Clear Sky Science · nl
Evaluatie van open-source robotgeassisteerde additieve productiemachines voor additief vervaardigde driedimensionale gebogen structuren
Robots die gebogen vormen kunnen printen
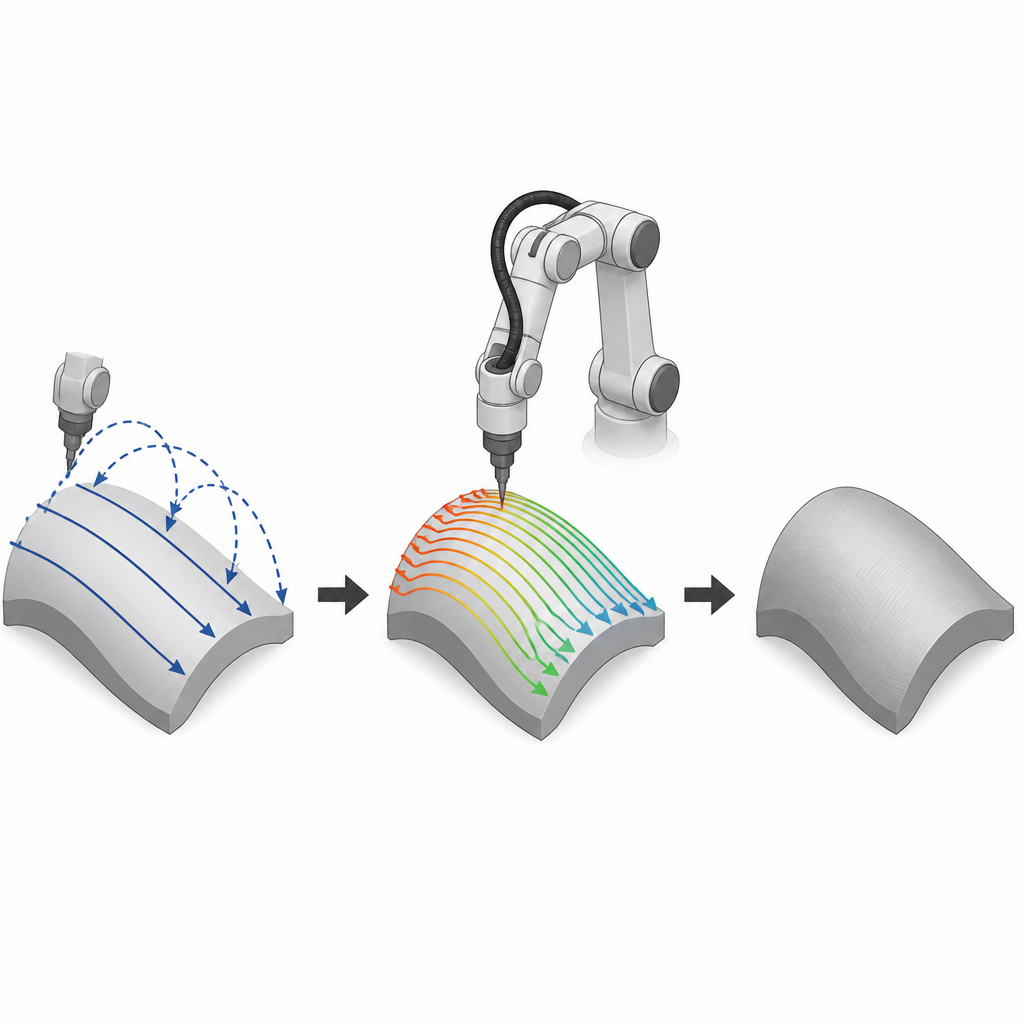
Additieve productie, vaak 3D-printen genoemd, bouwt objecten gewoonlijk laag voor laag op vlakke sneden. Dat werkt goed voor eenvoudige onderdelen maar heeft moeite met vloeiende krommen en aangepaste vormen. Deze studie presenteert een goedkope, open-source robotgebaseerde 3D-printer die tegelijk in veel richtingen kan bewegen, waardoor hij complexe gebogen oppervlakken sneller en met betere kwaliteit kan maken dan een standaard desktopprinter.

