Clear Sky Science · de
Bewertung eines Open-Source-robotergestützten additiven Fertigungssystems für additiv gefertigte dreidimensionale gekrümmte Strukturen
Roboter, die gekrümmte Formen drucken können
Additive Fertigung, oft 3D-Druck genannt, baut Objekte in der Regel Schicht für Schicht auf flachen Schnitten auf. Das funktioniert gut für einfache Bauteile, hat aber Schwierigkeiten mit glatten Kurven und individuellen Formen. Diese Studie stellt ein kostengünstiges, Open-Source-robotergestütztes 3D-Drucksystem vor, das sich gleichzeitig in viele Richtungen bewegen kann und so komplexe gekrümmte Flächen schneller und mit besserer Qualität erzeugt als ein typischer Desktop-Drucker.

Ein flexibler Roboter für den 3D-Druck
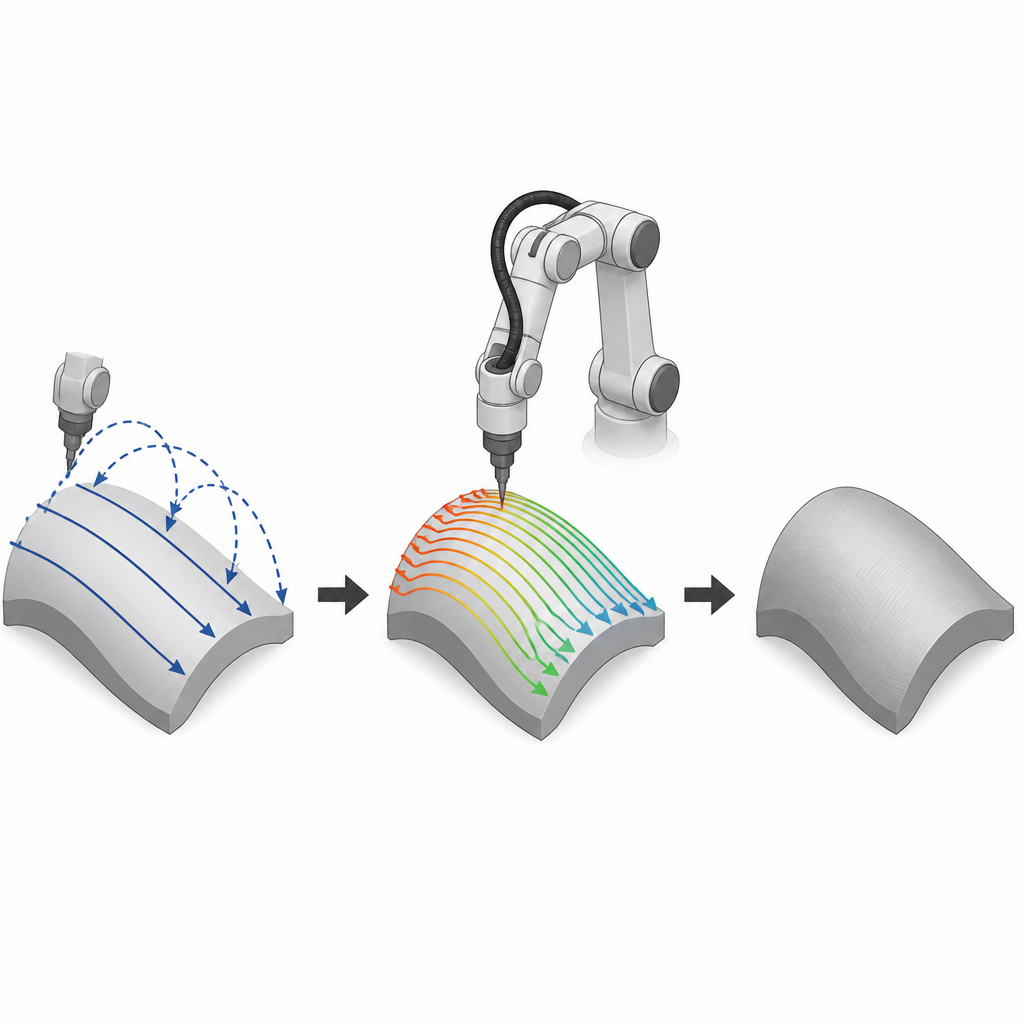
Das Herz des Systems ist ein sechs-achsiger Roboterarm, der eine kunststoffextrudierende Düse hält. Anders als ein typischer Drei-Achsen-Drucker, der sich nur nach links-rechts, vor-zurück und auf-ab bewegt, kann dieser Arm schwenken und beugen wie Schulter, Ellenbogen und Handgelenk eines Menschen. Die Forschenden definierten sorgfältig, wie jedes Gelenk verbunden ist und sich bewegt, und nutzten dann mathematische Werkzeuge, um zu berechnen, wo sich die Spitze des Arms im Raum befindet und wie sie zu einem gewünschten Punkt bewegt werden muss. Diese Berechnungen erlauben es der Düse, glatten, geneigten Bahnen um ein Bauteil zu folgen, statt nur flache Schichten zu stapeln.
