Clear Sky Science · pl
Ocena otwartoźródłowego sprzętu do addytywnej produkcji wspomaganej robotycznie dla addytywnie wytwarzanych trójwymiarowych struktur krzywoliniowych
Roboty, które potrafią drukować kształty krzywoliniowe
Produkcja addytywna, często nazywana drukiem 3D, zwykle buduje obiekty warstwa po warstwie na płaskich przekrojach. Dobrze sprawdza się to w prostych częściach, ale ma trudności z gładkimi krzywiznami i niestandardowymi kształtami. W tym badaniu przedstawiono niskokosztowy, otwartoźródłowy system druku 3D oparty na robocie, który może poruszać się w wielu kierunkach jednocześnie, pozwalając tworzyć złożone krzywoliniowe powierzchnie szybciej i w lepszej jakości niż standardowa drukarka biurkowa.

Elastyczny robot do druku 3D
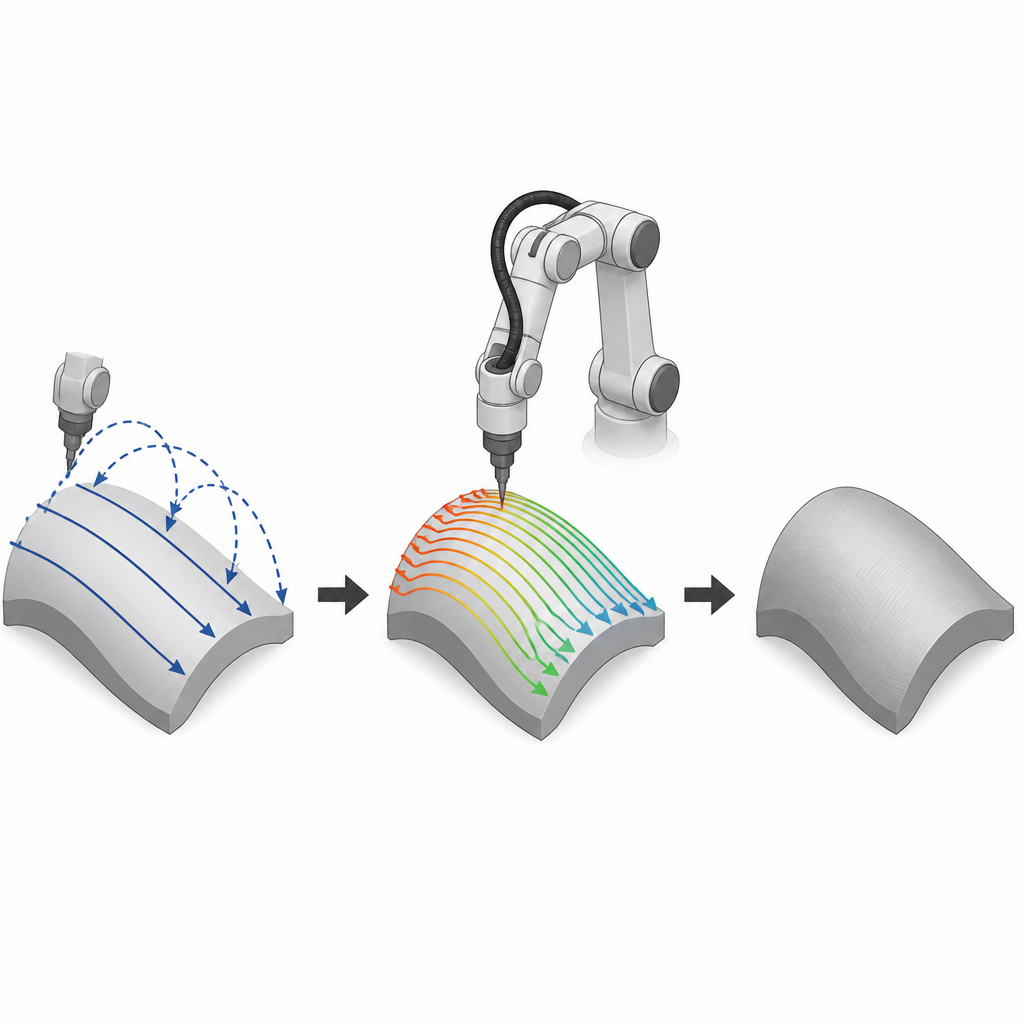
Rdzeniem systemu jest sześciostawowe ramię robotyczne, które trzyma dyszę do wytłaczania tworzywa. W przeciwieństwie do typowej trójosiowej drukarki, która porusza się tylko w lewo‑prawo, przód‑tył i góra‑dół, to ramię może obracać się i zginać jak ludzka łopatka, łokieć i nadgarstek. Badacze starannie określili, jak każdy staw jest połączony i porusza się, a następnie użyli narzędzi matematycznych, aby obliczyć, gdzie końcówka ramienia będzie w przestrzeni i jak przesunąć ją do żądanej pozycji. Te obliczenia pozwalają dyszy podążać gładkimi, nachylonymi ścieżkami wokół części zamiast układać wyłącznie płaskie warstwy.
