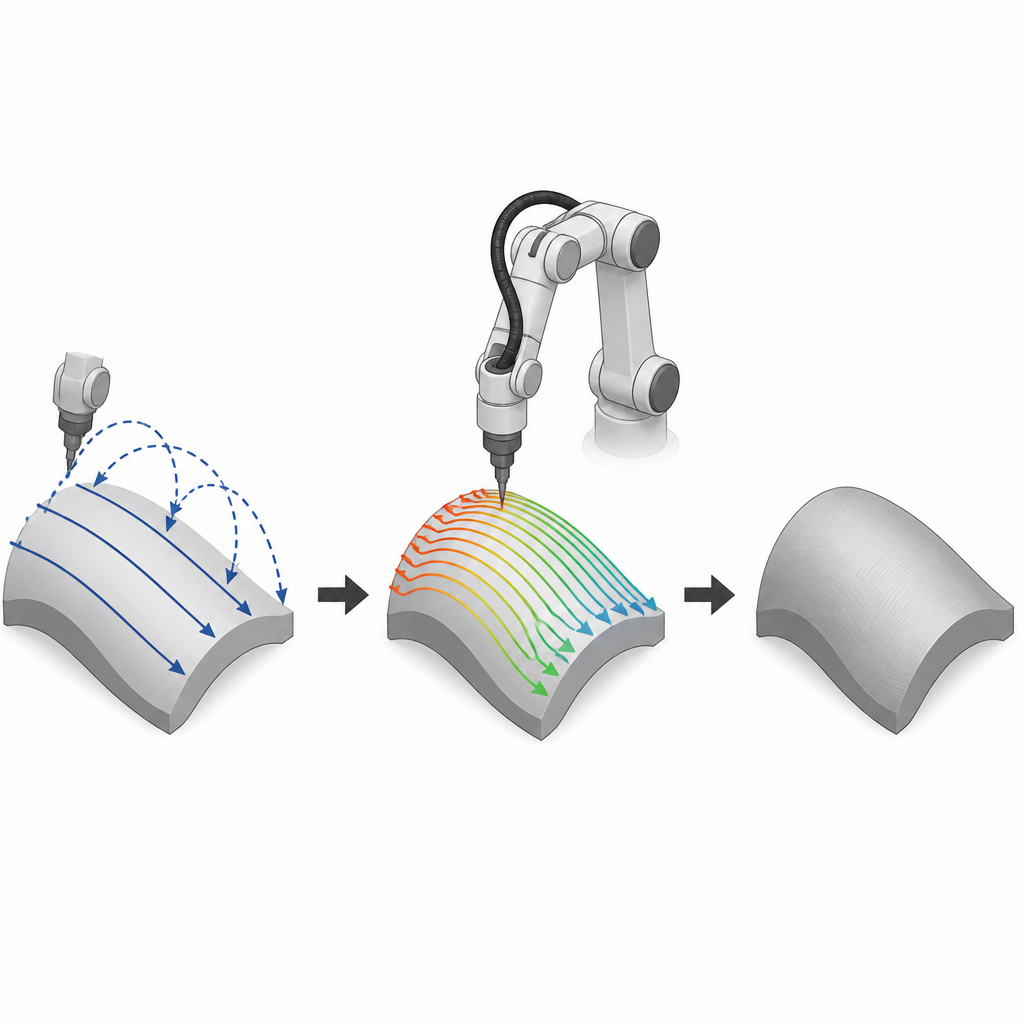
Умные траектории для более быстрой печати
Помимо аппаратной части, исследование сосредоточено на том, как робот выбирает траекторию печати. Команда разработала алгоритм, который разбивает каждый слой на короткие отрезки линий, а затем переупорядочивает их так, чтобы сопло всегда переходило к ближайшему следующему сегменту. Это сокращает бесполезные перемещения, когда пластик не экструзируется. Испытания на волнообразной поверхности показали, что при сохранении общей печатной дистанции «холостые» ходы резко сокращаются — длина таких перемещений уменьшается более чем вдвое, а общая длина пути сокращается примерно на треть. На практике это означает более быстрое изготовление, меньшее энергопотребление и меньший износ подвижных частей.
Проверка печати изогнутых форм
Чтобы оценить производительность системы, команда напечатала простые кубы и более сложные изогнутые волнообразные формы из пластика. Подбирая разрешение шагов двигателей и толщину слоёв, они значительно уменьшили видимые швы и эффект «ступеней», который обычно появляется на наклонных стенках. Роботизированная рука достигла более высоких скоростей наплавления, чем традиционный трёхосевой принтер, и смогла печатать гладкие формы с двухкриволинейной геометрией без дополнительной поддержки снизу. Измерения толщины слоёв и габаритов показали, что система может удерживать погрешности вблизи заданных значений даже на сложных геометриях.
Что это значит для будущего производства
В целом работа демонстрирует, что тщательно спроектированный открытый роботизированный манипулятор может превратить традиционную 3D-печать в более гибкий инструмент, который быстро и точно обрабатывает изогнутые формы. Комбинируя многоканальное движение, детальные математические модели, многоуровневую схему управления и интеллектуальное планирование траектории, этот подход упрощает создание индивидуальных деталей с гладкими поверхностями и меньшим количеством опор. Такие системы могут помочь внедрить продвинутое производство в небольшие лаборатории и мастерские, поддерживая приложения от архитектуры до медицинских устройств без зависимости от дорогих закрытых промышленных роботов.
Цитирование: Zhang, Q., Wang, J., Zhao, Z. et al. Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure. Sci Rep 16, 15417 (2026). https://doi.org/10.1038/s41598-026-46136-2
Ключевые слова: роботизированная 3D-печать, аддитивное производство, многоосевой робот, печать изогнутых поверхностей, планирование траекторий