Een flexibele robot voor 3D-printen
De kern van het systeem is een zes-sgewijze robotarm die een nozzle voor het extruderen van kunststof vasthoudt. In tegenstelling tot een typische drie-assige printer die alleen links-rechts, voor-achter en op-neer beweegt, kan deze arm draaien en buigen als een menselijke schouder, elleboog en pols. De onderzoekers hebben zorgvuldig gedefinieerd hoe elke scharnier is verbonden en beweegt, en gebruikten vervolgens wiskundige hulpmiddelen om te berekenen waar de punt van de arm in de ruimte zal zijn en hoe die naar een gewenste positie te verplaatsen. Deze berekeningen laten de nozzle vloeiende, gekantelde paden rondom een onderdeel volgen in plaats van alleen vlakke lagen op te stapelen.
Het brein achter de mechanische arm
Om deze beweging te coördineren, bouwde het team een gelaagd besturingssysteem met gebruikelijke ingenieurssoftware en goedkope hardware. Een gebruikersprogramma bewaakt elke scharnier, schakelt tussen handmatige en automatische modi en toont belangrijke bedieningsgegevens. Een kleine industriële controller voert commando’s in realtime uit, terwijl een computeromgeving op de achtergrond complexe bewegingspaden en motorsignalen uitrekent. Feedback van sensoren helpt de beweging onderweg bij te stellen. Samen zorgen deze elementen ervoor dat de robot geplande paden nauwkeurig volgt en stabiel blijft, zelfs wanneer snelheden en richtingen veranderen.
Ontwerpskeuzes die de beweging verbeteren
De onderzoekers optimaliseerden zowel de robotstructuur als het aandrijfsysteem. Ze kozen stappermotoren met tandwielreducties, riemen en wormwielen om koppel, snelheid en kosten in balans te brengen, en testten deze keuzes met computersimulaties van krachten, spanningen en trillingen. Door te modelleren hoe energie door het systeem stroomt, ontwierpen ze regelinstellingen die de arm vloeiend laten bewegen. Fijne motorstappen en overbrengingsverhoudingen geven zeer kleine bewegingen aan de nozzle, waardoor de printer elke plasticbaan binnen micron-schaal stappen kan plaatsen, wat belangrijk is voor gedetailleerde oppervlakken.
Slimmere paden voor sneller printen
Buiten de hardware richt de studie zich op hoe de robot zijn printpad kiest. Het team ontwikkelde een algoritme dat elke laag in korte lijnsegmenten opsplitst en deze vervolgens herschikt zodat de nozzle altijd naar het volgende nabijgelegen segment beweegt. Dit vermindert verspilde bewegingen wanneer er geen kunststof wordt geëxtrudeerd. Tests op een golvend oppervlak tonen aan dat hoewel de totale printafstand hetzelfde blijft, de “luchtbewegingen” sterk dalen, waardoor de reislengte met meer dan de helft afneemt en de totale padlengte met ongeveer een derde verkort wordt. In de praktijk betekent dat snellere bouwtijden, lager energieverbruik en minder slijtage aan bewegende onderdelen.
Gebogen printen op de proef gesteld
Om te beoordelen hoe goed het systeem presteert, printte het team eenvoudige kubussen en uitdagendere gebogen, golfachtige vormen in kunststof. Door de motorstapresolutie en laagdikte af te stemmen, verminderden ze zichtbaar naden en het traptrede-effect dat gewoonlijk op schuine wanden verschijnt aanzienlijk. De robotarm behaalde hogere depositiesnelheden dan een traditionele drie-assige printer en kon gladde, dubbelgebogen vormen printen zonder extra ondersteuningsmateriaal eronder. Metingen van laagdikte en totale afmeting toonden aan dat het systeem fouten dicht bij de beoogde waarden kan houden, zelfs bij complexe geometrieën.
Wat dit betekent voor toekomstig maken
Al met al toont het werk aan dat een zorgvuldig ontworpen, open-source robotarm standaard 3D-printen kan veranderen in een flexibeler gereedschap dat gebogen vormen snel en nauwkeurig verwerkt. Door multidirectionele bewegingen, gedetailleerde wiskundige modellen, een gelaagde besturingsaanpak en slimere padplanning te combineren, maakt deze benadering het eenvoudiger om aangepaste onderdelen met vloeiende oppervlakken en minder supports te maken. Dergelijke systemen kunnen helpen geavanceerde productie naar kleinere laboratoria en werkplaatsen te brengen en toepassingen ondersteunen van architectuur tot medische hulpmiddelen zonder afhankelijk te zijn van dure gesloten industriële robots.
Bronvermelding: Zhang, Q., Wang, J., Zhao, Z. et al. Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure. Sci Rep 16, 15417 (2026). https://doi.org/10.1038/s41598-026-46136-2
Trefwoorden: robotisch 3D-printen, additieve productie, multi-as robot, printen van gebogen oppervlakken, padplanning