Clear Sky Science · fr
Évaluation d’un équipement open source d’additive manufacturing assisté par robot pour des structures tridimensionnelles courbes fabriquées par impression
Des robots capables d’imprimer des formes courbes
La fabrication additive, souvent appelée impression 3D, construit généralement les objets couche par couche en tranches plates. Cela fonctionne bien pour des pièces simples mais peine avec des courbes lisses et des formes personnalisées. Cette étude présente un système d’impression 3D robotisé open source et peu coûteux capable de se déplacer dans de nombreuses directions à la fois, ce qui lui permet de créer des surfaces courbes complexes plus rapidement et avec une meilleure qualité qu’une imprimante de bureau classique.

Un robot flexible pour l’impression 3D
Le cœur du système est un bras robotique à six articulations qui porte une buse extrudeuse de plastique. Contrairement à une imprimante classique à trois axes qui ne se déplace que gauche-droite, avant-arrière et haut-bas, ce bras peut pivoter et se plier comme une épaule, un coude et un poignet humains. Les chercheurs ont défini avec précision la façon dont chaque articulation est reliée et se déplace, puis ont utilisé des outils mathématiques pour calculer la position de la pointe du bras dans l’espace et comment la déplacer vers un point désiré. Ces calculs permettent à la buse de suivre des trajectoires inclinées et lisses autour d’une pièce au lieu d’empiler uniquement des couches plates.
L’intelligence derrière le bras mécanique
Pour coordonner ces mouvements, l’équipe a construit un système de contrôle en couches utilisant des logiciels d’ingénierie courants et du matériel peu coûteux. Un programme orienté utilisateur surveille chaque articulation, bascule entre modes manuel et automatique, et affiche les données opérationnelles clés. Un petit contrôleur industriel exécute les commandes en temps réel, tandis qu’un environnement informatique en arrière-plan calcule des trajectoires complexes et les signaux moteurs. Des retours de capteurs aident à ajuster le mouvement en temps réel. Ensemble, ces éléments permettent au robot de suivre fidèlement des trajectoires planifiées tout en restant stable, même lorsque vitesses et directions changent.
Choix de conception qui améliorent le mouvement
Les chercheurs ont optimisé à la fois la structure du robot et son système d’entraînement. Ils ont choisi des moteurs pas à pas avec réducteurs, courroies et vis sans fin pour équilibrer couple, vitesse et coût, puis ont testé ces choix par des simulations informatiques des forces, contraintes et vibrations. En modélisant la façon dont l’énergie circule dans le système, ils ont conçu des réglages de contrôle qui maintiennent un mouvement fluide du bras. Des pas moteurs fins et des rapports de démultiplication adaptés procurent des déplacements très petits au niveau de la buse, aidant l’imprimante à déposer chaque trait de plastique avec des incréments au niveau du micron, ce qui est important pour les surfaces détaillées.
