Clear Sky Science · sv
Utvärdering av öppen källkodsrobot-assisterad additiv tillverkning för additivt tillverkade tredimensionella kurvade strukturer
Robotar som kan skriva ut kurvade former
Additiv tillverkning, ofta kallad 3D-utskrift, bygger vanligtvis objekt lager för lager på plana skivor. Det fungerar väl för enkla komponenter men har svårt med jämna kurvor och specialformade geometrier. Denna studie presenterar ett lågkostnads, öppen källkodsbaserat robotiskt 3D-skrivarsystem som kan röra sig i många riktningar samtidigt, vilket låter det skapa komplexa kurvade ytor snabbare och med bättre kvalitet än en vanlig stationär skrivare.

En flexibel robot för 3D-utskrift
Systemets kärna är en sexleder robotarm som håller ett plastextruderande munstycke. Till skillnad från en typisk treaxlig skrivare som bara rör sig vänster-höger, fram-bak och upp-ner, kan denna arm vrida och böja sig som en människas axel, armbåge och handled. Forskarna definierade noggrant hur varje led är kopplad och rör sig, och använde sedan matematiska verktyg för att beräkna var armens spets befinner sig i rummet och hur den ska röra sig till en önskad punkt. Dessa beräkningar gör det möjligt för munstycket att följa jämna, lutade banor runt en detalj i stället för att endast stapla platta lager.
Hjärnan bakom den mekaniska armen
För att koordinera denna rörelse byggde teamet ett flerskiktat styrsystem med vanliga ingenjörsprogram och billig hårdvara. Ett användargränssnitt övervakar varje led, växlar mellan manuellt och automatiskt läge och visar nyckeldata om drift. En liten industriell styrning utför kommandon i realtid, medan en bakgrundsmiljö på datorn räknar ut komplexa rörelsebanor och motorsignaler. Feedback från sensorer hjälper till att justera rörelsen i farten. Tillsammans låter dessa element roboten spåra planerade banor noggrant samtidigt som den förblir stabil, även när hastigheter och riktningar ändras.
Designval som förbättrar rörelsen
Forskarna optimerade både robotens struktur och dess drivsystem. De valde stegmotorer med växlar, remmar och snigelväxlar för att balansera vridmoment, hastighet och kostnad, och testade sedan dessa val med datorsimuleringar av krafter, påfrestningar och vibrationer. Genom att modellera hur energi rör sig genom systemet designade de styrinställningar som håller armen i jämn rörelse. Finmotoriska steg och växelförhållanden ger mycket små rörelser vid munstycket, vilket hjälper skrivaren placera varje plastlinje inom mikrometers noggrannhet — viktigt för detaljerade ytor.
