Clear Sky Science · es
Evaluación de equipos de fabricación aditiva asistida por robots de código abierto para estructuras tridimensionales curvas fabricadas aditivamente
Robots que pueden imprimir formas curvas
La fabricación aditiva, a menudo llamada impresión 3D, normalmente construye objetos capa por capa sobre cortes planos. Eso funciona bien para piezas sencillas, pero tiene dificultades con curvas suaves y geometrías personalizadas. Este estudio presenta un sistema de impresión 3D basado en un robot de bajo coste y código abierto que puede moverse en múltiples direcciones simultáneamente, permitiendo crear superficies curvas complejas más rápido y con mejor calidad que una impresora de sobremesa estándar.

Un robot flexible para la impresión 3D
El corazón del sistema es un brazo robótico de seis articulaciones que sostiene una boquilla extrusora de plástico. A diferencia de una impresora típica de tres ejes que solo se mueve izquierda-derecha, adelante-atrás y arriba-abajo, este brazo puede girar y doblarse como un hombro, codo y muñeca humanos. Los investigadores definieron cuidadosamente cómo se conectan y mueven cada una de las articulaciones y luego utilizaron herramientas matemáticas para calcular dónde estará la punta del brazo en el espacio y cómo moverla hasta un punto deseado. Estos cálculos permiten que la boquilla siga trayectorias inclinadas y suaves alrededor de una pieza en lugar de apilar únicamente capas planas.
El cerebro detrás del brazo mecánico
Para coordinar este movimiento, el equipo construyó un sistema de control en capas usando software de ingeniería común y hardware económico. Un programa orientado al usuario supervisa cada articulación, alterna entre modos manual y automático y muestra datos operativos clave. Un pequeño controlador industrial ejecuta comandos en tiempo real, mientras que un entorno informático en segundo plano calcula trayectorias de movimiento complejas y señales para los motores. La retroalimentación de sensores ayuda a ajustar el movimiento en tiempo real. En conjunto, estos elementos permiten que el robot trace las trayectorias planificadas con precisión y mantenga la estabilidad, incluso cuando cambian velocidades y direcciones.
Decisiones de diseño que mejoran el movimiento
Los investigadores optimizaron tanto la estructura del robot como su sistema de accionamiento. Eligieron motores paso a paso con reducciones de relación, correas y engranajes sinfín para equilibrar par, velocidad y coste, y luego probaron estas opciones con simulaciones por ordenador de fuerzas, tensiones y vibraciones. Al modelar cómo se transmite la energía a través del sistema, diseñaron ajustes de control que mantienen el brazo en movimiento de forma suave. Los pasos finos del motor y las relaciones de engranaje proporcionan movimientos muy pequeños en la boquilla, lo que ayuda a depositar cada línea de plástico con incrementos a escala micrométrica, algo importante para superficies detalladas.
