Clear Sky Science · it
Valutazione di attrezzature open-source di produzione additiva assistita da robot per strutture curve tridimensionali prodotte additivamente
Robot in grado di stampare forme curve
La produzione additiva, spesso chiamata stampa 3D, costruisce di solito gli oggetti strato dopo strato su sezioni piatte. Questo approccio funziona bene per pezzi semplici ma mostra limiti con curve morbide e geometrie personalizzate. Questo studio presenta un sistema di stampa 3D basato su robot, open-source e a basso costo, in grado di muoversi in più direzioni contemporaneamente, permettendo di creare superfici curve complesse più rapidamente e con una qualità migliore rispetto a una stampante da scrivania standard.

Un robot flessibile per la stampa 3D
Il cuore del sistema è un braccio robotico a sei giunti che sostiene un ugello estrusore per plastica. A differenza di una tipica stampante a tre assi che si muove solo destra-sinistra, avanti-indietro e su-giù, questo braccio può ruotare e flettersi come una spalla, un gomito e un polso umano. I ricercatori hanno definito con cura come ogni giunto è collegato e si muove, quindi hanno utilizzato strumenti matematici per calcolare dove si troverà la punta del braccio nello spazio e come spostarla verso un punto desiderato. Questi calcoli permettono all’ugello di seguire percorsi inclinati e continui attorno al pezzo invece di impilare soltanto strati piatti.
Il cervello dietro il braccio meccanico
Per coordinare questo movimento, il team ha costruito un sistema di controllo a più livelli usando software ingegneristico comune e hardware economico. Un programma rivolto all’utente monitora ogni giunto, commuta tra modalità manuale e automatica e visualizza i dati operativi principali. Un piccolo controllore industriale esegue i comandi in tempo reale, mentre un ambiente di calcolo in background elabora percorsi di movimento complessi e segnali motore. Il feedback dai sensori aiuta ad aggiustare il movimento al volo. Insieme, questi elementi consentono al robot di tracciare percorsi pianificati con precisione mantenendo la stabilità, anche quando cambiano velocità e direzioni.
Scelte progettuali che migliorano il movimento
I ricercatori hanno ottimizzato sia la struttura del robot sia il suo sistema di trasmissione. Hanno scelto motori passo-passo con riduzioni, cinghie e ingranaggi a vite senza fine per bilanciare coppia, velocità e costo, e poi hanno testato queste scelte con simulazioni al computer di forze, sollecitazioni e vibrazioni. Modellando come l’energia si propaga nel sistema, hanno progettato impostazioni di controllo che mantengono il braccio in movimento in modo uniforme. Passi motore fini e rapporti di trasmissione permettono movimenti molto piccoli all’ugello, aiutando la stampante a depositare ogni linea di plastica con incrementi dell’ordine dei micron, importante per superfici dettagliate.