Mózg stojący za mechanicznym ramieniem
Aby koordynować ten ruch, zespół zbudował warstwowy system sterowania wykorzystujący powszechne oprogramowanie inżynierskie i niedrogi hardware. Program dla użytkownika monitoruje każdy staw, przełącza między trybem ręcznym a automatycznym i wyświetla kluczowe dane operacyjne. Mały sterownik przemysłowy wykonuje polecenia w czasie rzeczywistym, podczas gdy środowisko obliczeniowe w tle opracowuje złożone trajektorie ruchu i sygnały silników. Informacja zwrotna z czujników pomaga korygować ruch w locie. Razem te elementy pozwalają robotowi precyzyjnie odwzorowywać zaplanowane ścieżki, zachowując stabilność nawet przy zmianach prędkości i kierunku.
Wybory konstrukcyjne poprawiające ruch
Badacze zoptymalizowali zarówno strukturę robota, jak i jego układ napędowy. Wybrali silniki krokowe z przekładniami, pasami i przekładniami ślimakowymi, aby zrównoważyć moment obrotowy, prędkość i koszt, a następnie przetestowali te rozwiązania za pomocą symulacji komputerowych sił, naprężeń i drgań. Modelując, jak energia przemieszcza się przez system, zaprojektowali ustawienia sterowania, które utrzymują ramię w płynnym ruchu. Drobne kroki silnika i przełożenia przekładni zapewniają bardzo małe przesunięcia na dyszy, co pomaga drukarce umieszczać każdą linię tworzywa z dokładnością rzędu mikronów — istotne dla szczegółowych powierzchni.
Inteligentniejsze trajektorie dla szybszego druku
Ponad aspekty sprzętowe, badanie koncentruje się na tym, jak robot wybiera ścieżkę drukowania. Zespół opracował algorytm, który dzieli każdą warstwę na krótkie odcinki linii, a następnie porządkuje je tak, aby dysza zawsze przechodziła do następnego pobliskiego segmentu. Zmniejsza to zbędne przemieszczenia, gdy tworzywo nie jest wytłaczane. Testy na falistej powierzchni pokazują, że chociaż całkowity dystans drukowania pozostaje podobny, „przeloty powietrzne” spadają gwałtownie, skracając długość przemieszczeń o ponad połowę i zmniejszając ogólną długość ścieżki o około jedną trzecią. W praktyce oznacza to szybsze budowy, niższe zużycie energii i mniejsze zużycie elementów ruchomych.
Testy drukowania krzywoliniowego
Aby sprawdzić wydajność systemu, zespół wydrukował proste kostki i bardziej wymagające, krzywoliniowe, faliste kształty z tworzywa. Poprzez dostrojenie rozdzielczości kroków silnika i grubości warstw znacząco zredukowali widoczne szwy i efekt stopniowania, który zwykle pojawia się na nachylonych ścianach. Ramię robotyczne osiągnęło wyższe prędkości nakładania niż tradycyjna drukarka trójosiowa i było w stanie drukować gładkie formy o podwójnej krzywiźnie bez dodatkowego materiału podporowego pod spodem. Pomiary grubości warstw i wymiarów wykazały, że system może utrzymywać błędy blisko wartości zamierzonych, nawet przy złożonych geometriach.
Znaczenie dla przyszłego wytwarzania
Podsumowując, praca pokazuje, że starannie zaprojektowane, otwartoźródłowe ramię robotyczne może przekształcić standardowy druk 3D w bardziej elastyczne narzędzie, które radzi sobie z kształtami krzywoliniowymi szybko i precyzyjnie. Łącząc ruch wielokierunkowy, szczegółowe modele matematyczne, warstwowy schemat sterowania i inteligentne planowanie trajektorii, podejście to ułatwia tworzenie niestandardowych części z gładkimi powierzchniami i mniejszą liczbą podpór. Takie systemy mogą pomóc w przeniesieniu zaawansowanej produkcji do mniejszych laboratoriów i warsztatów, wspierając zastosowania od architektury po urządzenia medyczne, bez polegania na drogich, zamkniętych robotach przemysłowych.
Cytowanie: Zhang, Q., Wang, J., Zhao, Z. et al. Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure. Sci Rep 16, 15417 (2026). https://doi.org/10.1038/s41598-026-46136-2
Słowa kluczowe: robotyczny druk 3D, addytywna produkcja, robot wieloosiowy, druk powierzchni krzywoliniowej, planowanie trajektorii