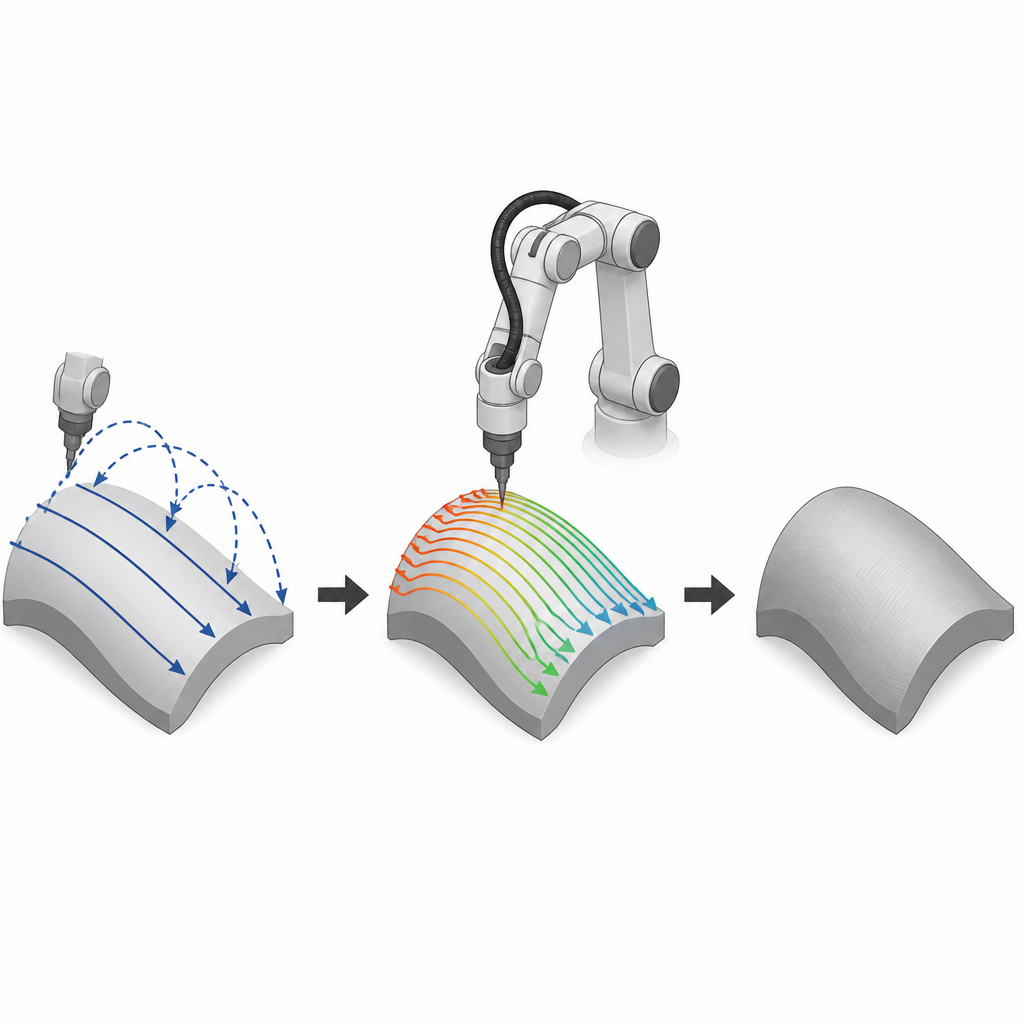
Trayectorias más inteligentes para una impresión más rápida
Más allá del hardware, el estudio se centra en cómo el robot elige su trayectoria de impresión. El equipo desarrolló un algoritmo que divide cada capa en segmentos de línea cortos y luego los reordena de modo que la boquilla siempre se desplace hacia el siguiente segmento cercano. Esto reduce los desplazamientos desperdiciados cuando no se está extruyendo plástico. Pruebas en una superficie ondulada muestran que, aunque la distancia total de impresión se mantiene, los “movimientos en vacío” caen drásticamente, reduciendo la longitud de estos desplazamientos a más de la mitad y acortando la longitud total de la trayectoria en aproximadamente un tercio. En la práctica, eso se traduce en construcciones más rápidas, menor consumo energético y menos desgaste de las piezas móviles.
Poniendo a prueba la impresión curva
Para evaluar el rendimiento del sistema, el equipo imprimió cubos sencillos y formas onduladas y curvas más desafiantes en plástico. Al ajustar la resolución del paso del motor y el espesor de las capas, redujeron significativamente las costuras visibles y el efecto de escalera que suele aparecer en paredes inclinadas. El brazo robótico alcanzó velocidades de deposición mayores que una impresora tradicional de tres ejes y fue capaz de imprimir formas suaves con doble curvatura sin material de soporte adicional debajo. Las mediciones de espesor de capa y dimensiones generales mostraron que el sistema puede mantener los errores cerca de los valores previstos, incluso en geometrías complejas.
Qué significa esto para la fabricación futura
En conjunto, el trabajo demuestra que un brazo robótico de código abierto diseñado con cuidado puede convertir la impresión 3D convencional en una herramienta más flexible capaz de manejar formas curvas de manera rápida y precisa. Al combinar movimiento multidireccional, modelos matemáticos detallados, un esquema de control en capas y planificación de trayectorias más inteligente, este enfoque facilita la creación de piezas personalizadas con superficies lisas y menos soportes. Tales sistemas podrían ayudar a llevar la fabricación avanzada a laboratorios y talleres más pequeños, respaldando aplicaciones desde la arquitectura hasta dispositivos médicos sin depender de robots industriales cerrados y costosos.
Cita: Zhang, Q., Wang, J., Zhao, Z. et al. Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure. Sci Rep 16, 15417 (2026). https://doi.org/10.1038/s41598-026-46136-2
Palabras clave: impresión 3D robótica, fabricación aditiva, robot multi-eje, impresión de superficies curvas, planificación de trayectorias