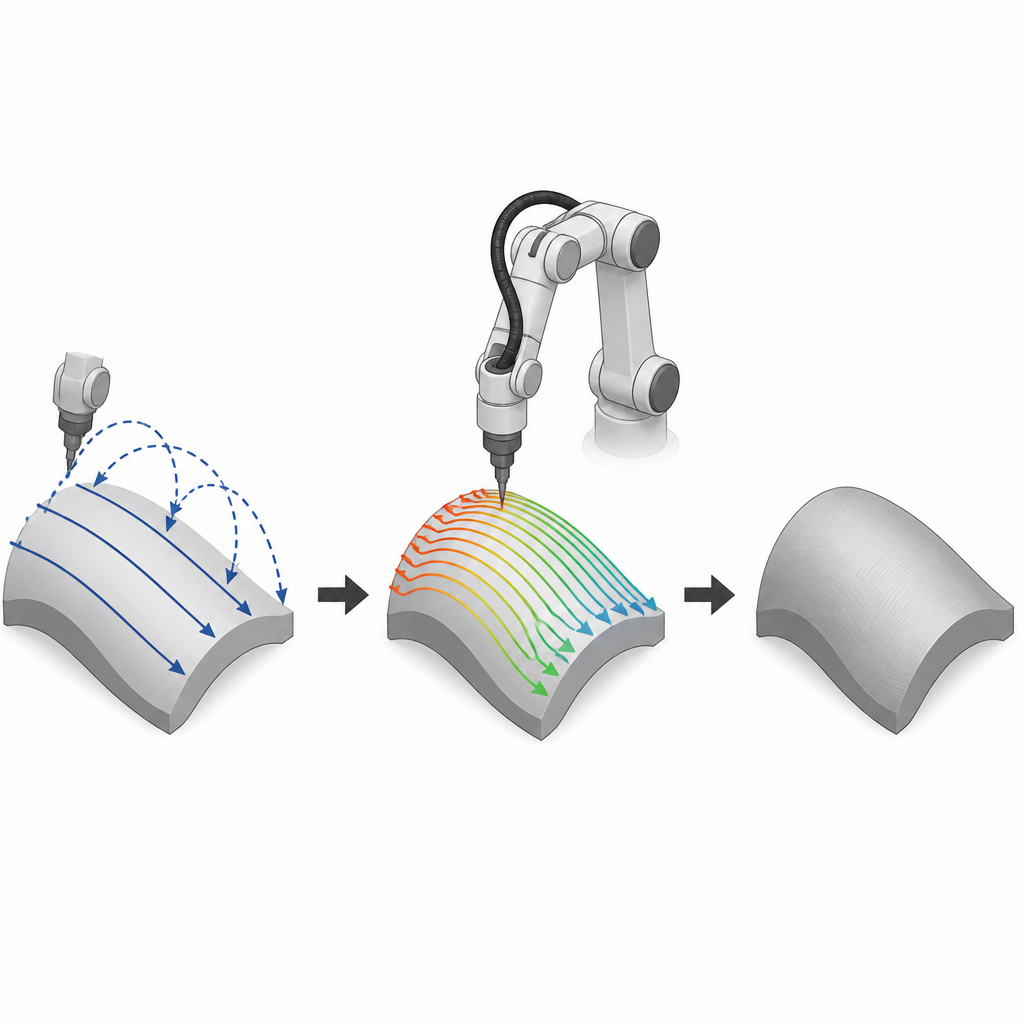
Percorsi più intelligenti per una stampa più rapida
Oltre all’hardware, lo studio si concentra su come il robot sceglie il percorso di stampa. Il team ha sviluppato un algoritmo che suddivide ogni strato in brevi segmenti lineari, quindi li riordina in modo che l’ugello si sposti sempre al segmento successivo più vicino. Questo riduce i trasferimenti a vuoto quando non viene estrusa plastica. Test su una superficie ondulata mostrano che, mentre la distanza di stampa totale rimane simile, i "movimenti a vuoto" diminuiscono drasticamente, riducendo la lunghezza dei trasferimenti di oltre la metà e accorciando la lunghezza complessiva del percorso di circa un terzo. In pratica, ciò si traduce in costruzioni più veloci, minor consumo energetico e minore usura delle parti in movimento.
Mettere alla prova la stampa curva
Per valutare le prestazioni del sistema, il team ha stampato semplici cubi e forme ondulate e curve più impegnative in plastica. Regolando la risoluzione dei passi del motore e lo spessore degli strati, hanno ridotto in modo significativo le cuciture visibili e l’effetto a scalini che appare di solito sulle pareti inclinate. Il braccio robotico ha raggiunto velocità di deposizione superiori rispetto a una stampante tradizionale a tre assi ed è stato in grado di stampare forme lisce e doppiamente curve senza richiedere materiale di supporto sottostante. Le misurazioni dello spessore degli strati e delle dimensioni complessive hanno mostrato che il sistema può mantenere gli errori vicini ai valori previsti, anche su geometrie complesse.
Cosa significa per la manifattura futura
Complessivamente, il lavoro dimostra che un braccio robotico open-source progettato con cura può trasformare la stampa 3D standard in uno strumento più flessibile, capace di gestire forme curve rapidamente e con precisione. Combinando movimento multidirezionale, modelli matematici dettagliati, uno schema di controllo a livelli e una pianificazione dei percorsi più intelligente, questo approccio semplifica la creazione di pezzi personalizzati con superfici lisce e meno supporti. Sistemi di questo tipo potrebbero aiutare a portare la manifattura avanzata in laboratori e officine più piccoli, supportando applicazioni dall’architettura ai dispositivi medici senza affidarsi a costosi robot industriali chiusi.
Citazione: Zhang, Q., Wang, J., Zhao, Z. et al. Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure. Sci Rep 16, 15417 (2026). https://doi.org/10.1038/s41598-026-46136-2
Parole chiave: stampa 3D robotica, produzione additiva, robot multi asse, stampa di superfici curve, pianificazione del percorso