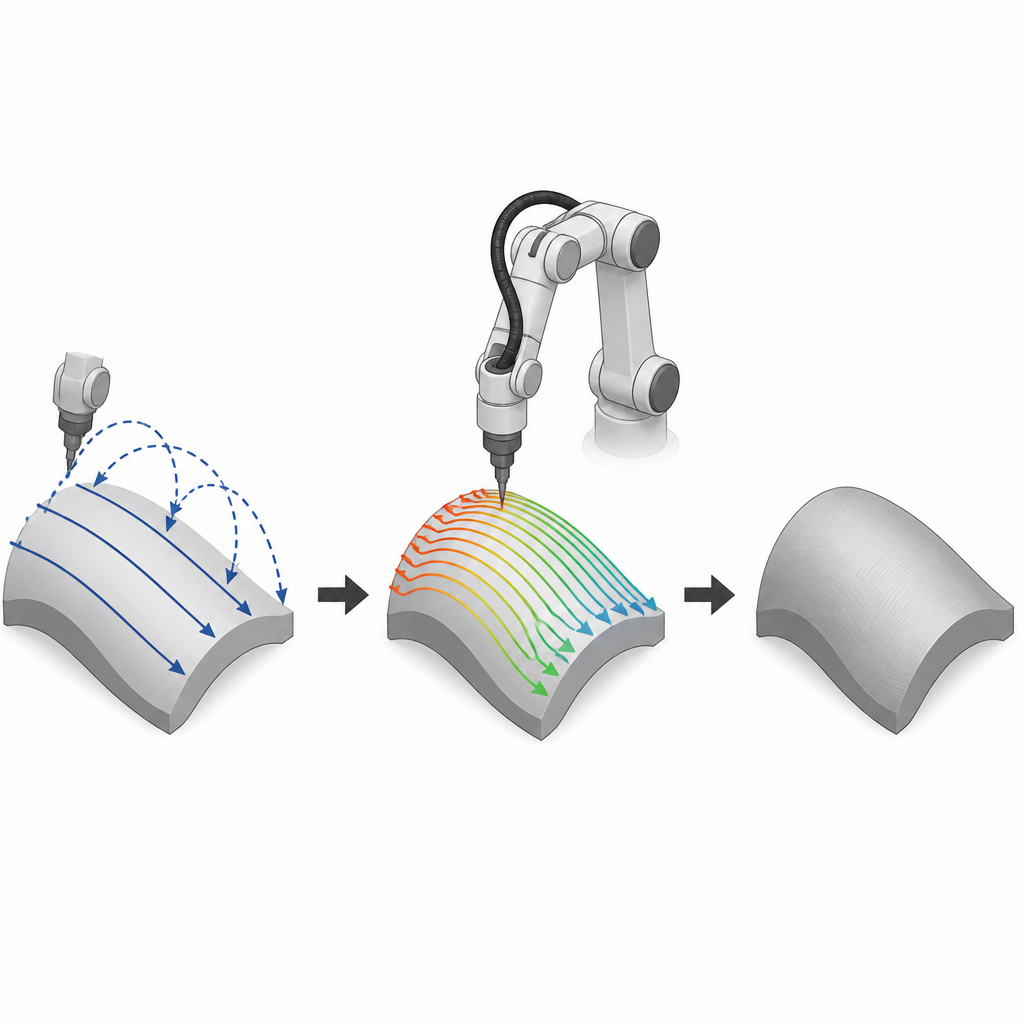
Smartare banor för snabbare utskrift
Bortom hårdvaran fokuserar studien på hur roboten väljer sin utskriftsbana. Teamet utvecklade en algoritm som delar upp varje lager i korta linjesegment och sedan omordnar dem så att munstycket alltid rör sig till nästa närliggande segment. Detta minskar onödig förflyttning när ingen plast extruderas. Tester på en vågformad yta visar att även om den totala utskriftsdistansen förblir densamma, sjunker "luftförflyttningarna" kraftigt, vilket halverar reststräckan och förkortar den totala banlängden med ungefär en tredjedel. I praktiken betyder det snabbare byggande, lägre energianvändning och mindre slitage på rörliga delar.
Sätta kurvad utskrift på prov
För att se hur väl systemet presterar skrev teamet ut enkla kuber och mer utmanande kurvade, vågliknande former i plast. Genom att fininställa motorstegupplösning och lagertjocklek minskade de synliga skarvar och trappstegseffekten som vanligtvis uppstår på sluttande ytor. Robotarmen uppnådde högre deponeringshastigheter än en traditionell treaxlig skrivare och kunde printa jämna, dubbelkrökta former utan extra stödmaterial underifrån. Mätningar av lagertjocklek och total storlek visade att systemet kan hålla fel nära de avsedda värdena, även på komplexa geometrier.
Vad detta betyder för framtidens tillverkning
Sammanfattningsvis visar arbetet att en omsorgsfullt designad, öppen källkodsrobotarm kan förvandla standard 3D-utskrift till ett mer flexibelt verktyg som hanterar kurvade former snabbt och precist. Genom att kombinera fleraxlig rörelse, detaljerade matematiska modeller, ett flerskiktat styrschema och smartare banplanering gör detta tillvägagångssätt det enklare att skapa kundanpassade delar med jämna ytor och färre stöd. Sådana system kan hjälpa till att föra avancerad tillverkning in i mindre laboratorier och verkstäder och stödja tillämpningar från arkitektur till medicinteknik utan att vara beroende av dyra slutna industrirobotar.
Citering: Zhang, Q., Wang, J., Zhao, Z. et al. Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure. Sci Rep 16, 15417 (2026). https://doi.org/10.1038/s41598-026-46136-2
Nyckelord: robotisk 3D-utskrift, additiv tillverkning, fleraxlig robot, utskrift av kurvade ytor, banplanering