Die Steuerung hinter dem mechanischen Arm
Um diese Bewegung zu koordinieren, entwickelte das Team ein geschichtetes Steuerungssystem unter Verwendung gängiger Ingenieurssoftware und preiswerter Hardware. Ein benutzerorientiertes Programm überwacht jedes Gelenk, wechselt zwischen manuellen und automatischen Modi und zeigt wichtige Betriebsdaten an. Ein kleiner Industrie-Controller führt Befehle in Echtzeit aus, während eine Rechenumgebung im Hintergrund komplexe Bewegungsbahnen und Motorsignale berechnet. Rückmeldungen von Sensoren helfen, die Bewegung sofort anzupassen. Zusammengenommen ermöglichen diese Elemente dem Roboter, geplanten Bahnen genau zu folgen und dabei stabil zu bleiben, selbst wenn Geschwindigkeiten und Richtungen wechseln.
Konstruktionsentscheidungen, die die Bewegung verbessern
Die Forschenden optimierten sowohl die Struktur des Roboters als auch sein Antriebssystem. Sie wählten Schrittmotoren mit Übersetzungen, Zahnriemen und Schneckengetrieben, um Drehmoment, Geschwindigkeit und Kosten auszubalancieren, und testeten diese Entscheidungen anschließend mit Computersimulationen von Kräften, Spannungen und Schwingungen. Durch die Modellierung, wie Energie durch das System fließt, entwarfen sie Regelungseinstellungen, die den Arm gleichmäßig bewegen. Feine Motorstufen und Getriebeübersetzungen erzeugen sehr kleine Düsenbewegungen, wodurch der Drucker jede Kunststofflinie in Mikrometer-Schritten platzieren kann — wichtig für detailreiche Oberflächen.
Intelligentere Bahnen für schnelleres Drucken
Über die Hardware hinaus konzentriert sich die Studie darauf, wie der Roboter seinen Druckpfad wählt. Das Team entwickelte einen Algorithmus, der jede Schicht in kurze Liniensegmente aufteilt und diese dann so umordnet, dass die Düse stets zum nächstgelegenen Segment weiterfährt. Das reduziert unnötige Fahrten, wenn kein Kunststoff extrudiert wird. Tests an einer wellenförmigen Oberfläche zeigen, dass zwar die Gesamt-Druckstrecke gleich bleibt, die „Leerfahrten“ jedoch stark sinken, die Fahrstrecke mehr als halbiert und die Gesamtlänge des Pfads um etwa ein Drittel verkürzt wird. Praktisch bedeutet das schnellere Fertigung, geringeren Energieverbrauch und weniger Verschleiß an beweglichen Teilen.
Gekrümmtes Drucken im Praxistest
Um die Leistungsfähigkeit des Systems zu prüfen, druckte das Team einfache Würfel und anspruchsvollere gekrümmte, wellenartige Formen aus Kunststoff. Durch Abstimmung der Motorstufenauflösung und Schichthöhe reduzierten sie sichtbar Nähte und den Treppeneffekt, der üblicherweise an geneigten Wänden auftritt. Der Roboterarm erreichte höhere Depositationsgeschwindigkeiten als ein traditioneller Drei-Achsen-Drucker und konnte glatte, doppelt gekrümmte Formen ohne zusätzliche Stützmaterialien darunter drucken. Messungen der Schichthöhe und der Gesamtgröße zeigten, dass das System Fehler nahe den intendierten Werten halten kann, selbst bei komplexen Geometrien.
Was das für zukünftiges Herstellen bedeutet
Insgesamt zeigt die Arbeit, dass ein sorgfältig gestalteter Open-Source-Roboterarm den Standard-3D-Druck in ein flexibleres Werkzeug verwandeln kann, das gekrümmte Formen schnell und genau handhabt. Durch die Kombination multidirektionaler Bewegungen, detaillierter mathematischer Modelle, eines geschichteten Steuerungsschemas und intelligenter Pfadplanung erleichtert dieser Ansatz die Herstellung maßgeschneiderter Teile mit glatten Oberflächen und weniger Stützen. Solche Systeme könnten dazu beitragen, fortgeschrittene Fertigung in kleinere Labore und Werkstätten zu bringen und Anwendungen von Architektur bis zu medizinischen Geräten zu unterstützen, ohne auf teure geschlossene Industrieroboter angewiesen zu sein.
Zitation: Zhang, Q., Wang, J., Zhao, Z. et al. Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure. Sci Rep 16, 15417 (2026). https://doi.org/10.1038/s41598-026-46136-2
Schlüsselwörter: robotergestützter 3D-Druck, additive Fertigung, Mehrachsenroboter, Gekrümmte Flächendruck, Pfadplanung