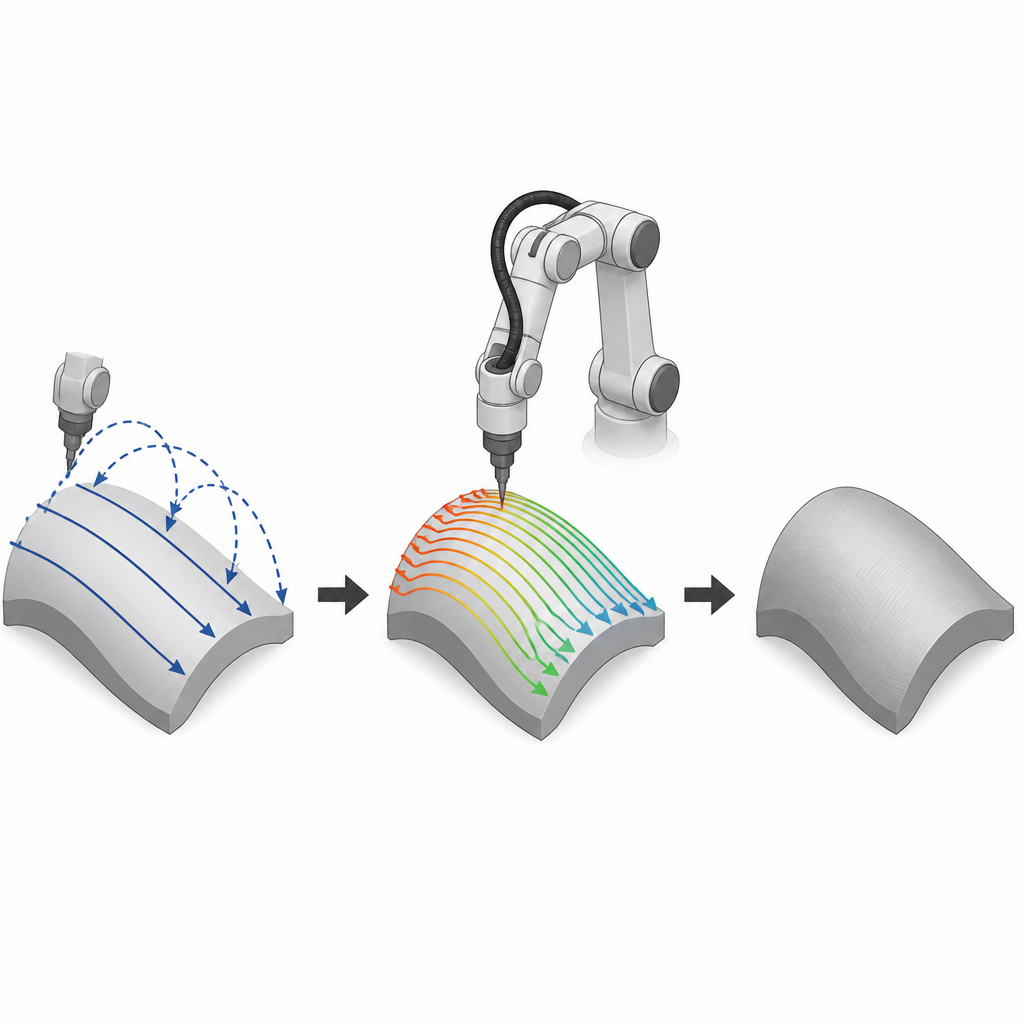
Des trajectoires plus intelligentes pour une impression plus rapide
Au-delà du matériel, l’étude se concentre sur la façon dont le robot choisit sa trajectoire d’impression. L’équipe a développé un algorithme qui découpe chaque couche en courts segments de ligne, puis les réordonne pour que la buse se déplace toujours vers le segment proche suivant. Cela réduit les déplacements inutiles lorsque le plastique n’est pas extrudé. Des tests sur une surface ondulée montrent que, tandis que la distance d’impression totale reste similaire, les « déplacements à vide » chutent fortement, réduisant la longueur de trajet sans extrusion de plus de moitié et raccourcissant la longueur de trajectoire globale d’environ un tiers. En pratique, cela se traduit par des constructions plus rapides, une consommation d’énergie moindre et une usure réduite des pièces en mouvement.
Mettre l’impression courbe à l’épreuve
Pour évaluer les performances du système, l’équipe a imprimé des cubes simples et des formes ondulées plus exigeantes en plastique. En ajustant la résolution des pas moteurs et l’épaisseur des couches, ils ont considérablement réduit les coutures visibles et l’effet d’escalier qui apparaît habituellement sur les parois inclinées. Le bras robotique a atteint des vitesses de dépôt supérieures à celles d’une imprimante trois axes traditionnelle et a pu imprimer des formes lisses à double courbure sans matériau de support supplémentaire en dessous. Les mesures d’épaisseur de couche et de dimensions globales ont montré que le système peut maintenir les erreurs proches des valeurs prévues, même sur des géométries complexes.
Ce que cela signifie pour la fabrication future
Globalement, ce travail montre qu’un bras robotique open source soigneusement conçu peut transformer l’impression 3D standard en un outil plus flexible capable de traiter rapidement et précisément des formes courbes. En combinant mouvement multidirectionnel, modèles mathématiques détaillés, schéma de contrôle en couches et planification de trajectoire plus intelligente, cette approche facilite la création de pièces personnalisées à surfaces lisses et avec moins de supports. De tels systèmes pourraient aider à démocratiser la fabrication avancée dans de plus petits laboratoires et ateliers, en soutenant des applications allant de l’architecture aux dispositifs médicaux sans dépendre de robots industriels fermés et coûteux.
Citation: Zhang, Q., Wang, J., Zhao, Z. et al. Evaluation of open-source robotic-assisted additive manufacturing equipment for additively manufactured three-dimensional curved structure. Sci Rep 16, 15417 (2026). https://doi.org/10.1038/s41598-026-46136-2
Mots-clés: impression 3D robotisée, fabrication additive, robot multi-axes, impression de surfaces courbes, planification de trajectoire